
Cпустя день после публикации статьи Explorer-1 (Мой «Спирит») я принялся разрабатывать следующую версию аппарата. По советам хабраюзеров, наметил, что необходимо добавить в Explorer-2:
1. Двусторонняя связь.
2. Камера
3. Дублирующиеся датчики.
4. Больше датчиков.
5. Вменяемый корпус.
6. Спящий режим.
7. Источник питания посерьёзнее захудалой «кроны».
Я рассчитывал всё это сделать за пару недель. Однако, в итоге разработка с нуля заняла целый месяц. Слишком много подводных камней выявлялось при каждом шаге.
Первым делом были приобретены необходимые датчики и комплектующие: Аналоговый термодатчик LM335Z, цифровой температурный датчик DS18B20, цифровой датчик температуры и влажности DHT11, фоторезистор VT93N1, датчик атмосферного давления BMP085 от фирмы Bosch, привод камеры — MG-90S.
1. Двусторонняя связь.
Это самый главный пункт, отличающий 1-ю версию от 2-й. Без двусторонней связи, управлять аппаратом по определению невозможно, а полностью полагаться на автоматику рискованно.
Первым делом, я наладил связь между двумя Ардуинами

В теории это легко. Но на практике оказалось, что ардуина не обладает многозадачностью. То есть, одновременно принимать и отсылать данные она не может, каждый процесс надо вести отдельно. Выходом из ситуации оказался тайм-аут. Аппарат ждёт 7 минут поступления команды и, если она не поступила, отсылает свои данные (вот и пригодилась та самая задержка между «Марсом» и «Землёй»).
Аппарат отправляет данные в следующем виде:
1-я строка : /температура с аналогового термодатчика/влажность/температура с цифрового термометра
2-я строка : /температура с DHT11/давление/напряжение, поступающее на МК (микроконтроллер)
Принимать он может команды в виде байтов в кодировке ASCII, которые мы вводим в терминал как буквы (например, английская «P» принимается как 80). Список команд формировался по ходу разработки:
P — поворот панорамной камеры.
D — температура, считываемая с датчика внутри МК.
R — программная перезагрузка.
1 — открыть защитную крышку (не использовалась)
2 — закрыть защитную крышку (не использовалась)
2. Камера
С основной проблемой разобрался. Теперь стал вопрос, какую камеру использовать? Телефон, связанный с пк по Bluetooth/WiFi разрядится очень быстро. Поэтому, я решил использовать USB-веб камеру Presrigio.

Да, она проводная. Однако, телеметрия передавалась всё равно по радио, так что «жульничеством» это не считаю. Видео захватывал через Debut Video Capture.
Камера была посажена на сервопривод и могла поворачиваться на 180 градусов, чтобы снимать панорамы.

3-4 — Датчики
По сравнению с предыдущей миссией, этот аппарат обладал гораздо большим количеством датчиков. Правда, в конечном итоге закон «от идеи до реализации функционал сокращается» внёс свою лепту — я посчитал ненужным датчик наклона, газа и тепла. Датчик температуры был продублирован трижды.
5. Корпус
Картонная коробка — это в каком-то смысле удобно, но несерьёзно. С металлом я не особо дружу, а вот с деревом работать привычнее. Определившись с размерами, выпилил из куска фанеры вот такую коробку


В ней самой проделал отверстия под привод камеры и датчики.
6. Спящий режим
Для экономии энергии был введён спящий режим. Он реализовывался так: когда на фоторезистор падало мало света, аппарат прекращал программную работу (прокручивался пустой цикл). Когда света достаточно, аппарат функционировал.
На фото сам фоторезистор

7. Питание
Аппарат питался от шести пальчиковых батареек Duracell Power Check, дававших в сумме 9V.
Всё это дело я запаковал, протестировал, и в итоге получилось вот такое:



Запуск
Перед самим запуском вдруг перестала работать связь. Диагностика показала, что неполадки кроются в цифровом термометре. Не было ни времени, ни сил с ним копаться, так что я его просто вырезал, как аппендицит. Так же, я посчитал ненужным элементом защитную крышку, накрывавшую датчики, так что её тоже убрал.
Гарантия работы аппарата — 2 дня (по предыдущей миссии). Работа была запланирована на 5 дней. Цель — составить погодные графики «Марса» и снять панорамы поверхности.
Как только всё было улажено, Explorer-2 отправился в путь — на подоконник.
Хронология полёта
День 1 (17.04)
Explorer-2 успешно приземлился. Первым делом были получены следующие данные — температура окружающей среды 15С, температура внутри корпуса 20С, влажность 39% и атмосферное давление 101619 Па. Так же был снят первый кадр с поверхности «Марса»:

Спустя несколько минут была заснята первая панорама (панораму в более высоком разрешении смотреть тут):

