Круто! Поздравляю с таким достижением! Есть вопрос: у вас антенна расположена вертикально земле на верху коптера. Может это и есть причина сигнала… Коли коптер почти все время у вас над головой, то было бы логично расположить антенну горизонтально и под шасси, тогда диаграмма направленности антенны была бы гораздо более подходящей. Либо же использовать две антенны в разных плоскостях. Коптерами никогда не занимался… Так, мысли в слух.
Спасибо! Антенны приемника расположены под корпусом коптера, разведены примерно на 60 градусов (на заставочной фото немного видно — усики правее gopro). Возможно, один ус нужно было ставить горизонтально, а другой вертикально, как раз для высотных полетов. Попробую когда соберусь покорять 1,5км
Отлично! 28 минут на 13" пропеллерах — великолепный результат.
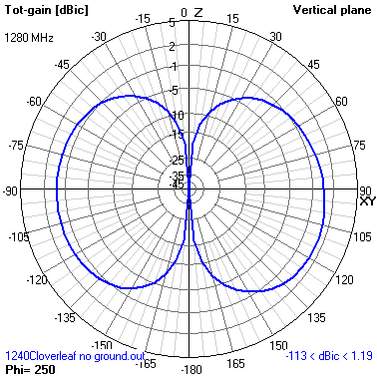
Насчет видеоприема: вы используете антенны CL/SPW, судя по видимому на фотографиях кожуху — стандартные Spironet. Выбор хороший, но у них есть одна особенность: прямо над/под антенной — «мертвая зона» передатчика и приемника, в которой прием намного хуже, чем сбоку или по диагонали (см. изображение). Таким образом, если вы взлетали вертикально, то коптер постояннo как раз и находился в этой зоне, чем и обуславливаллся слабый видеосигнал. Для будущих полетов рекомендую взлетать не вертикально, а одновременно удаляясь от точки взлета по горизонтали — прием будет намного лучше.
Спасибо!
Абсолютно верно, использованы стандартные Spironet, к ним меньше всего претензий (за исключением антенны на приемнике наземки).
Больше всего огорчился изза futaba
Полет начинался по диагонали (на видео видно удаление от «дома»)
Naza же блокирует винты, если их остановить, верно?
Мы используем Arducopter: там можно просто сбросить газ, и коптер будет падать, пока пилот снова не поднимет throttle или не включит режим автопосадки.
Насчет времени висения в воздухе: ходит информация, что чем больше диаметр пропеллера, тем выше подъемная сила. C винтами 17x6 люди летали по часу.
Блокирует, не дает запустить их снова если коптер в это время «болтается».
Если просто бросить газ, коптер может перевернуть и начаться неконтролируемое падение, вывести его из такого пике крайне сложно.
Насчет больших винтов тоже верно, но обратная сторона медали в том, что такой коптер хуже чувствует себя на ветру (возрастает парусность). Также потребуются более мощные двигатели и возможно аккумуляторы с более высоким напряжением.
Ага, точно:)
1. Чтобы не переворачивался, достаточно понизить центр тяжести.
2. Парусности не добавится. Понизится устойчивость, но это другое, с этим хорошо борются современные мозги на ARM'ах.
3. Понадобятся аккумуляторы с более низким напряжением. Догадаетесь, почему?:)
1. Смотря о каких тяжестях мы говорим! если 10-15кг, то такой аппарат сумеет перевернуть разве что ураган. Легкие (до 3-х кг) легко переворачиваются ветром 5-6 м/с (имеется ввиду режим падения а не полета)
2. Мозги могут бороться хорошо, главное чтобы за ними успевали регуляторы и моторы
3. Могу попытаться, повышаем KV моторов = уменьшаем напряжение, уменьшаем KV = повышаем напряжение. В каждом случае все будет индивидуально (повысить/понизить напряжение, увеличить/уменьшить пропеллеры)
1. Вообще да, крестовидные коптеры должны переворачиваться… Добавлю к достоинствам нашего проекта, что он не теряет ориентации при убирании газа.
3. Да, всё дело в kV, точнее в достаточной пульсации затвора, которая даст необходимый крутящий момент без сильного разогрева обмотки.
