Про беспилотные автомобили постоянно мелькают новости, но что же на самом деле происходит в этой сфере? Как беспилотные автомобили ездят? Кто их производит? Почему они до сих пор не ездят массово по улицам? Попробуем разложить все по полочкам.

Ранняя версия беспилотника Lyft
Это автомобиль, оборудованный системой автоматического управления, способный передвигаться из точки А в точку Б без участия человека.
Чтобы приехать в пункт назначения, беспилотный автомобиль должен знать маршрут, понимать окружающую обстановку, соблюдать ПДД и корректно взаимодействовать с пешеходами и другими участниками дорожного движения. Чтобы соответствовать этим требованиям, беспилотник использует следующие технологии:
Организация под названием SAE International сделала доброе дело и стандартизировала 5 уровней автономности, которых придерживаются все игроки на рынке:
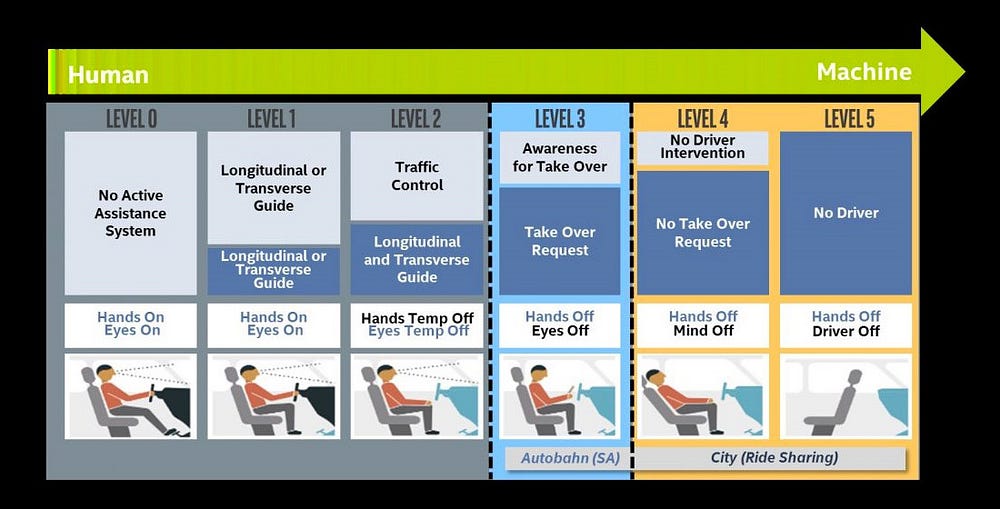
Уровни автономности от 0 до 5
Большинство автопроизводителей осознали что будущее за беспилотным транспортом и ринулись открывать новые отделы и покупать стартапы. Кроме автопроизводителей в гонке участвует не только множество стартапов, но также и IT-гиганты вроде Google, Яндекс и Apple. Вот самые основные.
Будучи одним из ведущих автопроизводителей, GM потратил кучу денег чтобы удержаться в лидерах беспилотных авто. В 2016-ом, приобрел стартап Cruise Automation, занимавшийся разработкой беспилотника, за более чем 1 миллиард долларов. В Cruise суммарно влили $2.25 миллиарда инвестиций от SoftBank и $1.1 миллиард от GM в 2018-ом. Чтобы еще больше доминировать на рынке автономии, GM также приобрел производителя лидаров. GM тестирует свои беспилотники в Сан Франциско с планами расширения на Нью-Йорк. Первые коммерческие поездки беспилотников запланированы на 2019 год.

Самый старый стартап, был основан еще в 2009 году. На данный момент считается самым совершенным беспилотным автомобилем. Оцениваясь в $175 миллиардов (!), Waymo уже проехал суммарно 10 миллионов миль автомобилями Chrysler, Honda и Jaguar. Совсем недавно, Waymo озвучил свои планы докупить еще 62,000 Fiat Chrysler для будущего платного беспилотного такси.

После очень серьезного судебного иска от Waymo дела у Uber немного пошатнулись. Потом пошатнулись после ДТП в результате которого погиб человек. Однако, Uber не сдался, и вместе с партнерами вроде Volvo и Daimler собрал $500 миллионов инвестиций от Toyota. Временно беспилотники Uber не ездят самостоятельно, а управляются водителями, попутно оцифровывая города в HD карты. Вероятно в будущем Uber интегрирует беспилотные автомобили в свой сервис такси.

