Хочу рассказать о моем увлечении радио моделями, в частности катерами.
Для управления моторами решил использовать ардуину и готовый пульт для квадрокоптеров. Данный пульт собран с использованием радио модуля NRF24L01, и к тому же один добрый человек раскодировал протокол.
Для начала решил выбрать тип корпуса: катамаран. За основу взял данную картинку:

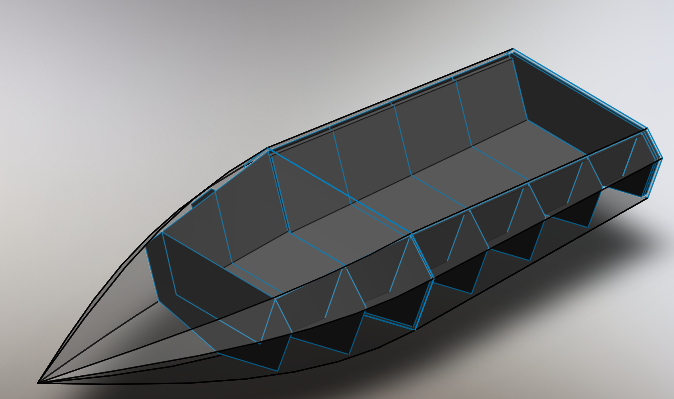
По данной картинке был сделан набросок 3D модели, для того чтобы из нее сделать выкройку в одной замечательной программе pepakura designer:
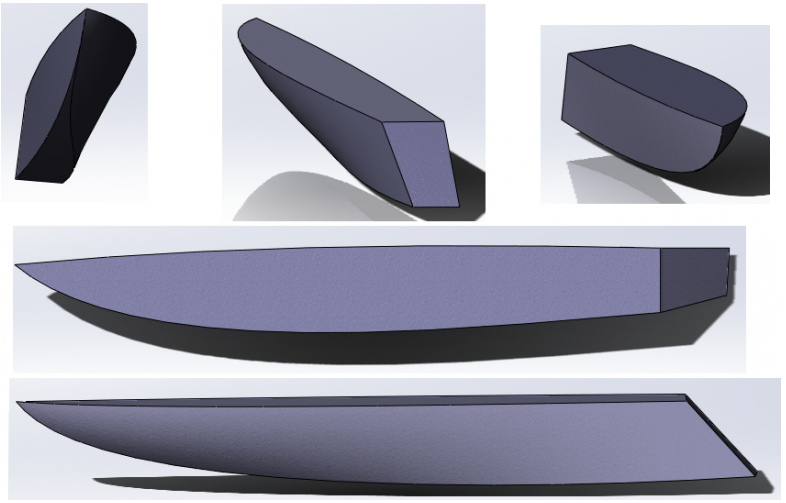
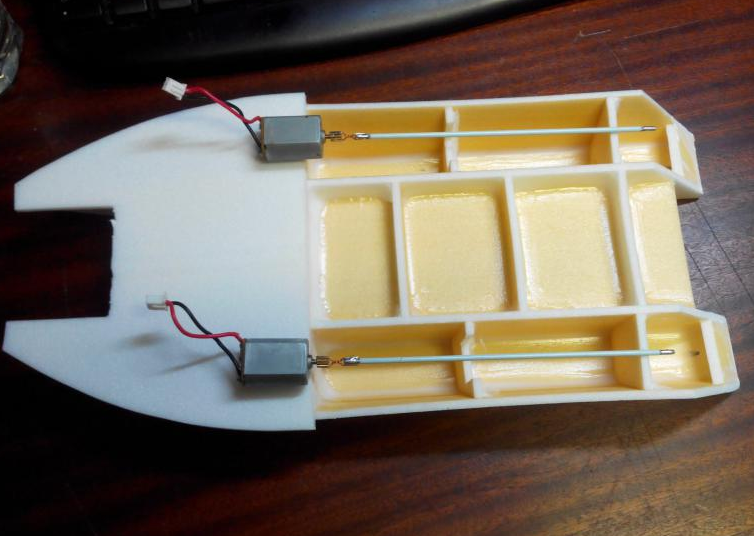
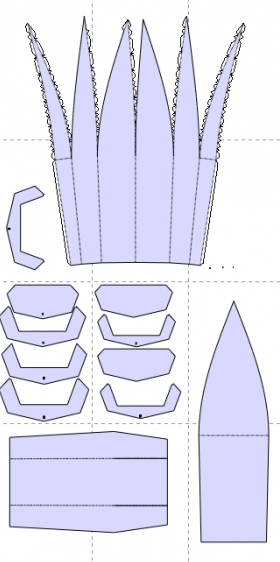
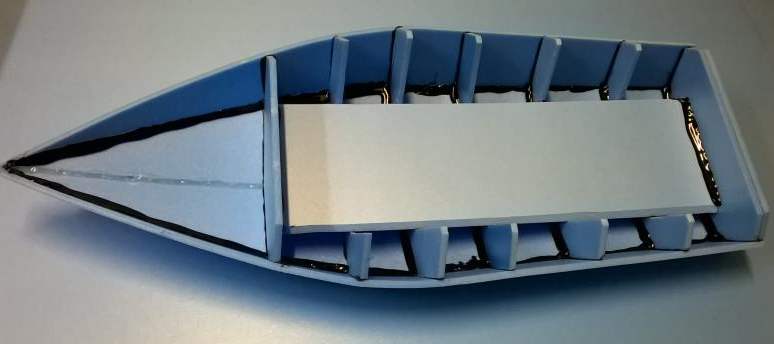
Но конечно программа не смогла сделать нормальную выкройку по моим слишком криволинейным поверхностям. Пока шло мое обучение, какие все-таки должны быть 3D модели, решил делать без чертежей «на глаз»:

