
Всем привет. Довелось мне реализовать интересный проект с применением микроконтроллеров, а именно – оживить подъемные механизмы мишеней для стрелкового тира, вот и решил поделиться результатом своего творения.
Далеко не каждый день бывают такие проекты. Суть заключается в следующем. Имеются четыре подъемных механизма для стрелковых мишеней, и в зависимости от стрелкового упражнения оператор должен управлять подъемом каждой мишени на расстоянии. После того, как мишень установлена оператором в режим готовности, стрелок может производить выстрелы. Подъемный механизм оснащен датчиком удара, с помощью которого фиксируется попадание. Как только датчик обнаружит попадание, соответственно опускает пораженную мишень. Особой сложности в реализации данной задачи нет. Но!..
Как это в большинстве случаях бывает, никакой документации на данные механизмы не было. Сами подъемные механизмы были разукомплектованы, также отсутствовал многожильный экранированный кабель до оператора.
Учитывая то, что мишени могут устанавливаться на дистанцию до трехсот метров, покупка многожильного экранированного кабеля такой протяжённости очень кусается по цене. Оценив плачевную ситуацию, начали искать выход из неё.
Пообщавшись с заказчиком, пришли к следующему. Для управления мишенями без использования каких-либо проводов, идущих к оператору, было решено реализовать дистанционное радиоуправление подъемными мишенями.
Сам дистанционный пульт я хотел изготовить самостоятельно, используя радиомодуль, или купить недорогой готовый радиоудлинитель, подходящий под наши задачи. Но радиоудлинитель, не посоветовавшись, заказчик приобрел сам.

Данный пульт позволяет дистанционно управлять по прямой видимости на расстоянии до 3 000 метров. И это при мощности 10 милливатт передатчика, на частоте 315 Мгц. Данных по чувствительности самого приемника я не нашел, а замерять не было желания и надобности. Как и ожидалось, при испытании данного девайса по прямой видимости уверенная работа составила 150 метров. Но ведь нужно 300! Поколдовав немного с данным устройством и изменив конструкцию антенны (при помощи характериографа X1-50 согласовал и настроил антенну) на четвертьволновой диполь, я смог значительно увеличить дальность работы радиомодуля. Поэтому данный дистанционный пульт и оставили.
После того, как радиопульт удовлетворил требованиям, заказчик захотел оснастить каждую мишень данным пультом для возможности независимо управлять каждой мишенью. Началась дискуссия, нужно ли вообще использовать четыре пульта. С одной стороны, независимое управление каждой мишенью давало ряд преимуществ, но покупка четырех пультов –дополнительная трата денег, к тому же ими неудобно пользоваться. Обсудив, какие стрелковые упражнения будут использоваться, а их, как оказалось, всего три, пришли в выводу, что пульт нужен один – для запуска упражнения или отмены. Все остальные операции возлагались на микроконтроллер.
Стрелковые упражнения:
Первое упражнение:
Три мишени одновременно подымаются с интервалом времени в 10 секунд. Стрелок за отведенное время должен поразить мишени. При поражении стрелком мишень опускается, по завершению отведенного времени оставшиеся непораженными мишени также опускаются. Упражнение закончено.
Второе упражнение:
Три мишени одновременно подымаются с неограниченным интервалом времени (пока не нажмешь отмену упражнения). Как только произойдут попадания во все три мишени, подымается четвертая мишень и удерживается до попадания.
Третье упражнение:
Данное стрелковое упражнение – самое забористое в плане написания программы для микроконтроллера. В стрелковом упражнении участвуют три мишени. Упражнение считается законченным, когда отработали три мишени, причем не обязательно всем мишеням принимать участие, отработать может и одна мишень три раза. Данная мишень поднимется три раза подряд с интервалом времени в 6 секунд, а оставшиеся две и вовсе не принимают участия. Или подняться могут одновременно две мишени с интервалом времени в 6 секунд, затем опуститься. Потом может подняться одна из трех мишеней, при условии, что она не поражена стрелком и т. д. Мишень не подымается только тогда, когда она поражена стрелком. В общем, мишени должны действовать хаотически при каждом новом начале данного упражнения, и по возможности не повторяться подряд. Там еще много разных условий, описывать весь процесс не буду, для этого снял видео, где можно посмотреть как конструктивные моменты, так и саму работу подъемных механизмов в действии. Скажу одно, что повозиться пришлось с написанием программы для микроконтроллера.
Учитывая, что блоки разукомплектованы, решили собирать управление подъемными механизмами на микроконтроллерах. Один блок выполнял роль ведущего, и общался с другими блоками по USART, управляя работой каждого подъемного механизма. Остальные подъемные механизмы были ведомые, и соединялись с ведущим по экранированному кабелю.
Не было надобности в особой скорости передачи данных, поэтому я выбрал стандартную скорость передачи данных 9 600 бит/c. Также на ведущем блоке при помощи тумблера осуществлялся выбор стрелкового упражнения.