В сравнении с агрессивным расширением и маркетингом Uber, подход Lyft более фокусирован. Lyft запартнерился с Aptiv, бывшим когда-то на грани банкротства. Вместе они совершили более 5000 платных поездок на беспилотниках (всего с 20 автомобилями) в Лас-Вегасе. При заказе такси Lyft, пассажир может выбрать беспилотное такси.

У Tesla совсем другой взгляд на беспилотное будущее. Илон Маск считает что беспилотник может работать только на одних камерах (ведь человек управляет автомобилем с помощью всего пары глаз), без лидаров. Несмотря на то, что автомобили Tesla обладают функциями автопилота, они все равно топчутся на 3-ем уровне автономности, да и аварий из-за автопилота тоже хватает.

Baidu раскачивает локальную китайскую лодку беспилотников с 2014 года. В 2017-ом, анонсировала Apollo, open-source (открытую) платформу для беспилотных автомобилей. Baidu нацелился на массовый выпуск беспилотных автомобилей с 2019 до 2020, но ее шансы пошатнулись после того как ряд AI-специалистов покинули компанию (включая Lu Qi).

Waymo был основан в 2009-ом и только сейчас они более-менее готовы для коммерческих поездок (и то в пределах солнечной Калифорнии). То есть спустя почти 10 лет. Почему так долго? Хоть и гонка беспилотных технологий и ускорилась за последние 5 лет, все компании испытывают общие проблемы:
Лидар это по сути лазерная установка, которая постоянно крутится и “стреляет” лазером 360 градусов, выдавая расстояние до каждой точки, которую удалось измерить. Вот видео для большей наглядности:
К сожалению, лидар стоит кучу денег (от 500 000р за 1 штуку), а их в беспилотном автомобиле надо много (2–5 штук). Так еще и от него никак не избавиться, ведь только радара и камер не хватит чтобы четко ориентироваться на местности.
Различные компании ведут работы по снижению стоимости лидара и выпуску нового, дешевого твердотельного лидара (без крутящихся элементов), но такие пока продукты еще в разработке.
Как было сказано выше AI это сердце автомобиля. AI определяет объекты с камер, пытается угадать кто это (собака, человек, автомобиль, дорожный знак и пр.), как поведут себя пешеходы и другие машины. Чтобы такой искусственный интеллект работал, инженеры “скармливают” ему огромные массивы данных, чтобы специальные алгоритмы могли обучаться на этих данных. Чем больше качественных данных на входе, тем лучше алгоритмы будут работать.
Хоть алгоритмы и продвинулись далеко, они все еще глупы как 2-летний ребенок. Яркий пример — инцидент с беспилотником Uber (из-за которого погиб человек), алгоритм не смог распознать человека на дороге (в прочем, как не успел его заметить и водитель). А ведь помимо человека надо “видеть” еще и много других объектов — каждую машину, дорожный знак, светофор, уметь определять полосы движения и много других вещей.
Будем честны, почти ни один беспилотный автомобиль не умеет нормально ездить в условиях снегопада или сильного дождя. Исключение — университет MIT. Ребята научились ориентироваться по слепкам дорожного полотна под машиной.
Беспилотникам не подходят простые карты и простая точность GPS (погрешность 3–10 метров), автомобилю нужно понимать где он находится с сантиметровой точностью. Несмотря на то что у беспилотника куча сенсоров, необходимо иметь точную информацию об окружающей местности (геометрию дорожной разметки, границы дороги, ближайшие дорожные знаки и пр). Вся эта информация есть в так называемых HD-картах.

Один из автомобилей Google Street View
Чтобы поддерживать картографию в актуальном состоянии специальные картографические автомобили (спец. автомобиль с камерами и лидарами) должны ездить по улицам и “оцифровывать” их. Таким образом, с появлением гонки беспилотных автомобилей началась и гонка картографии среди таких компаний как Here, TomTom, DeepMap, lvl5, Carmera, Google и прочих. В 21-ом веке данные — это новое золото.
