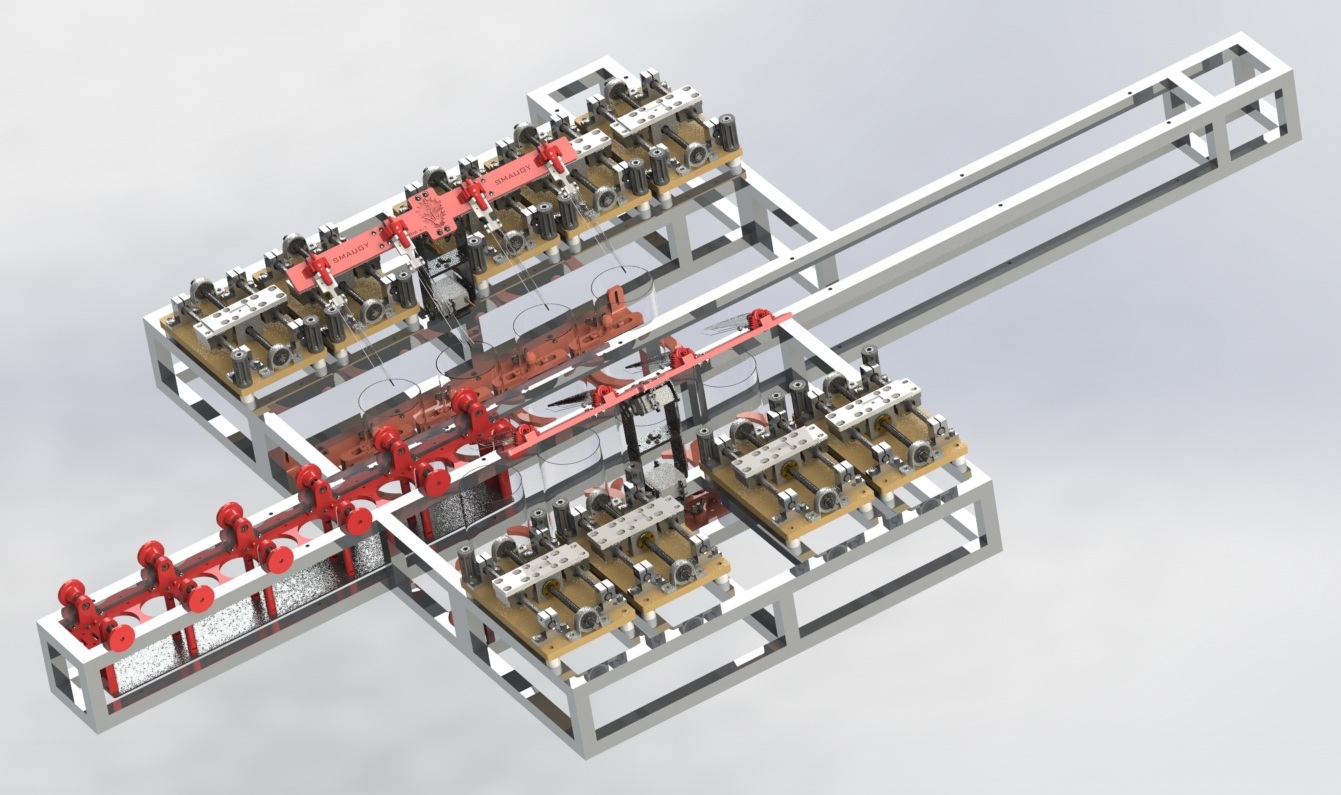
Реализация многокомпонентного конвейерного дозатора веществ
В текущей статье я хотел бы продемонстрировать одну из возможных реализаций автоматического многокомпонентного конвейерного дозатора веществ а так же поделиться полученным опытом. Изначальное техническое задание было весьма простым и включало в себя 4 параллельно работающих дозирующих канала с управлением по средствам кнопок и программного обеспечения для ПК по USB. Основные компоненты довольно вязкие жидкости — пропиленгликоль, ароматизаторы, глицерин и прочее. Конечное устройство должно было располагаться в офисном помещении, где работает персонал — т.е. быть максимально тихим. Конструкция каждого дозируемого канала должна быть максимально простой и иметь минимальную стоимость. В первом приближении все казалось довольно просто, но с развитием проекта увеличивалось и ТЗ, и в итоге получился целый конвейерный дозатор. Кому подобная тематика интересна — прошу под кат. В статье используется большое количество текстовой информации, изображений и видеоряда.
