
1. Введение
«…a long time ago, in a Galaxy far, far away…» – конечно, а где же еще найти подходящий пример сети промышленной автоматизации, если не в «одной далекой-далекой Галактике»? Собственно говоря, с этой точки зрения, нас будут интересовать вовсе не столь положительные герои, как, например, джедай Люк Скайуокер или его коллеги и сэнсеи, отважно превращающие именными световыми мечами в дымящийся фарш (ну, или металлическую стружку) коварных злодеев и их дроидных сподвижников, ни уж тем более сами «резко отрицательные» представители «темной» стороны, особенно персоны, сопящие с астматическим присвистом в черный космический противогаз. В нашем случае на передний план выходит бесстрашный авантюрист (читай – прохиндей еще тот!), бывший пират и контрабандист, при этом ставший впоследствии генералом Новой Республики, смелый и отчаянный капитан космического корабля «Millennium Falcon» (буквально в отечественных источниках – «Тысячелетний Сокол») Хан Соло. Собственно говоря, в рамках данной работы следует вообще-то больше обратить внимание на сам корабль. Еще точнее – на его знаменитые модификации, реализованные при участии капитана Соло и его старпома Чубакки.
2. Объект автоматизации: краткий обзор и не менее краткий исторический экскурс
Следует напомнить, что «Millennium Falcon», корабль-фрахтовик производства «Коррелианской Инженерной Корпорации» («Correllian Engineering Corporation» – «CEC»), некогда принадлежал контрабандисту Лэндо Калриссиану и был выигран у последнего в сабакк (кто не знает – в карты то есть – не в домино же) капитаном Соло. Хан уже к тому времени совершил свой первый облет Дуги Кесселя и был хорошо известен в определенных криминальных и не очень кругах. Корабль неоднократно перестраивался и модифицировался как самим Лэндо, так и позже Соло (в общем-то, понятно для каких целей) – и, как результат, не смотря на весь свой изношенный и залатанный вид, приобрел славу одного из самых маневренных и скоростных кораблей в Галактике. Перечисление всех планет и звезд, не говоря уже о передрягах и авантюрах, в которых побывал «Тысячелетний Сокол», благодаря своему экипажу и пассажирам, безусловно, не имеет смысла и выходит за рамки данной работы, тем более что все они наиподробнейшим образом задокументированы в тоннах глянцевых публикаций и километрах кинопленки.
«Сокол» был построен примерно в 60 г. до Явинской Битвы на Кореллии и представлял собой типовой фрахтовик класса YT-1300 заводской модификации «f». В то время модель YT-1300 была очень популярна в криминальных кругах, поскольку легкий грузовой корабль обычно не вызывал подозрений у правоохранительных органов. При этом если все же патруль корпорации безопасности выявлял провозимую на борту контрабанду, то, благодаря достаточно мощному двигателю, YT-1300 часто удавалось уйти от преследования. Кроме того, эта, на первый взгляд, абсолютно гражданская, предназначенная для грузо-пассажирских перевозок продукция «СЕС», выгодно отличалась от аналогов конкурентов модульной конструкцией, которая после нескольких легальных (или не совсем легальных) модификаций дотягивала до статуса боевого корабля при минимальных капиталовложениях.
Как и любой другой объект данного класса, YT-1300 казалось бы невозможно представить без высокотехнологичной системы комплексной автоматизации, которая должна обеспечивать решение широкого спектра задач, включая такие, например, как удаленное управление и мониторинг объектов системы, формирование комфортных условий работы экипажа, эффективный расход средств жизнеобеспечения, контроль доступа в технические помещения, охранно-пожарные мероприятия и многое другое. Очевидно, что использование единого интегрированного подхода в решении поставленной задачи реализации платформы распределенной системы управления процессами является залогом успеха. В отличие от консолидации набора автономных систем, использующих оборудование разного поколения нескольких производителей и, соответственно, неодинаковые протоколы, единая и масштабируемая платформа, обеспечивает гибкое объединение и управление подсистем функционально различных процессов, осуществлять оперативную маршрутизацию информационных и управляющих потоков данных между локальными и центральным узлами управления, в том числе и за пределы конструкции объекта, легко наращивать возможности развернутого комплекса и многое другое.
Увы, вышесказанное совершенно не относится к YT-1300: как известно, «CEC» успешно конкурировала на галактическом рынке кораблестроения во многом благодаря большому числу талантливых инженеров, объединенных в предприятия корпорации, а также хорошо налаженным коммерческим связям с ведущими компаниями (например, Girodyne, Quadex и пр.), многие годы специализирующихся на производстве отдельных модулей, начиная от фрагментов корпуса и заканчивая уникальной IT-начинкой. Пилотная инсталляция агрегатов и функциональных узлов, а также пуско-наладочные работы подсистем управления осуществлялись еще в цехах указанных предприятий, а сборка конструкции, установка компонентов и подключение к бортовой сети – на главной верфи корпорации силами тех же «командированных» технических специалистов. Понятно, что в зависимости от назначения и области применения того или иного субмодуля, а также благодаря наработанным за долгие годы сотрудничества связям между предприятием и производителем компонентов систем автоматизации, предпочтение отдавалось вполне конкретной технологии, часто не совпадающей с выбором соседа по корпорации. В результате получилось – что? – правильно, типовая распределенная сеть управления – отлаженная и полноценно функционирующая в рамках поставленной задачи, но, тем не менее, представляющая собой (да простит нас Чубакка!) IT–зоопарк.