Беспилотным автомобилям требуется новая дорожная инфраструктура. И не просто инфраструктура, а умная инфраструктура в которой автомобили могли бы общаться не только с самой инфраструктурой (знаки, светофоры и пр.), но и с другими автомобилями. Вот немного основных терминов:
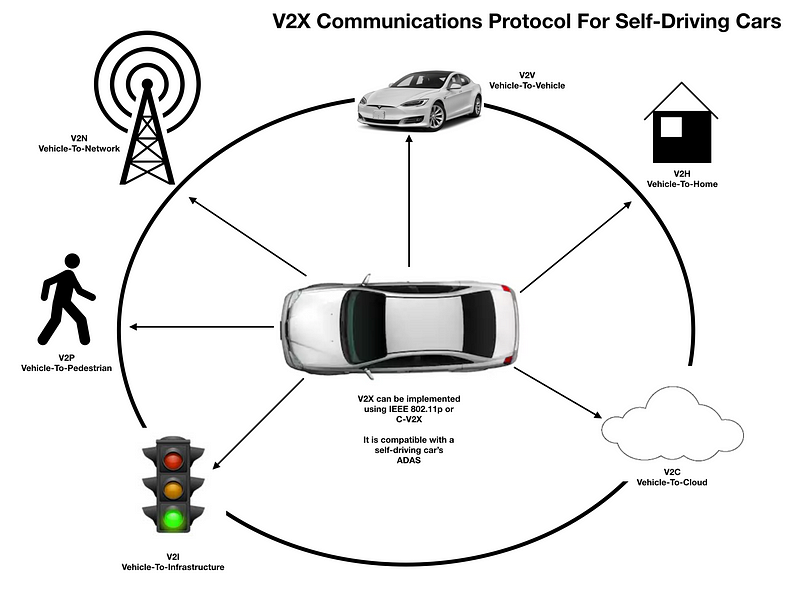
Например, автомобиль едет по шоссе, а дорожный знак за 300м впереди сам сообщает “я знак такой-то, нахожусь там-то”. Беспилотный автомобиль сможет заранее понимать что впереди и планировать свои действия в соответствии с этой информацией.
Люди все еще не особо доверяют беспилотным автомобилям. Согласно исследованию Reuters и Ipsos только лишь 38% мужчин и 17% женщин сказали что чувствовали бы себя комфортно в беспилотном автомобиле. Вообщем-то и не удивительно, технология беспилотных автомобилей довольно молодая, люди не успели привыкнуть. Автопроизводителям и стартапам еще предстоит завоевать доверие людей.
Мы становимся свидетелями того, как беспилотные автомобили медленно появляются на наших дорогах. Вряд ли в следующие 5 лет мы увидим их как массовое явление: ни алгоритмы, ни инфраструктура еще не доросли. Однако, с приходом V2V/V2I возможно появятся специальные зоны беспилотного транспорта, где можно будет вызвать привычный Uber/Яндекс и доехать за полчасика на беспилотнике до работы.
Ранняя версия беспилотника Lyft
Что такое беспилотный автомобиль
Это автомобиль, оборудованный системой автоматического управления, способный передвигаться из точки А в точку Б без участия человека.
Как работают беспилотные автомобили
Чтобы приехать в пункт назначения, беспилотный автомобиль должен знать маршрут, понимать окружающую обстановку, соблюдать ПДД и корректно взаимодействовать с пешеходами и другими участниками дорожного движения. Чтобы соответствовать этим требованиям, беспилотник использует следующие технологии:
- Камеры: визуальное обнаружение объектов, например, дорожная разметка и знаки
- Радар: определение препятствий и объектов впереди и сзади, а также определение расстояния до них
- Лидар: похож на радар, но гораздо четче и позволяет обнаруживать объекты вокруг автомобиля (полный обзор 360 градусов)
- AI (искусственный интеллект): мозги машины. Обрабатывает данные с камер и сенсоров, управляет автомобилем и принимает решения.
Уровни автономности
Организация под названием SAE International сделала доброе дело и стандартизировала 5 уровней автономности, которых придерживаются все игроки на рынке:
- Level 0 — No Automation: Водитель должен контролировать все — руль, тормоз и газ. Обычная машина.
- Level 1 — Driver Assistance: Автомобиль помогает тормозить или ускоряться. Автомобили с круиз-контролем — это как раз про level 1.
- Level 2 — Partial Automation: Автомобиль может одновременно контролировать ускорение и торможение, но человек должен следить за ситуацией и быть готовым принять управление. Самый яркий пример уровня 2 — Tesla.