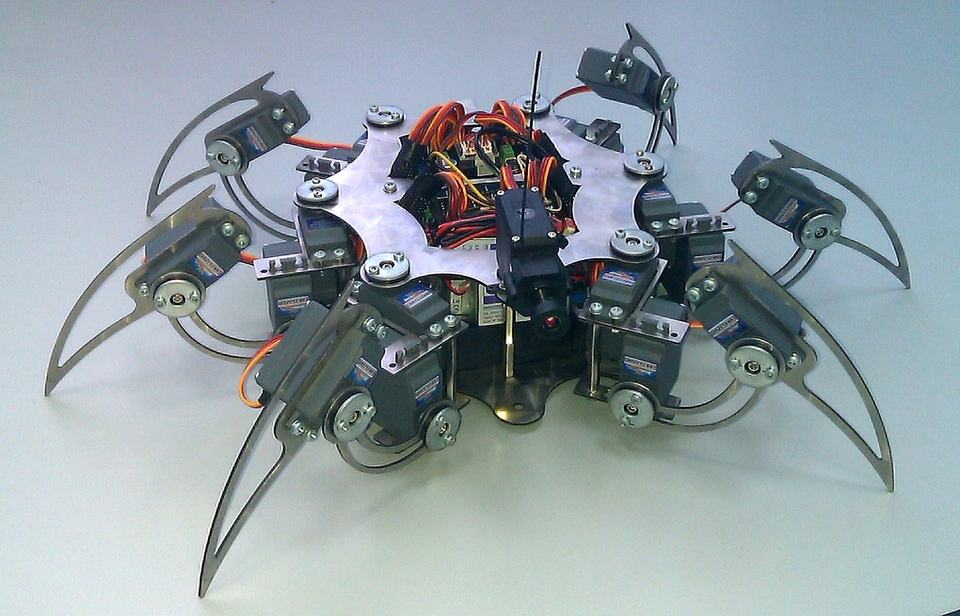
В последующем изложении хотел бы продемонстрировать реализацию шестиконечного манипулятора HEXAPOD, выполненного из корабельной стали. Текущий проект не претендует на оригинальность, инновационные подходы, реализацию сложных алгоритмов управления, использования математических моделей поведения, а так же изначальное проектирование уже существующих и эффективно работающих аппаратных средств. В текущей статье я постараюсь изложить собственный подход к реализации манипулятора из максимально доступных средств и материалов периферийного города.
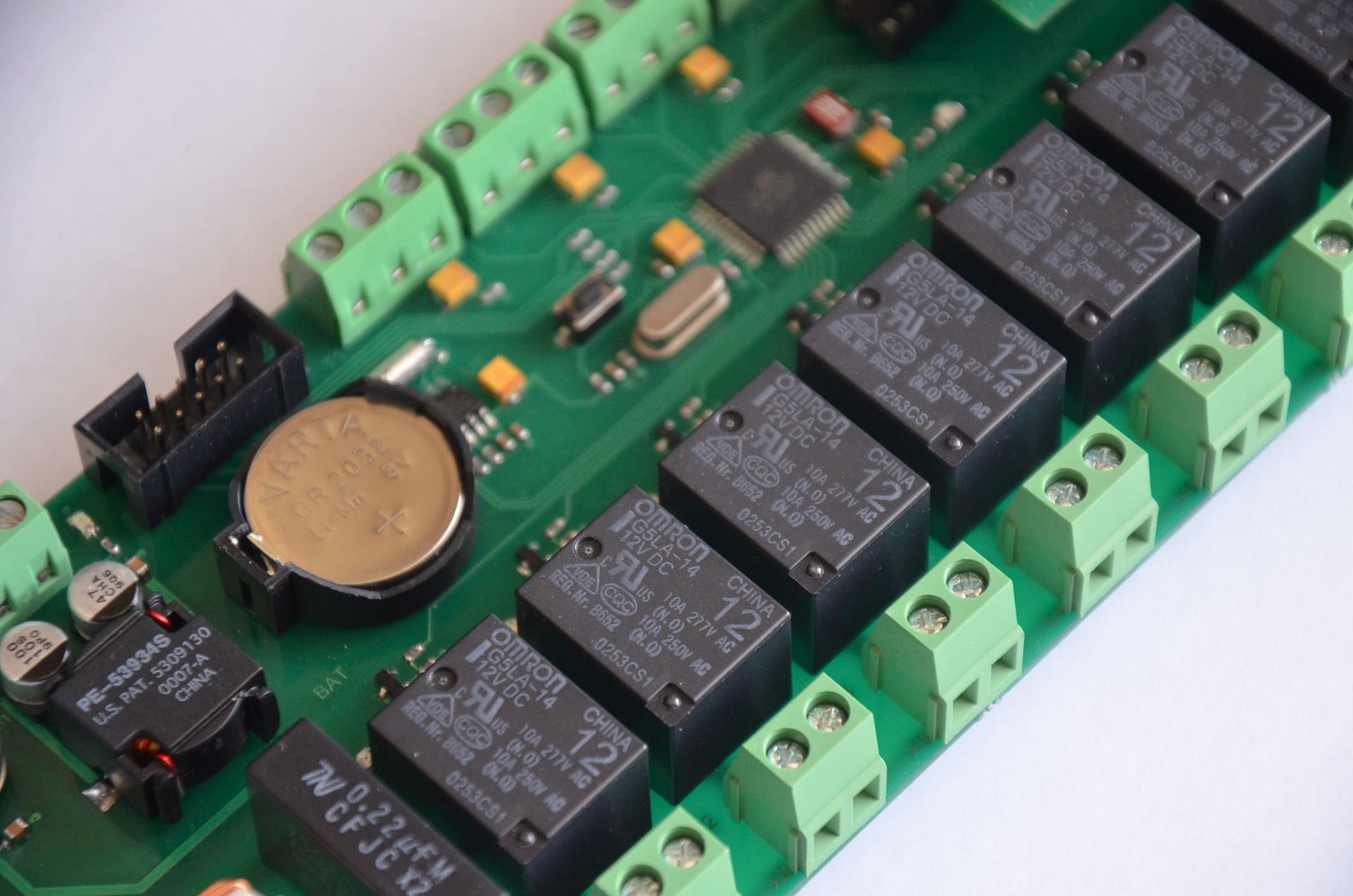
В последующем изложении хотел бы продемонстрировать и поделиться своими наработками по аквариумному контроллеру. На мой взгляд, тематика весьма востребована среди аквариумистов, но далеко не все аспекты и проблемы рассмотрены. Возможно, кого-то что-либо заинтересует, или кто-то захочет повторить конструкцию, поэтому в теме прилагаются все необходимые файлы. Для тех, кому захочется покопаться в программной составляющей устройства прилагаются все исходники.