Не понимаю пока, чем именно. Балансировка по весу и по парусности не совпадает совершенно: спереди — подвес с кучей плоскостей, сзади — две компактные батарейки…
Как раз вчера запускал вот такое — чудо с камерой GoHero3, продавец уверял, что высота полета чуть ли не до 3-х километров, по факту и 500 метров нет, начинается потеря связи, при том, что запускали не в городе и помех не было. Хочется конечно 1-1.5 км и покрутить вокруг оси, поснимать…
по фантомам разные данные, некоторые уверяют в дальности 1км, производитель заявляет 300м, в среднем по больнице метров — 500
На фантом, можно установить другую аппаратуру, но слабо вериться что он может подняться на высоту в 1км
Штатная батарея — 10 минут, прибавим вес FPV, время полета сократиться минут до 8.
Вниз на минимальных оборотах, главное чтобы держал горизонт, метров с 200 начинаю прибавлять обороты и плавное снижение, 1.5 минуты скорее с 600 до 100, а на 100 метрах уже рулежка :)
примерно так и получается, а по факту
чтобы комфортно летать нужно минимум 2 комплекта аккумуляторов (это уже 4 батарейки)
моторы и регуляторы необходимо брать по одному в запас
пропеллеры GF 12x4.5 не устроили, пришлось взять carbon 13x4, и хочется попробовать 13x6 и 14x4.7
зарядник лучше брать двухканальный, ватт 400 минимум
на 8 дюймовом мониторе картинка порядком лучше чем на 7 дюймах, монитор надо ставить на штатив
и т.д. и т.д.
стоимость первого комплекта буде высокой, по мере обрастания различным, вспомогательным оборудованием, второй и последующие аппараты будут стремиться к стоимости комплектующих
Не обязательно покупать такие дорогие мозги и такую дорогую аппаратуру. И такие дорогие аккумуляторы :-)
Мне первый коптер стоил около 15 т.р. Т.к. я ооочень нетерпеливый, глаза горят, инструкции и форумы не читают и не слушают советы бывалых, я его ломал об землю 100 раз, поэтому общее количество денег, которое потрачено на данный момент — 40 т.р.
Сейчас у меня фактически коптер той же конфигурации, что был вначале и успешно (3 раза через плече :-) ) летает высоко.
Панорама с 1.3 км: (кликабельно)
Минус дешевых мозгов и дешевого пульта, что с ними надо повозиться изрядно. Но кому-то это ведь интересно.
Откровенно говоря, пока летаю без FPV, хотя комплект лежит. Просто руки пока не дошли.
Страшно, но летаю :-) По GPS коптер удерживает широту и долготу, я жму полный вверх, минуты через 2 теряю его из виду, еще через 2 минуты прекращаю подъем, кручусь на месте-делаю фотографии, потом начинаю спуск, минуты через две можно искать его на небе.
Главное — настроить действия при потере сигнала + передатчик FrSky пищит, когда сигнал управления теряется.
да-да, это стрёмно. Но у меня сейчас не очень удачная самодельная рама Y6: мало того, что она прожорлива, так еще и антенну передатчика видео некуда поставить :-) Надо переделывать в квадрокоптер, по расчетам и летать дольше будет.
У вас стальные… нервы!
Был опыт постройки Y6, на момент постройки знал все минусы этой конструкции, но все равно делал — такое было желание.
После удачных облетов, рама была разобрана, запчасти пущены на квадрики
если что, вес 50г — это без батареи, у меня такая шутка весит примерно 88 грамм с батареей.
надежность при жестких посадках пока не изучал, использую онлайн-сервис gps-trace.com.
Та же история!
Меня тоже предупреждали про минусы, но уж очень мне нравится, как он выглядит в полёте да и вообще необычная конструкция — это прикольно :-) Поэтому у меня это уже второй по счету Y6. Но следующий — точно квадрик, наигрался гексами и Y6, как и вы, наверное.
Вы это к тому, что после таких высот обратно на землю не хочется? :-)
А так вот чуть выше расписал процесс. habrahabr.ru/post/202422/#comment_6993774
есть проблемка при сильном ветре — если коптер не в состоянии противостоять ветру, то при сдвиге более чем на сколько-то метров он меняет позицию удержания.
Про спуск. На случай пике бывают же спассистемы с парашютом слышал (но не видел). Интересно, во что это выливается по цене, весу, сложности конструкции?
PS: всем достижения высот и безопасных полетов! Спасибо за статью.