Мы намеренно не приводим подробное описание всех подсистем YT-1300 – это, безусловно, выходит за рамки данной работы: только перечисление наименований займет несколько страниц текста. Поэтому ограничимся несколькими условными примерами на обобщенной структурной схеме, соответствующей типовой распределенной сети управления системы промышленной автоматизации, характерной не только для рассматриваемого объекта, но и целого ряда предприятий, организаций и компаний. Напомним, что подобные сети обычно представляют собой иерархическую структуру, состоящую из трех уровней. Первый, нижний уровень – Device Level – традиционно обозначается как FieldBus (полевая шина). Основным назначением данного уровня является обеспечение обмена информацией в реальном времени между полевыми устройствами (датчиками, измерителями, исполнительными механизмами) и устройствами более высокого уровня – программируемыми логическими контроллерами (ПЛК). Скорость обмена данными обычно составляет сотни Кбит/с, но в зависимости от выбранной технологии может достигать более 10 Мбит/с. При этом, с учетом требований, предъявляемых для реализации режима реального времени, время цикла не должно превышать 10 мс. Именно поэтому на нижнем уровне сети применяются специализированные протоколы: например, Profibus, CAN, Foundation FieldBus и др. Следующий уровень сети промышленной автоматизации Control Level является уровнем управления. На этом уровне функционируют ПЛК, технологические автоматизированные системы диспетчерского управления SCADA, распределенные системы управления DCS и разработанные на их основе АСУТП. Типовое время цикла на этом уровне не должно превышать 100 мс, однако современные системы в ряде случаев предъявляют более жесткие требования, уменьшая значение этого параметра в два и более раза – до 50 мс и менее. Взаимодействие между нижним уровнем и уровнем управления сети осуществляется с помощью параллельной или последовательной схемы коммутации. В первом случае, каждый отдельный порт ПЛК с помощью соответствующей направляющей системы (медный провод, оптическое волокно) соединяется с отдельным преобразователем датчика или механизма. Данная схема требует монтажа большого количества физических линий, что существенно увеличивает объем работ при инсталляции сети и значительно усложняет ее эксплуатацию. Поэтому подавляющее большинство сетей нижнего уровня систем промышленной автоматизации для взаимодействия с уровнем управления используют последовательную схему коммутации. Такая схема функционирует на основе последовательного канала обмена данными, реализуемого с применением топологии общая шина, кольцо, звезда. Наконец, Corporate Level образует сеть верхнего уровня, которая является основой для построения систем управления с распределенной схемой организации вычислительных процессов. Фактически, в настоящее время на этом уровне доминирует технология Ethernet. Активно внедряются системы, соответствующие стандарту IEEE 802.3ae (10 GbE). В стадии разработки находится стандарт IEEE 802.3ba, который поддерживает сразу две скорости передачи данных 40 и 100 Гбит/с. Область применения 40GbE – передача данных между высокопроизводительными серверными кластерами сети хранения данных (SAN – Storage Area Networks). В свою очередь, 100GbE предполагается использовать на магистральных узлах коммутации, для поддержки маршрутизации и агрегации данных в вычислительных центрах.
Для описания базовой распределенной сети управления системы автоматизации YT-1300, которая, как уже упоминалось выше, использует несколько специализированных протоколов сетей низшего уровня, предлагается выделить четыре условных группы систем. Каждая группа включает в себя набор подсистем, условно реализованных с применением того или иного протокола полевой шины, соответствие между которыми сведено в табл. 1.
Табл. 1.

Сначала рассмотрим группу «1» систем управления инфраструктурой и жизнеобеспечения (рис. 1).
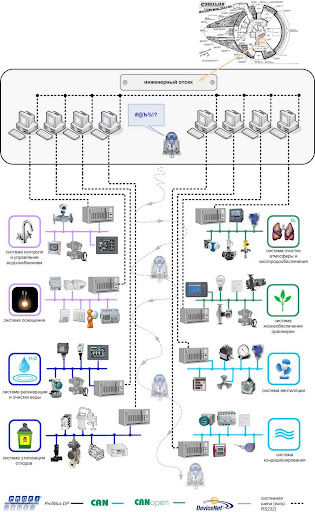
Предположим, что подсистемы управления сегментов инфраструктуры объекта, входящих в группу «1», в базовой комплектации YT-1300 предполагают объединение в общую низкоскоростную сеть верхнего уровня (например, на основе системного протокола RS232). Каждая из них построена на базе промышленного компьютера и соответствующего ПЛК, процессорный модуль которого обеспечивает логические и технологические функции управления, а программное обеспечение (ПО) ПЛК – последовательное управление исполнительными элементами системы в соответствии с заданным режимом работы. Программирование контроллера осуществляется с помощью программного комплекса, установленного на компьютер (PC), который может быть подключен к ПЛК через соответствующий интерфейс (например, RS232). Мониторинг функционирования системы выполняется оператором по результатам анализа данных, отображаемых на мониторах ПК инженерных (операторских) станций, централизованно размещенных в техническом помещении (в данном случае, согласно чертежам YT-1300, регламентированным «CEC» – в инженерном отсеке). Аналогичным образом данные также могут быть сняты персоналом непосредственно с панели пульта оператора (эту рутинную должность «обходчика» в нашем случае можно поручить одному из неунывающих дроидов – например, знаменитому R2-D2). Управление технологическими процессами осуществляется как дистанционно с помощью ПК инженерной станции, так и с пульта оператора.
К сожалению, нужно остановиться. Материала слишком много, в рамки одного поста он не помещается. Полный текст статьи лежит здесь.
Авторы:
- Идея и реализация: Бурдин Антон
- Несколько идей и горячее обсуждение: Shopin
- Консультант: Сидоров Артем
P.S. Да, а при чем тут Softing, спросите вы. Спасибо за вопрос! Об этом в статье.
P.P.S. Траву авторы не курили, по вопросу приобретения просьба не обращаться.