- Level 3 — Conditional Automation: Автомобиль может полностью управлять движением, но в какой-то момент может попросить принять управление на себя. Ходят слухи что Audi A8 2018 года выпуска умеет делать все это, но пока нет ни одного обзора.
- Level 4 — High Automation: Умеет все что умеет уровень 3, но также может справляться с более сложными дорожными ситуациями. В целом можно отпустить руль и ничего не делать, но если автомобиль не сможет принять решение он об этом оповестит и плавно припаркуется на обочине. О четвертом уровне заявляют такие компании как Waymo или Aptiv
- Level 5 — Full Automation: Полная автономия, участие человека не требуется. Машина сама принимает решение в любой ситуации, руль может отсутствовать.
Уровни автономности от 0 до 5
Ключевые игроки рынка
Большинство автопроизводителей осознали что будущее за беспилотным транспортом и ринулись открывать новые отделы и покупать стартапы. Кроме автопроизводителей в гонке участвует не только множество стартапов, но также и IT-гиганты вроде Google, Яндекс и Apple. Вот самые основные.
General Motors
Будучи одним из ведущих автопроизводителей, GM потратил кучу денег чтобы удержаться в лидерах беспилотных авто. В 2016-ом, приобрел стартап Cruise Automation, занимавшийся разработкой беспилотника, за более чем 1 миллиард долларов. В Cruise суммарно влили $2.25 миллиарда инвестиций от SoftBank и $1.1 миллиард от GM в 2018-ом. Чтобы еще больше доминировать на рынке автономии, GM также приобрел производителя лидаров. GM тестирует свои беспилотники в Сан Франциско с планами расширения на Нью-Йорк. Первые коммерческие поездки беспилотников запланированы на 2019 год.
Waymo (лидер по технологичности)
Самый старый стартап, был основан еще в 2009 году. На данный момент считается самым совершенным беспилотным автомобилем. Оцениваясь в $175 миллиардов (!), Waymo уже проехал суммарно 10 миллионов миль автомобилями Chrysler, Honda и Jaguar. Совсем недавно, Waymo озвучил свои планы докупить еще 62,000 Fiat Chrysler для будущего платного беспилотного такси.
Uber
После очень серьезного судебного иска от Waymo дела у Uber немного пошатнулись. Потом пошатнулись после ДТП в результате которого погиб человек. Однако, Uber не сдался, и вместе с партнерами вроде Volvo и Daimler собрал $500 миллионов инвестиций от Toyota. Временно беспилотники Uber не ездят самостоятельно, а управляются водителями, попутно оцифровывая города в HD карты. Вероятно в будущем Uber интегрирует беспилотные автомобили в свой сервис такси.
Lyft (сервис такси, конкурент Uber)
В сравнении с агрессивным расширением и маркетингом Uber, подход Lyft более фокусирован. Lyft запартнерился с Aptiv, бывшим когда-то на грани банкротства. Вместе они совершили более 5000 платных поездок на беспилотниках (всего с 20 автомобилями) в Лас-Вегасе. При заказе такси Lyft, пассажир может выбрать беспилотное такси.
Tesla
У Tesla совсем другой взгляд на беспилотное будущее. Илон Маск считает что беспилотник может работать только на одних камерах (ведь человек управляет автомобилем с помощью всего пары глаз), без лидаров. Несмотря на то, что автомобили Tesla обладают функциями автопилота, они все равно топчутся на 3-ем уровне автономности, да и аварий из-за автопилота тоже хватает.
Baidu
Baidu раскачивает локальную китайскую лодку беспилотников с 2014 года. В 2017-ом, анонсировала Apollo, open-source (открытую) платформу для беспилотных автомобилей. Baidu нацелился на массовый выпуск беспилотных автомобилей с 2019 до 2020, но ее шансы пошатнулись после того как ряд AI-специалистов покинули компанию (включая Lu Qi).
Почему так долго?
Waymo был основан в 2009-ом и только сейчас они более-менее готовы для коммерческих поездок (и то в пределах солнечной Калифорнии). То есть спустя почти 10 лет. Почему так долго? Хоть и гонка беспилотных технологий и ускорилась за последние 5 лет, все компании испытывают общие проблемы:
Лидар
Лидар это по сути лазерная установка, которая постоянно крутится и “стреляет” лазером 360 градусов, выдавая расстояние до каждой точки, которую удалось измерить. Вот видео для большей наглядности:
К сожалению, лидар стоит кучу денег (от 500 000р за 1 штуку), а их в беспилотном автомобиле надо много (2–5 штук). Так еще и от него никак не избавиться, ведь только радара и камер не хватит чтобы четко ориентироваться на местности.
