Читать далее

Пользователь
 . В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления.
. В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления. 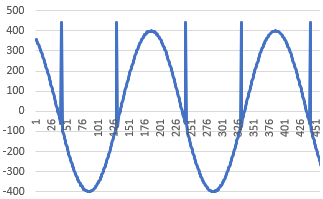
Введение
Синхронный прием данных программой LabVIEW через линию USB/СОМ работает достаточно хорошо, если принимаемые данные не содержат периодических фрагментов.
При обнаружении таких фрагментов LabVIEW вставляет «шумовые» байты и тем самым искажает принимаемый сигнал.
В этой работе рассмотрена причина появления шумов и вариант обеспечения «бесшумового» приема COM данных.
Состояние проблемы
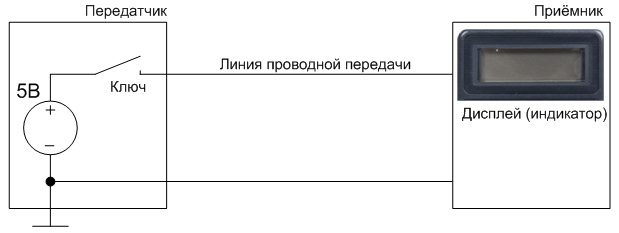
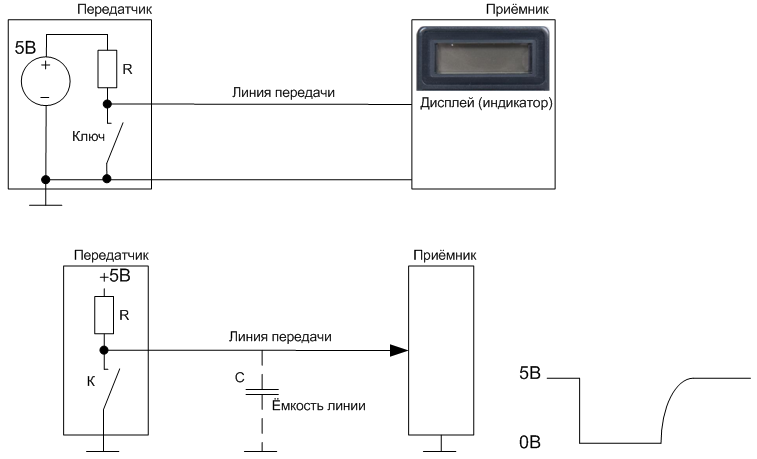
На Рисунок 1 показана схема LabVIEW интерфейса, который каждый 10 мс такт посылает в СОМ порт запрос (один байт ASCII = 1). На каждый запрос контроллер высылает 6 байт (2 байта от одного датчика и 4 байта от другого). Соответственно, интерфейс должен принимать 6 байт контроллера. В основном, так и происходит, но в отдельные моменты количество принимаемых байт не равно и не кратно 6, в эти же моменты принимаемые сигналы имеют выбросы — искажения, например, как показано на Рисунок 2.
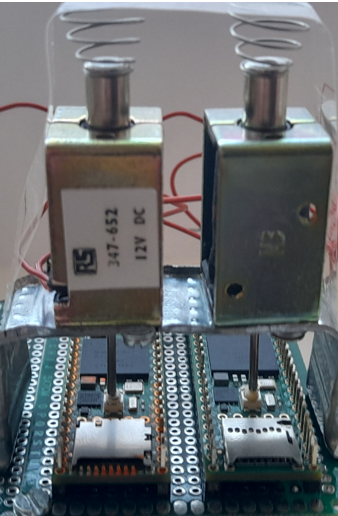
Загрузка контроллера Teensy, подключенного к компьютеру через СОМ порт при отсутствии других Teensy, не вызывает затруднений. Однако, загрузка одновременно-подключенной группы контроллеров Teensy может оказаться проблематичной [1,2,3,4]. Варианты решения этой проблемы обсуждаются ниже.