Панорама делалась на основе видео, захваченного с камеры в момент движения.
Связь с аппаратом поддерживалась не всегда. Я считывал данные «сеансами».
Где-то в 20:40 в терминал пришло оповещение о том, что Explorer перешёл в спящий режим:

Так и закончился первый рабочий день. Проблем не возникло никаких, прям удивительно.
День 2 (18.04)
Панорама прошлого дня была заснята вечером, теперь мне захотелось сделать утреннюю. После считывания телеметрии я отдал команду на съёмку панорамы.
(Смотреть в более высоком разрешении)

Вообще, всё работало настолько гладко, что было даже немного скучно. Всего-то подходи и забирай данные. Хотелось каких-то интересных ситуаций. И они, не заставили себя долго ждать.
Весь день я записывал показания. В конце дня, после ухода аппарата в спящий режим, усреднял и заносил в таблицу:

День прошёл без сбоев. По идее, на следующий истекает гарантия работы аппарата (Explorer-1 погиб через 2 дня). Протянет ли вторая версия? Во всяком случае, заряд батареи за день не сильно уменьшился и повода для беспокойства не было.
День 3 (19.04)
Начал считывать телеметрию утром. Меня ждал сюрприз — напряжение на контроллере упало на 0,5В. Аналоговый датчик начал так же наращивать температуру, что свидетельствует о разряде(неполном) батареи. Датчики выдавали не соответствующие действительности показания. Чтобы их нормализовать, я провёл перезагрузку аппарата. Через несколько минут всё пришло в норму. Стало ясно — надо экономить энергию. Поэтому, панорамы я не снимал и никаких команд аппарату не присылал. Только считывал показания.
Через пару часов новь подключился к аппарату. поползла телеметрия, но тут бац… и оборвалась. Попытки установить связь провалились. Аппарат передал предсмертные строчки:
/89/49
/22/101790/4417
Последний снимок:

И умолк. Навсегда.
Вскрытие показало, что батареи разрядились.
Explorer-2 после завершения миссии

Было с одной стороны обидно, а с другой радостно. Обидно потому, что были планы на 5 дней, Хотелось получить более точные данные, приладиться к панорамам.
Радость же заключалась в том, что он отработал больше гарантии (3,5 дня). Работал он гораздо стабильнее своего предшественника. У меня получилось сделать то, что я хотел. Все поставленные задачи были выполнены.
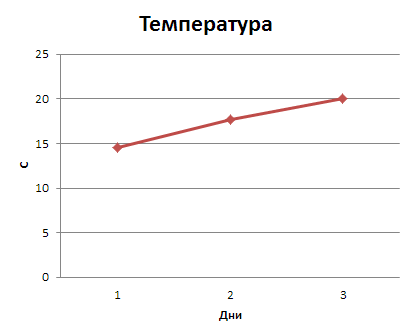
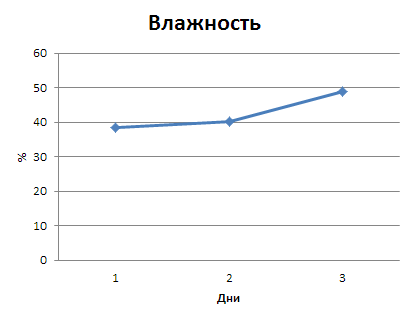
По результатам работы Explorer — 2 были получены следующие графики:

Что же дальше?
У меня есть два пути:
1. Разработка Explorer — 3
2. Сооружение симулятора кабины космического аппарата
Путь первый
Облик Explorer -3 у меня уже вырисовывается. На этот раз, аппарат будет оборудован сверлом для бурения почвы (аппарат будет на земле) и спектрометром, для анализа химического состава атмосферы и образцов, доставленных через сверло. На самом деле, спектрометр — не такая и сложная штука. Дифрацкионную решётку я уже приобрёл, а дальше дело за малым — надо сделать камеру из однородного материала и оборудовать её, к примеру, зажигалкой, чтобы сжигать образцы и анализировать спектр.
Но, своё предпочтение я отдаю второму пути.
Путь второй
Многие знают, что космонавты перед полётом тренируются на специальном тренажёре-копии настоящего аппарата. То есть, симулируется настоящий полёт. Оптимальным решением я выбрал кабину американского аппарата «Меркурий». Она одноместная и несложная по устройству, так же, известен набор функций и устройство панели управления. Я не знаю, что выйдет в конечном итоге, но должен получится как минимум симулятор орбитального полёта. Будет воспроизводится тряска от двигателей, панель контроля, ЦУП и т.д. Я уже изучаю детали полётов «Союзов», чтобы постараться максимально повторить процесс. Сама кабина будет симбиозом — что- то я возьму от «Меркурия», что-то от «Союза». Если всё пройдёт гладко, то будет добавлена стыковка с МКС, благо, осуществить это хоть сложно, но реально (в общем, не полечу в настоящий космос, так полечу в свой).


Постройку кабины начинаю с июня. Надеюсь, осуществить всё задуманное получится.