ИМХО Если он в полете начнет вертеться, то парашют не спасет. Для начала нужно выровнить горизонт, а для этого как выше писали, нужно чтобы успевали справляться регуляторы и сами моторы. Ну а если горизонт выровнился — то нафига тогда парашют?
Насколько я слышал, парашюты применяют, но не для спасения аппарата, а для спасения оборудования, которое он несет, ибо стоимость оборудования может превышать стоимость коптера многократно
Если не лень потом искать коптер то можно полностью высаживать батарейку на подъеме и открывать парашют для спуска. Если конечно парашют будет весить меньше чем батарейка для посадки. Про вариант с парашютом сам давно задумываюсь, но он выходит довольно увесистый.
Как вы думаете, реально ли сейчас сделать коптер который сможет поднять 15 кг. веса и пролететь хотя бы 3-5 км. с FPV? :) Видел в интернете рекламу «доставка коптерами», вот и заинтересовался.
Реально, но очень дорого.
«Доставка коптерами» — наблюдаю за этим проектом, но никаких сдвигов не видно. Ни нормальных летающих аппаратов, ни видео, ничего
Ну можно использовать парашют, который будет замедлять падение, а не полностью заменять спуск на пропеллерах, а пропеллерами только «подруливать», энергоэкономия получится) хотя это просто мысли вслух, я в коптерах не мастер)
Да, парашют будет запутываться в винтах.
Как вариант — что-то типа маленького, но высокого раскрывающегося зонтика, который будет только выравнивать коптер, но не замедлять падение. И Naza для этого непригодна.
Для аварийного спасения парашют вообще непригоден, поскольку бОльшая часть аварий — и по вине пилота, и из-за отказа техники — происходит на столь малых высотах, что пилот не успеет отстрелить парашют до падения, или последний не успеет раскрыться. Я вижу его применение только как в вашем случае: посадить машину без расхода энергии.
Ну а съемочная техника… Если GoPro Black с линзой Ragecams снимает лучше, чем Mark III, так ну ее к черту, эту дорогую технику.
К сожалению, OSD не показывает температуру за бортом (очень интересная информация).
LIpo плохо чувствуют себя при отрицательных температурах, падает токоотдача.
Данный коптер имеет оптимальный сетап, поэтому аккумуляторы не могут сами себя «разогреть» необходима дополнительная термозащита
Первые наброски в ecalc. Затем тестирование на подъемную силу (две банки тушенки), следующий этап продолжительность полета.
Во все тестах моторы, регуляторы, аккумуляторы были холодные, это говорит о том что нет перегрузок (повышение температуры свидетельствует о снижении КПД)
Посмотрите в Google Earth, начиная с какой высоты в вашей широте начинается вечная мерзлота. На Алтае это около 2,5 км, в южных Гималаях — уже 4км.
Ну а ветер на высоте всегда сильный — у него ведь нет препятствий.
Нужно искать снеговые шапки на ближайших горах по вашей широте:) Метод, конечно, не идеальный, но если дать запас в 500-1000 метров книзу, то коптер точно не замерзнет.
На борту коптера стоит камера, которая передает видеосигнал на землю, там он транслируется в очки пилоту и наблюдателям в монитор (посмотрите видео, правый экран как раз видео с наземной станции)
насколько легко через fpv ориентироваться и хотя бы найти точку взлета?
местность для полетов — первое попавшееся поле, или как-то специально выбирали? другими словами, есть ли разница, на каком поле запускать?
Визуально ориентироваться очень сложно (именно поэтому у нас оранжевые куртки)
На помощь приходит OSD, показывает расстояние до дома и направление (ориентацию коптера).
Можно задействовать полетный режим Naza — HomeLock. В этом режиме, неважно где находится коптери как он ориентирован, при движении стика на себя коптер приближается к дому
Ух, затаив дыхание смотрел!
А что там за помехи в эфире появились на обратном пути, потом изображение на гоуПро продало.
Вот бы еще с этой высоты какой-нибудь парашютик сбросить.
Видео синхронизировалось по записи наземной станции, гоупро разбила полет на два файла, и почему то потерялся маленький кусочек видео.
Коптер терял связь с пультом, и пытался вернуться домой, но над головой сигнал терялся практически полностью, пришлось отбегать на 50 метров от точки старта и уводить коптер от «дома», тогда связь восстанавливалась и спуск продолжался в штатном режиме.
