0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:

2.Фунциональная схема

Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.

4.Принципиальная схема

Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
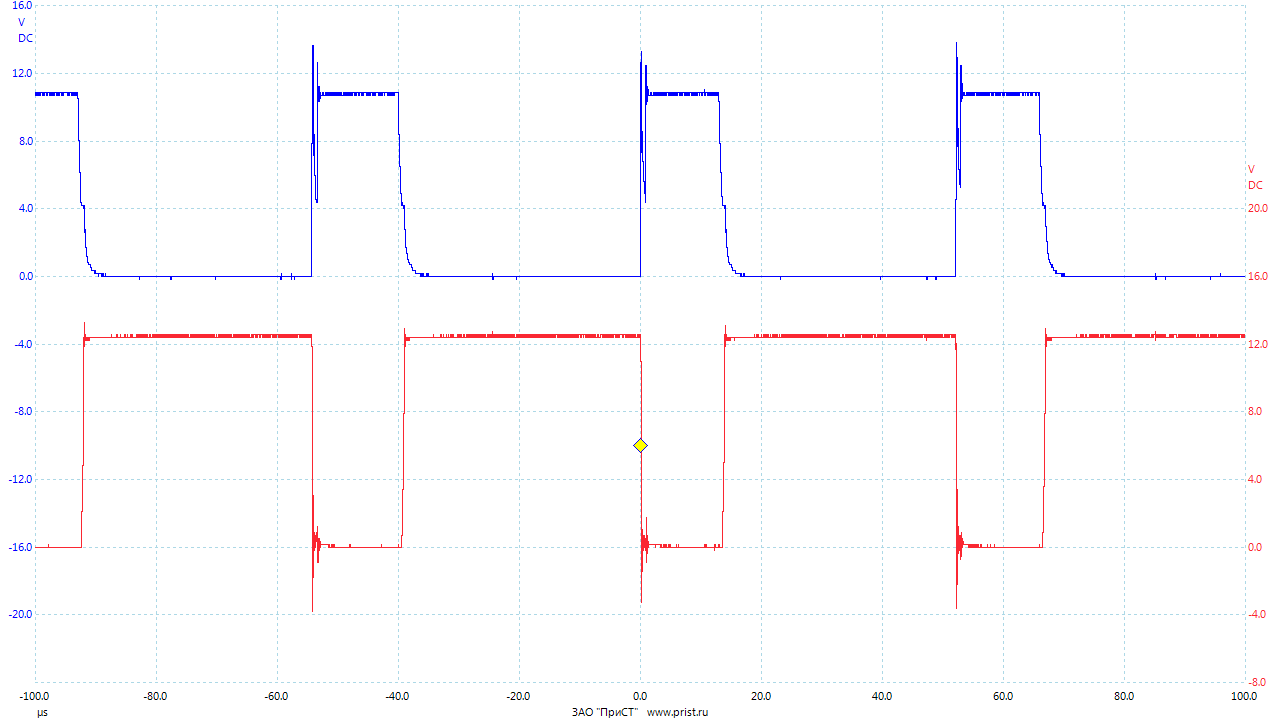
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.


5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:




7. Дисклаймер
Я не электронщик и не писатель, просто решил поделиться опытом. Может что-то покажется вам слишком очевидным, а что-то слишком сложным, а о чем-то забыл упомянуть вообще. Не стесняйтесь вносить конструктивные предложения и по тексту и по улучшению схемы, чтобы люди могли запросто это повторить, если будет такое желание.