Различные компании ведут работы по снижению стоимости лидара и выпуску нового, дешевого твердотельного лидара (без крутящихся элементов), но такие пока продукты еще в разработке.
AI (искусственный интеллект)
Как было сказано выше AI это сердце автомобиля. AI определяет объекты с камер, пытается угадать кто это (собака, человек, автомобиль, дорожный знак и пр.), как поведут себя пешеходы и другие машины. Чтобы такой искусственный интеллект работал, инженеры “скармливают” ему огромные массивы данных, чтобы специальные алгоритмы могли обучаться на этих данных. Чем больше качественных данных на входе, тем лучше алгоритмы будут работать.
Хоть алгоритмы и продвинулись далеко, они все еще глупы как 2-летний ребенок. Яркий пример — инцидент с беспилотником Uber (из-за которого погиб человек), алгоритм не смог распознать человека на дороге (в прочем, как не успел его заметить и водитель). А ведь помимо человека надо “видеть” еще и много других объектов — каждую машину, дорожный знак, светофор, уметь определять полосы движения и много других вещей.
Погодные условия
Будем честны, почти ни один беспилотный автомобиль не умеет нормально ездить в условиях снегопада или сильного дождя. Исключение — университет MIT. Ребята научились ориентироваться по слепкам дорожного полотна под машиной.
Картография
Беспилотникам не подходят простые карты и простая точность GPS (погрешность 3–10 метров), автомобилю нужно понимать где он находится с сантиметровой точностью. Несмотря на то что у беспилотника куча сенсоров, необходимо иметь точную информацию об окружающей местности (геометрию дорожной разметки, границы дороги, ближайшие дорожные знаки и пр). Вся эта информация есть в так называемых HD-картах.
Один из автомобилей Google Street View
Чтобы поддерживать картографию в актуальном состоянии специальные картографические автомобили (спец. автомобиль с камерами и лидарами) должны ездить по улицам и “оцифровывать” их. Таким образом, с появлением гонки беспилотных автомобилей началась и гонка картографии среди таких компаний как Here, TomTom, DeepMap, lvl5, Carmera, Google и прочих. В 21-ом веке данные — это новое золото.
Инфраструктура
Беспилотным автомобилям требуется новая дорожная инфраструктура. И не просто инфраструктура, а умная инфраструктура в которой автомобили могли бы общаться не только с самой инфраструктурой (знаки, светофоры и пр.), но и с другими автомобилями. Вот немного основных терминов:
- V2V (vehicle-to-vehicle) — автомобили обмениваются информацией напрямую друг с другом
- V2I (vehicle-to-infrastructure) — автомобили обмениваются информацией с дорожной инфраструктурой
- V2P (vehicle-to-pedestrian) — автомобили обмениваются информацией с пешеходами (например, автомобиль видит смартфон пешехода и понимает что тут находится человек)
Например, автомобиль едет по шоссе, а дорожный знак за 300м впереди сам сообщает “я знак такой-то, нахожусь там-то”. Беспилотный автомобиль сможет заранее понимать что впереди и планировать свои действия в соответствии с этой информацией.
Доверие человека
Люди все еще не особо доверяют беспилотным автомобилям. Согласно исследованию Reuters и Ipsos только лишь 38% мужчин и 17% женщин сказали что чувствовали бы себя комфортно в беспилотном автомобиле. Вообщем-то и не удивительно, технология беспилотных автомобилей довольно молодая, люди не успели привыкнуть. Автопроизводителям и стартапам еще предстоит завоевать доверие людей.
Что дальше?
Мы становимся свидетелями того, как беспилотные автомобили медленно появляются на наших дорогах. Вряд ли в следующие 5 лет мы увидим их как массовое явление: ни алгоритмы, ни инфраструктура еще не доросли. Однако, с приходом V2V/V2I возможно появятся специальные зоны беспилотного транспорта, где можно будет вызвать привычный Uber/Яндекс и доехать за полчасика на беспилотнике до работы.