На него, слава богу, не требуется разрешение.
Требуется — на любой полёт, даже бумажного самолетика. Но понимая эту абсурдность, вызванную несовершенством законодательства, Госавианадзор закрывает глаза.
Еще можно выучиться на пилота и совершать полёты в уведомительном порядке. Но, поскольку вы не собираетесь пилотировать самолеты, это вроде как и не нужно, и можно просто так получить разрешение. Но сложно и нетривиально:)
У меня несколько вопросов :)
Какой полетный вес у вашей модели?
У вас две 4S батареи просто соединены параллельно?
Как работает OSD, подключается модуль между fpv-камерой и передатчиком?
Можно ли к нему добавить температуру двигателей и батарей?
Есть ли сведения о скорости ветра, например, на основании крена коптера?
Как у вас крепится гоупро и почему «желе» заметно, но только в верхней части полета?
Высота измеряется только по GPS?
Коптер держит положение только по GPS?
Насколько контроллер умный?
Мне недавно подарили AR.Drone — был приятно удивлен его способностью самостоятельно висеть, несмотря на порывы ветра, не терять высоту и направление в маневрах, быстро останавливаться и стабилизироваться, если бросить управление.
В общем, чтобы его не разбить требуется минимальная аккуратность и никаких специальных навыков (в противоположность классическим радиоуправляемым моделям, самолетам и особенно веротолетам).
Полный полетный вес — 2880гр
Две батареи 4S соединенные параллельно
miniOSD ставиться в разрыв между Gopro и передатчиком
К этой OSD ничего не добавить, но можно использовать стороннюю, можно много чего замерять и писать
Ветер также померить нечем, но в верху он присутствует всегда
Gopro закреплена жестко к раме, желе появилось изза резиновой прокладки (чтобы камера не скользила под стяжками) когда уже совсем трясти начало
Высота вычисляется по GPS и баро-датчику, на экране отображается высота по GPS
Коптер держит положение исключительно по GPS
Не знаю, мне с ним поговорить не удалось )
Даже самый умный контролер не спасет от человеческого фактора и технических неисправностей.
Крайне важно выполнять предполетную подготовку (затнуты ли все болты и крепление пропеллеров, заряд аккумуляторов и т.д.)
Умный контролер может помочь пилоту, например, режим полета ATT GPS (применительно к Naza), пилот «зарулился» можно бросить стики и аппарат зависнет в точке, это даст драгоценные секунды, чтобы понять и оценить обстановку.
Контролер будет требовать минимальную настройку аппарата (калибрация аппаратуры, калибрация магнитного компаса) главное внимательно следить за состоянием (сигналов контролера, телеметрии)
У меня контроллер не такой умный, как наза. Но задачи свои выполняет: каждый раз как я разбивал коптер, контроллер ничем даже теоретически помочь не мог: ломался винт, отлетал двигатель, не был верно настроен GPS а я решил потестировать возврат в точку старта, сел аккумулятор и т.п.
Ну, по крайней мере, неловкость в управлении он прощает?
Например, CP-вертолет разбить на взлете — раз плюнуть, он просто может упасть набок, а если взлететь все же удалось — он летит в сторону, это нужно немедленно парировать, а если он к тому же вращается, необходимые действия — совершенно неинтуитивны для начинающего пилота.
Есть разные режимы полёта. Говорю про прошивку, которую использую (megapirateng)
Самый главный — STAB. Мозги держат горизонт, если отпустить управление (высоту не держит). Но коптер несёт по ветру. Если разогнаться и отпустить управление, коптер выровняет горизонт, но продолжит движение по инерции и т.п. В этом режиме очень чувствительный газ. Газ в самом низу — моторы стоят. Газ в самом верху — коптер как только может рвёт вверх. Вертикальную инерция никто не отменял — новичку довольно сложно в таком режиме поймать баланс и висеть, а не скакать лягушкой об землю.
Есть Loiter — если газ в центре и стики отпущены, коптер висит, удерживая высоту и позицию по GPS и барометру, а стики управляют скоростью передвижения вперед-назад, вверх-вниз и т.п. Справляется даже человек вообще без опыта.
Есть удержание высоты.