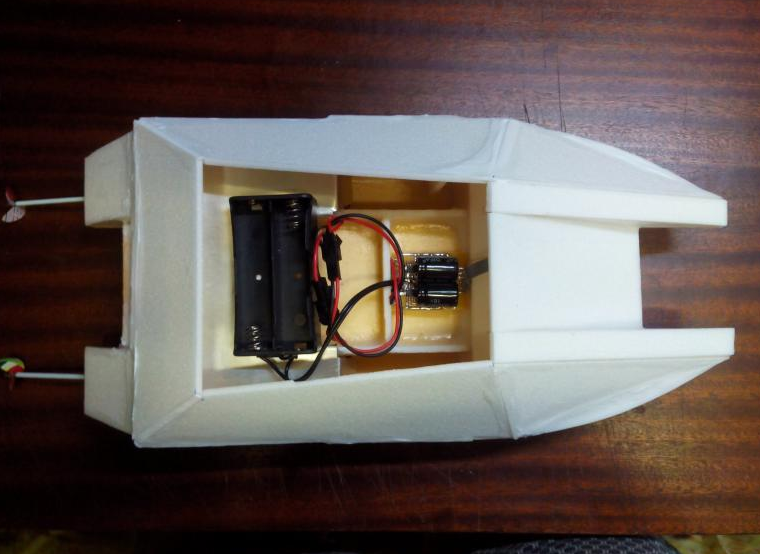
И собственно сама ардуина (самодельная) с драйвером на SI9986:

И конечно видео:
Ни одна уточка не пострадала.
Был выявлен ряд недостатков:
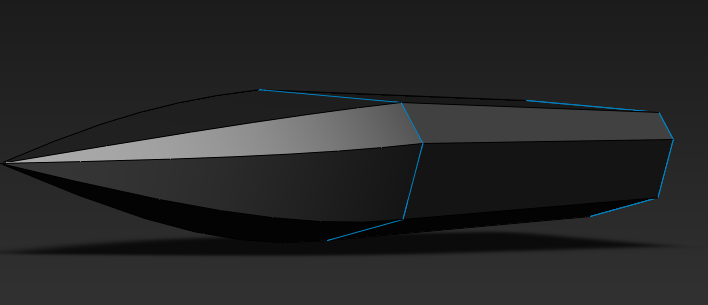
После небольшой работы над ошибками и увеличения опыта в создании «правильных» 3D моделей появилось несколько новых корпусов:

Для следующей модели был выбран самый маленький, который как я ожидал должен был хорошо себя показать.
В принципе я был доволен, но стало ясно что моторы требуется менять на один мощный, а направлением управлять рулем.
Данную модель я не собрал до конца, но научился делать 3D модели для получения выкроек, а также узнал что такое шпангоуты и их назначение.
По данной модели была сделана выкройка:
Также узнал о отличной замене потолочной плитки: подкладка под ламинат.
У подкладки ряд плюсов по сравнению с потолочкой:
А в остальном очень похожи:
Клей использовал Титан, но затем перешел на термоклей, с которым сборка ускорилась в несколько раз.

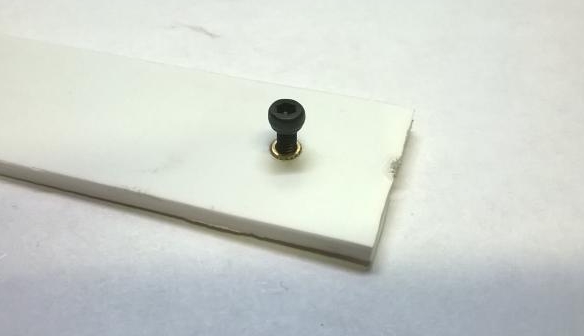
Мотор, руль и вал были куплены магазинные, запчасти от магазинного радиоуправляемого катера. К тому же я научился вплавлять латунные гайки в пластик, и проблемы крепежа двигателя больше не было.
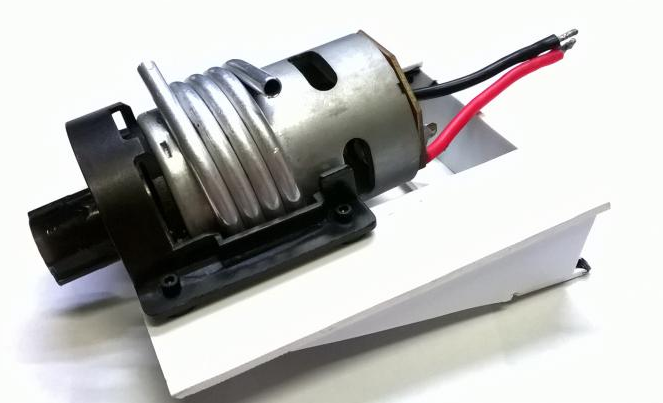

Данный мотор очень прожорлив, и имеет огромный пусковой ток, около 10 А, может и выше. Поэтому я решил сделать драйвер двигателя проще: из 1 полевого транзистора, отказался от заднего хода и упростил разработку платы.
Была разработана, разведена и изготовлена плата управления, состоящая из самодельной ардуины на Atmega328P, радио модуля NRf24L01, драйвера полевого транзистора, нескольких стабилизаторов напряжения. Также плата была протестирована:
Осталось проверить плату с «большим» мотором, и установить в плату, установить сервопривод с обвесом, продумать герметизацию крышки катера и можно будет испытывать на воде.
И конечно делюсь выкройками катеров, с различными габаритами, для желающих собрать:
Катер_v3.1_450х173х85
Катер_v3.1_590х227х112
Катер_v3.1_750х288х142
Продолжение:
Сделал небольшое видео, показывающее все основные этапы сборки катера
Для управления моторами решил использовать ардуину и готовый пульт для квадрокоптеров. Данный пульт собран с использованием радио модуля NRF24L01, и к тому же один добрый человек раскодировал протокол.
1 модель
Для начала решил выбрать тип корпуса: катамаран. За основу взял данную картинку:
По данной картинке был сделан набросок 3D модели, для того чтобы из нее сделать выкройку в одной замечательной программе pepakura designer:
Но конечно программа не смогла сделать нормальную выкройку по моим слишком криволинейным поверхностям. Пока шло мое обучение, какие все-таки должны быть 3D модели, решил делать без чертежей «на глаз»:
И собственно сама ардуина (самодельная) с драйвером на SI9986:
И конечно видео:
Ни одна уточка не пострадала.
Был выявлен ряд недостатков:
- Модель тяжелая.
- Потолочный клей (для пистолетов в виде шприца) тяжелый и размокает от воды.
- Масляная камера с использованием литола (кто-то предлагал как вариант от протечек со стороны вала) справляется плохо.
- Напряжения 1 литиевого аккумулятора явно недостаточно. Требуется как минимум 2S батарея.
- Винты захватывали воздух.
- Драйверы на SI9986 со временем сдохли от перегрузок.
- Двигатели со старого радиоуправляемого вертолета требовал радиатор, так как очень сильно раскалялся.
- Моя конструкция катера была явно неудачная: короткая и высокая.
После небольшой работы над ошибками и увеличения опыта в создании «правильных» 3D моделей появилось несколько новых корпусов:
Для следующей модели был выбран самый маленький, который как я ожидал должен был хорошо себя показать.
2 модель
В принципе я был доволен, но стало ясно что моторы требуется менять на один мощный, а направлением управлять рулем.
3 модель
Данную модель я не собрал до конца, но научился делать 3D модели для получения выкроек, а также узнал что такое шпангоуты и их назначение.
По данной модели была сделана выкройка:
Также узнал о отличной замене потолочной плитки: подкладка под ламинат.
У подкладки ряд плюсов по сравнению с потолочкой:
- Размер листов: 1000 х 500 мм.
- Различная толщина, я купил толщиной 3 и 5 мм, но использую пока только 5 мм.
- Отсутствие различного профиля и картинок.
- Хорошая прочность за счет большей толщины (для 5 мм).
А в остальном очень похожи:
- Малый вес.
- Не боятся воды.
- Низкая цена и доступность.
Клей использовал Титан, но затем перешел на термоклей, с которым сборка ускорилась в несколько раз.
Мотор, руль и вал были куплены магазинные, запчасти от магазинного радиоуправляемого катера. К тому же я научился вплавлять латунные гайки в пластик, и проблемы крепежа двигателя больше не было.
Данный мотор очень прожорлив, и имеет огромный пусковой ток, около 10 А, может и выше. Поэтому я решил сделать драйвер двигателя проще: из 1 полевого транзистора, отказался от заднего хода и упростил разработку платы.
Была разработана, разведена и изготовлена плата управления, состоящая из самодельной ардуины на Atmega328P, радио модуля NRf24L01, драйвера полевого транзистора, нескольких стабилизаторов напряжения. Также плата была протестирована:
Осталось проверить плату с «большим» мотором, и установить в плату, установить сервопривод с обвесом, продумать герметизацию крышки катера и можно будет испытывать на воде.
И конечно делюсь выкройками катеров, с различными габаритами, для желающих собрать:
Катер_v3.1_450х173х85
Катер_v3.1_590х227х112
Катер_v3.1_750х288х142
Продолжение:
Сделал небольшое видео, показывающее все основные этапы сборки катера

