
Навигационные системы используют разные типы навигационных сообщений для модуляции разных сигналов. Например, сигналы GPS L1C/A модулируются сообщением в соответствии с протоколом LNAV, а сигналы GPS L2C и L5 сообщением CNAV.
Протокол определяет размещение данных в фреймах и сабфреймах, интервал передачи, разрядность и т.д.
Навигационный приемник использует навигационное сообщения для разных целей.
Во-первых, передаваемое навигационное сообщение позволяет разрешить неоднозначность кодовых измерений и восстановить сигнальное время.
Во-вторых, передаваемые параметры позволяют рассчитать положение спутника, отличие его шкалы времени от системной, скорректировать псевдодальности и решить навигационную задачу.
В-третьих, принятое навигационное сообщение используется для предсказания символов навигационного сообщения в будущем. Это позволяет реализовать технологию wipe-off, расширить апертуру дискриминационных характеристик и существенно поднять чувствительность слежения.

Возникает вопрос, можем ли мы использовать навигационное сообщение одного типа чтобы решить перечисленные задачи для сигнала с навигационным сообщением другого типа. Например, сообщение L2C для C/A?
Оказывается, в случае с GPS, не совсем. Спутники GPS передают разные значения параметров в разных типах навигационного сообщения. Они соответствуют разным моментам времени toe и toc.
Для начала, дискрет toe и toc в навигационных сообщениях LNAV и CNAV разный. В LNAV мы можем встретить время с шагом 16 секунд, а в CNAV - только с шагом 300 секунд.
Выдержка из ИКД для Legacy NAV:

и для CNAV:

На старых спутниках, например IIR, можно встретить, например, toe = 467984, что не кратно 300 и не может быть напрямую использоваться для формирования CNAV сообщения. Но такие спутники и не содержат сигналов с сообщением CNAV.
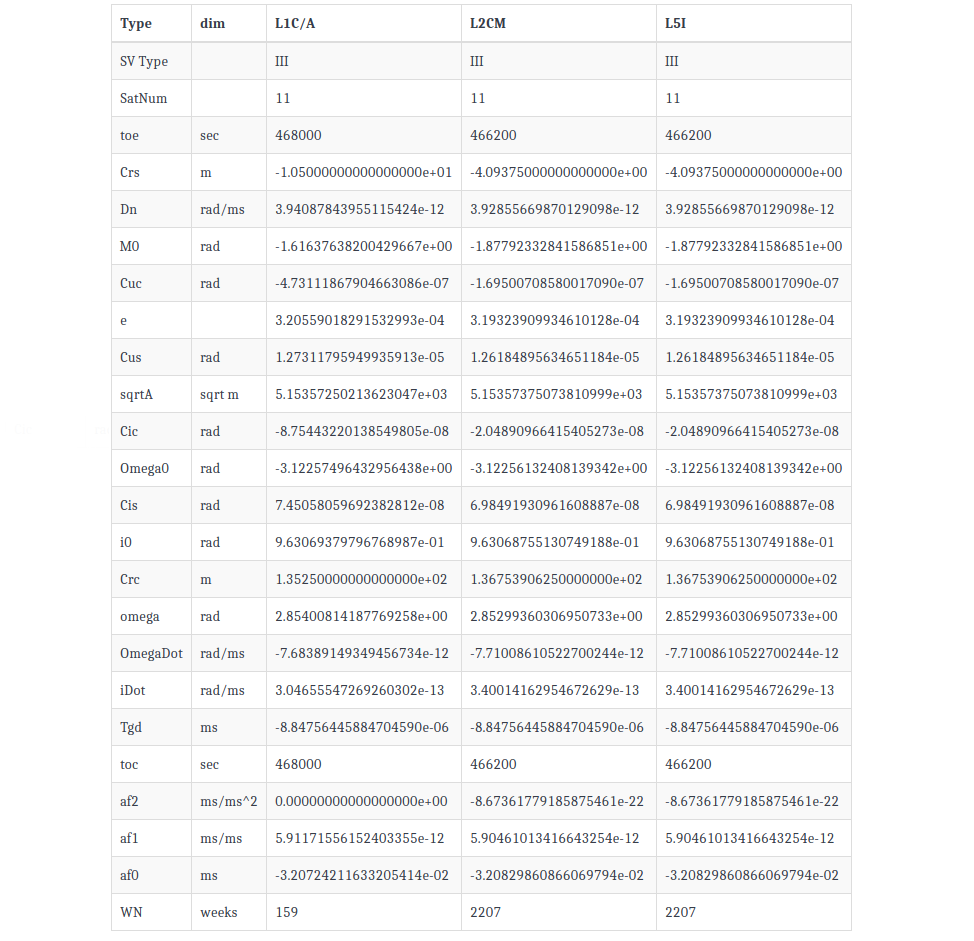
К счастью, на новых спутниках и для LNAV используются значения кратные 300. Но спутники всё равно используют разное время эфемерид для LNAV и CNAV! Обратимся к данным, записанным 29 апреля 2022. Для начала взглянем на спутник IIF с PRN = 6.

Мы видим, что данные в сигналах L2C и L5 совпадают, но отличаются от данные в сигнале L1C/A. Времена эфемерид и клоков отличаются на 30 минут.
Аналогичная картина, если мы обратимся к самым современным спутникам - BlockIII:
Может быть мы можем хранить один набор эфемерид и пересчитывать их на разные toe и toc? Для задачи позиционирования - да, но для wipe-off это не подходит. Есть параметры, такие как Crs, Cus и т.д., для которых в сообщении не заданы производные.
Можем попробовать экстраполировать af0, но точность такой экстраполяции окажется недостаточной:
dtc = LNAV.toc - CNAV.toc; toc = CNAV.toc + dtc; af1 = CNAV.af1 + CNAV.af2 * dtc * 1000; af0 = CNAV.af0 + af2 * dtc * 1000;
результат будет близок к af0 в сообщение LNAV, но все же отличаться на 3 см. В сообщении же дискрет представления af0 8 мм, мы не получим bit-accurate совпадения.
Выводы:
В LNAV и CNAV со спутника могут передаваться разные данные
Для реализации wipe-off необходимо использовать эфемериды, переданные сигналом с тем же типом навигационного сообщения. Для решения навигационной задачи можно ограничиться хранением одного набора данных.