ВВЕДЕНИЕ
Зачастую, документация содержит неполный список параметров, необходимых для построения компьютерных моделей процессов или объектов, параметры могут не соответствовать контрольным отношениям.
В этой работе рассматриваются варианты построения динамических моделей двигателя постоянного тока по неполной спецификации и при наличии несоответствий между параметрами спецификации, также рассматривается вопрос обеспечения адекватности модели двигателя постоянного тока следующим режимам работы:
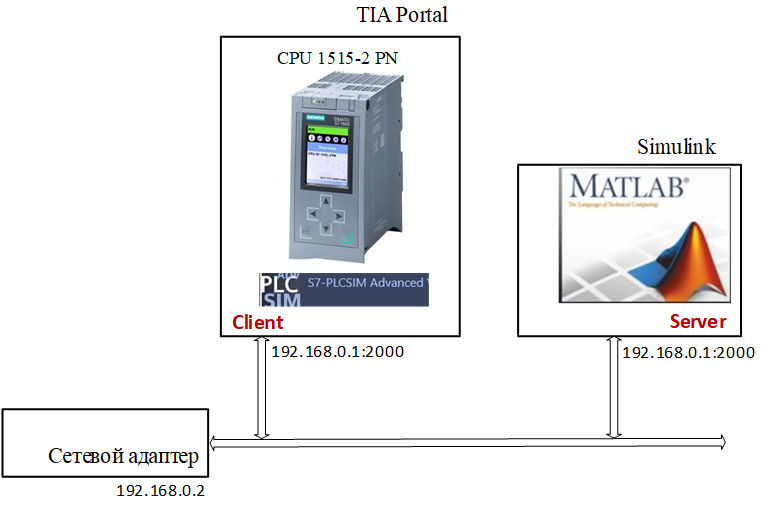
В этой работе показана детальная авторская реализация объединения сред TIA Portal и Simulink для совместного моделирования с обменом данными, работающая при любом, даже самом малом, шаге квантования (моделирования). Этот вариант позволяет также тестировать PLC контроллеры TIA Portal на частотах квантования контроллеров. Синхронизация сред осуществляется без применения таймеров реального времени. Приведен пример построения быстродействующего контура, обеспечивающего управление аналоговым неустойчивым объектом Simulink виртуальным ПЛК среды TIA Portal. Экспериментально определено, что предлагаемое объединение сред не влияет на результаты моделирования.
Состояние проблемы
Интегрированная среда разработки систем автоматизации TIA Portal содержит инструментальные средства для конфигурирования, настройки, тестирования и обслуживания систем. Мощная среда MATLAB/Simulink обеспечивает эффективное моделирование и оптимизацию сложных динамических систем. Совместное моделирование TIA Portal и Simulink повышает качество проектирования систем автоматизации и управления и сокращает сроки проектирования.
Известны примеры связи сред TIA Portal – Simulink через OPC сервер, в которых среды обмениваются пакетами данных с максимальной частотой 10 раз с секунду [1,2,3]. Это ограничение определяет максимальную частоту квантования. Для моделирования и работы быстродействующих систем, которые характеризуются широкой полосой пропускания, требуется высокая частота квантования.
Скорость непосредственной передачи/приема данных через TCP канал в десятки раз выше скорости передачи через OPC сервер. Однако, для TCP связи с контроллерами TIA Portal, которые выступают в роли TCP клиента, необходимо, чтобы модель Simulink работала в режиме сервера, а таких библиотечных средств у Simulink нет.

В этой работе рассмотрен пример искажения данных, передаваемых в виде звукового потока.
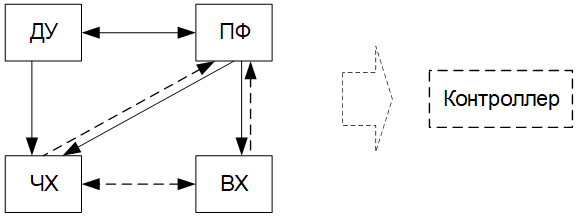
За основу задания динамических свойств систем может быть принята любая из форм представления операторов: дифференциальные уравнения (ДУ), передаточные функции (ПФ), временные характеристики (ВХ) или частотные характеристики (ЧХ), однако для конкретных задач целесообразно выбирать наиболее рациональную форму [1].
Возможные преобразования форм представления моделей вход-выход показаны на Рисунок 1. Сплошные линии орграфа показывают однозначные преобразования, штриховые - неоднозначные преобразования экспериментальных данных. Результаты последних преобразований зависят от выбора структуры оператора и алгоритма обработки данных.
>> pct = imread('DC_OS.jpg');