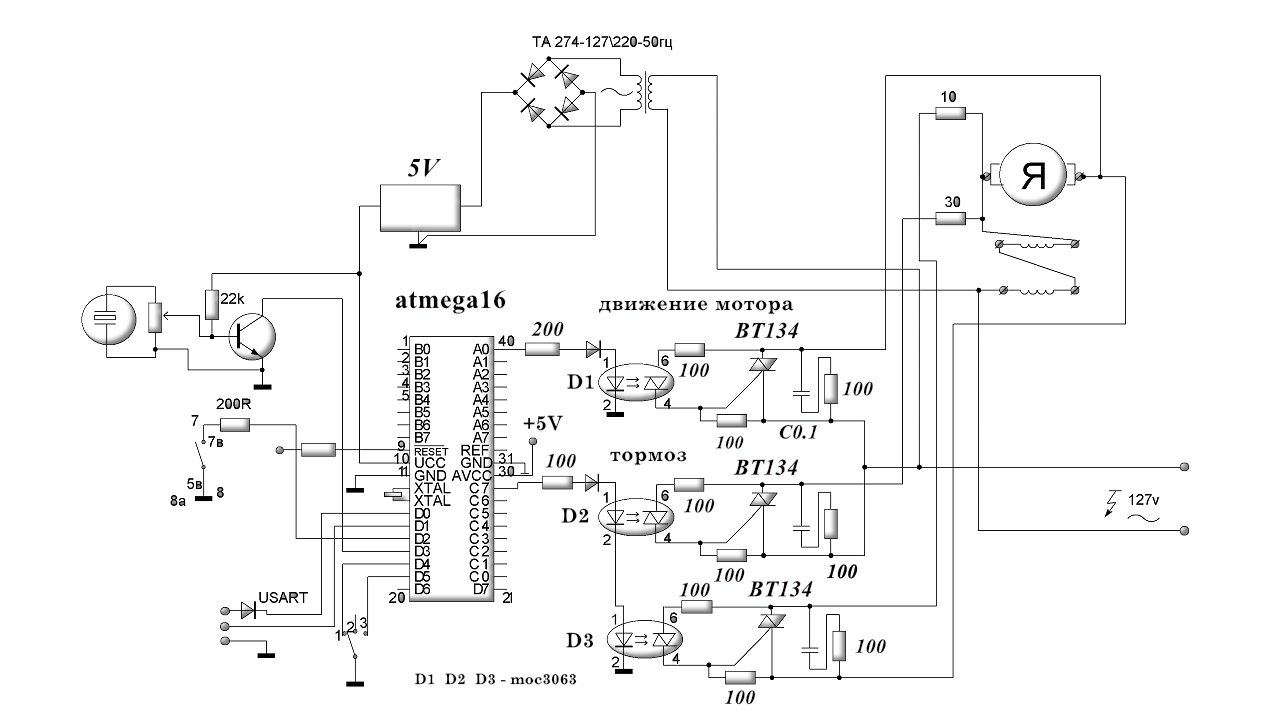
Проблема возникла с управлением коллекторного двигателя с последовательным возбуждением. Конструктивно, подъемный механизм выполнен так, что мишень, нужно остановить в определен момент, не раньше и не позже. Иначе мишень под собственным весом могла наклонится как в перед так и назад, а это уже не хорошо. Просто обесточить коллекторный двигатель оказалось не достаточно. За счет инерции редуктора продолжалось движении. По этой причине, реализовал динамическое торможение коллекторного двигателя. Остановка двигателя осуществлялось жёстко и мгновенно.
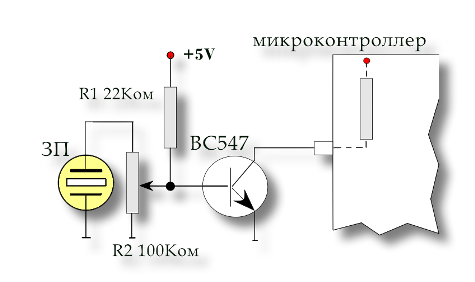
В связи с отсутствием датчиков удара для мишеней, встал вопрос об их изготовлении. Дли изготовления датчика удара использовали пьезодатчик. Подключенный, согласно схеме, к микроконтроллеру датчик весьма неплохо себя показал. Регулируя переменный резистор, можно настроить чувствительность датчика к ударам.
Следующим этапом в построении датчика удара встал вопрос, как их прикрепить к мишеням, ведь мишени на подъемных механизмах будут заменяться. Значит, датчик удара должен легко сниматься с мишени, соответственно, и устанавливаться на неё. Крепление изготовили по принципу струбцины, и закрепили датчик к нижней части мишени. Учитывая, что подъемный механизм будет находиться ниже уровня земли, датчик никак не пострадает от попадания пули.

Более наглядно конструктивные моменты устройства, как и саму работу, демонстрирую на данном видео:

