Прежде чем продолжить обсуждение основных черт сетей ZigBee хочу вставить небольшую ремарку.
То, о чем я писал в
предыдущем топике и собираюсь продолжить в этом, относится к утвержденному в 2007 году стандарту ZigBee Pro Feature Set 2006. Эта спецификация уже содержит все основные черты, делающие сети ZigBee наиболее предпочтительным вариантом при создании сенсорных сетей различного назначения, а именно:
1) самоорганизация и самовосстановление,
2) структурная гибкость – возможность создания разных по топологии сетей – звезда, дерево, ячеистая (mesh) сеть,
3) возможность выбора алгоритмов маршрутизации, в зависимости от требований приложения,
4) механизм стандартизации приложений – профили приложений, кластеры, конечные точки, привязки,
5) гибкий механизм безопасности,
6) низкое энергопотребление,
7) простота развертывания, обслуживания и модернизации.
Но это не значит, что жизнь остановилась.
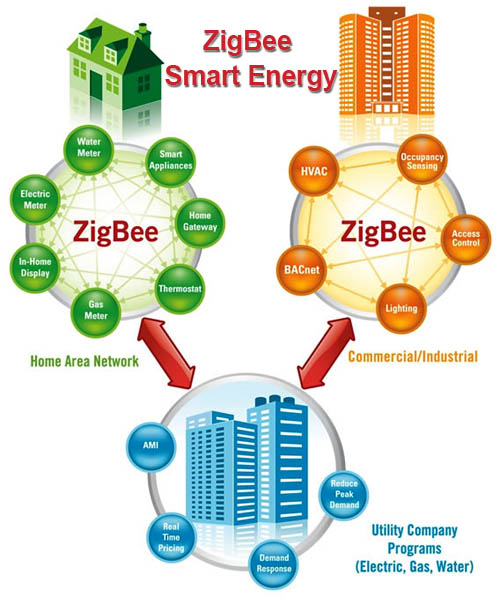
Еще в 2008 году, чтобы обеспечить функционирование домовой сети (Home Area Network – HAN) на основе IP альянс ZigBee начал работу над расширением своего стандарта – профилем Smart Energy 2.0. Профиль предполагает поддержку любого транспортного уровня на основе IP-совместимых стандартов, включая ZigBee IP и другие технологии передачи – как радиочастотные, так и по силовой электропроводке – Power Line Carier (PLC).
Профиль обеспечивает взаимодействие между ZigBee и другими сетевыми технологиями. Альянс ZigBee занимается разработкой сетевого уровня Интернет протокола (IP), называемого ZigBee IP и базирующегося на технологии 6LoWPAN (IPv6 по низкоэнергетическим беспроводным персональным сетям). Публичное обсуждение последней рабочей версии (draft 0.9) профиля Smart Energy 2.0 завершилось 25 августа 2012 года. Выход финальной версии ожидается в ближайшее время.
Но уже сейчас выпускается множество сетевых устройств, поддерживающих ZigBee IP, например:
 Шлюз ZigBee – Ethernet
Шлюз ZigBee – Ethernet
 Шлюз ZigBee – WiFi – Ethernet
Шлюз ZigBee – WiFi – Ethernet
 ZigBee – USB Adapter/
ZigBee – USB Adapter/