Для всех режимов доступен режим simple, когда коптер знает, где вы находитесь и как бы он к вам повёрнут не был, при нажатии вперед он полетит от вас, при нажатии назад, полетит к вам.
Конечно есть еще всякие режимы: возврат в точку старта, полёт по маршруту, акробатика.
Единственное, что в STAB летать все равно придется научиться т.к. взлетать/садиться можно только в таком режиме. (не считая полёта по маршруту и возврата в точку старта)
Насколько я понял из комментариев, если двигатель в полёте выключить, то он уже не включится… А движки управляются разом (читай контроллером) или каждый отдельно? Если отдельно, для спуска можно было бы выключить 2 противоположных, а оставшимися притормаживать падение. Или всё равно будет кувыркаться?


{kind=link}
{kind=link}
{kind=link}
{kind=link}
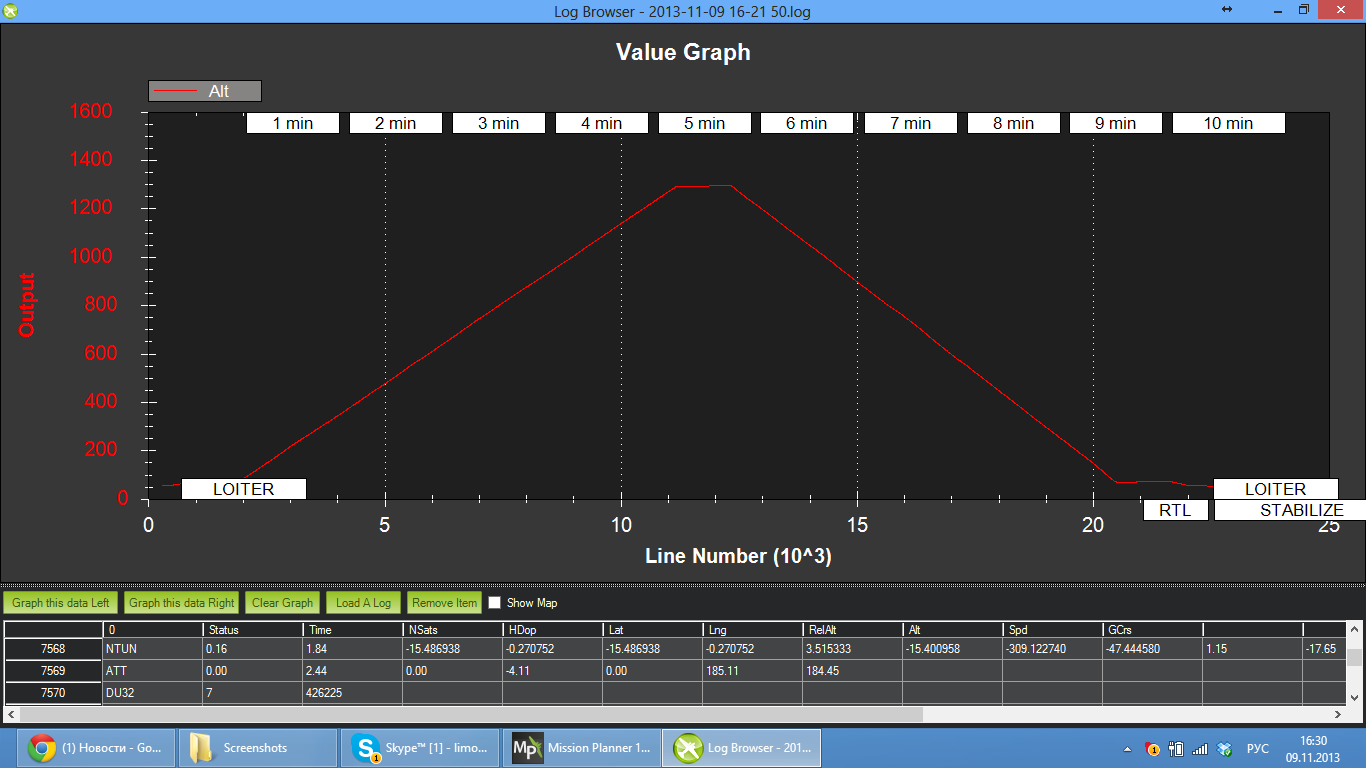
Полет квадрокоптера на высоте 1км