Основная прелесть использования ПЛИС, на мой взгляд, состоит в том, что разработка аппаратуры превращается в программирование со всеми его свойствами: написание и отладка кода как текста на специализированных языках описания аппаратуры (HDL); код распространяется в виде параметризованных модулей (IP-блоков), что позволяет его легко переиспользовать в других проектах; распределенная разработка обширным коллективом разработчиков с системой контроля версий, такой же, как у программистов (Git); и, как и в программировании, ничтожно низкая стоимость ошибки.
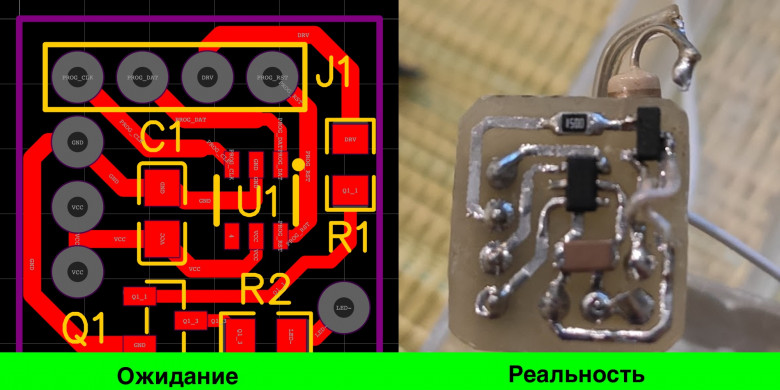
Последнее очень важно, так как если при разработке устройства классическим методом разработчик несет вполне существенные затраты на сборку и производство изделия, и любая схемотехническая ошибка или ошибка трассировки печатной платы — это всегда выход на очередную итерацию и попадание на деньги, то при работе с ПЛИС ошибки ничтожны по своей стоимости и легко устранимы. И даже если в серийном изделии обнаруживается ошибка, то её во многих случаях можно устранить очередным апгрейдом прошивки «в поле» без замены изделия. Короче, с приходом ПЛИС разработка цифровой аппаратуры все больше и больше выглядит как программирование, а это, помимо всего прочего, существенно понижает порог вхождения в тему, и все больше программистов становятся разработчиками «железа». А новые люди, в свою очередь, приносят с собой в индустрию новые подходы и принципы.
В этой статье я хочу поделиться своим небольшим опытом «программирования» микросхем ПЛИС и тем, как я постепенно погружался в тему ПЛИСоводства. Изначально я собирался написать небольшую заметку про открытый тулчейн для синтеза Yosys. Потом — про язык SpinalHDL и синтезируемое микропроцессорное ядро VexRiscv, на нём написанное. Потом — про замену микроконтроллеров микросхемами ПЛИС на примере моей отладочной платы «Карно». Но в процессе я погрузился в историю появления Hardware Description Languages (HDL), и когда я начал писать, Остапа, как это часто бывает, понесло... В общем, получилось то, что получилось.
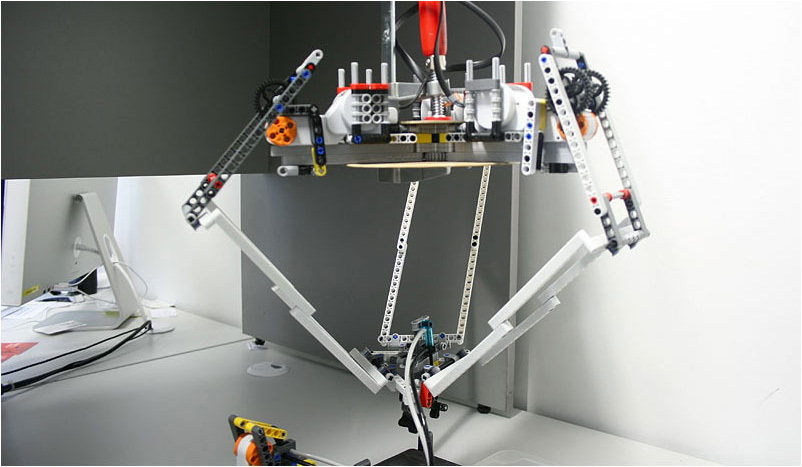
А еще эту статью можно рассматривать как глубокое погружение в то, что происходит вот на этом новогоднем видео.