 Последняя часть инфраструктуры USB — хабы. Хотя хабы — отдельные USB-устройства, они достаточно тесно связаны с другими частями инфраструктуры, чтобы спецификация хабов была частью основной спецификации USB, а код поддержки — частью ядра, расположенной в файле bus/usb/hub.inc.
Последняя часть инфраструктуры USB — хабы. Хотя хабы — отдельные USB-устройства, они достаточно тесно связаны с другими частями инфраструктуры, чтобы спецификация хабов была частью основной спецификации USB, а код поддержки — частью ядра, расположенной в файле bus/usb/hub.inc.Задачи хабов таковы.
- Хабы предоставляют питание всем подключённым устройствам.
- Хабы оповещают хост о подключении и отключении устройств.
- Хабы делают сброс подключённого устройства, попутно определяя его скорость, по команде с хоста.
- Хабы транслируют весь трафик, приходящий от хоста, подключённым устройствам в период после сброса и до отключения, а также трафик от устройств в обратную сторону.
- HighSpeed-хабы содержат Transaction Translator, связывающий HighSpeed-шину с низкоскоростной USB1-шиной.
Трансляция трафика без переключения скорости происходит полностью прозрачно для хоста. Расщеплёнными транзакциями занимается хост-контроллер EHCI, здесь от софта важно только заполнить те поля в аппаратной части структуры канала, которые содержат адрес TT-хаба и порт в TT-хабе — и, разумеется, учитывать время транзакций при планировании. Драйвер хабов управляет остальными пунктами списка задач.
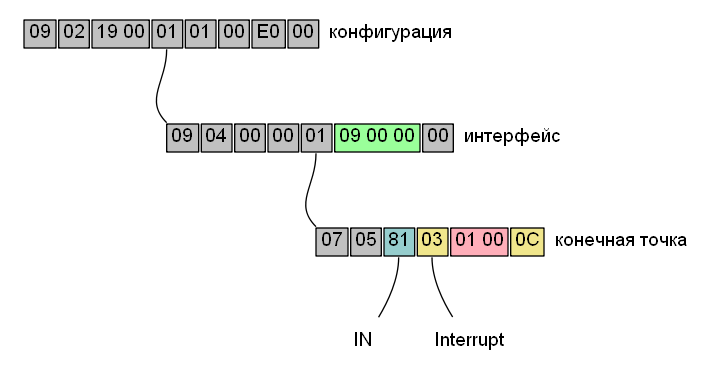
Хабы имеют код класса устройства 9, код подкласса устройства 0 и три варианта 0, 1, 2 для кода протокола. Согласно спецификации USB, HighSpeed-хаб обязан поддерживать режим работы с единым TT для всех своих портов, и дополнительно может, но не обязан, поддерживать режим работы с отдельным TT для каждого порта. Типичный случай — режим с различными TT отсутствует, тогда код протокола равен 0. В случае поддержки такого режима в данных конфигурации должны быть два варианта дескриптора интерфейса с одинаковым номером интерфейса. Тогда код протокола 1 идентифицирует режим с единым TT, который должен быть принят по умолчанию, а код протокола 2 — режим с различными TT, включаемый командой
SET_INTERFACE. Существование в живой природе хабов, поддерживающих режим с различными TT, не подтверждено, как и польза от этого режима, поэтому драйвер хабов даже не пытается его обнаружить и включить и просто использует режим единого TT, включённый по умолчанию.Обнаружив интерфейс класса 9, уровень логического устройства читает структуру
usb_hub_callbacks, содержащую указатели на функции драйвера usb_hub_init и usb_hub_disconnect. Работа драйвера начинается, когда уровень логического устройства вызывает usb_hub_init, и заканчивается, когда уровень поддержки каналов вызывает usb_hub_disconnect в ответ на отключение устройства.