Всем привет. Уже давно появился способ программировать маленькие, дешёвые, экономичные к питанию и доступные микроконтроллеры ATtiny13A.
Вот собственно всё то что ниже, только в видео формате:
Сегодня расскажу, как я зашиваю Arduino'вские скетчи в ATtiny13A.
Итак, для начала нам нужно скачать вот этот архив (взято и совсем чуть-чуть доделано отсюда), положить файлы по адресу "\Documents\Arduino\hardware\". Должно получится что-то типа «C:\Users\Администратор\Documents\Arduino\hardware\attiny13\avr\cores\core13».
Перезапускаем Arduino IDE если она запущена на данный момент, это нужно для того, чтобы среда добавила новый микроконтроллер в список плат.
Обязательно проверяем, правильно ли у нас выбрано «расположение папки со скетчами» (посмотреть можно во вкладке «Файл/Настройки»):
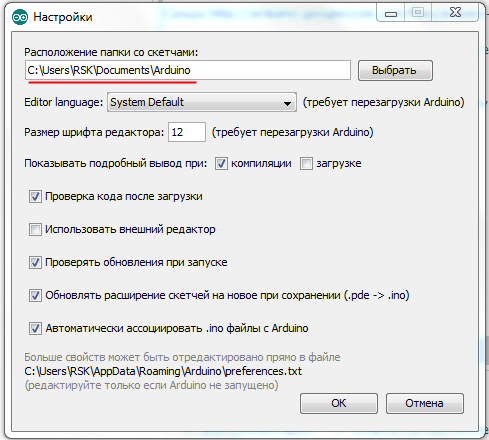
Туда нам будет нужно распаковать архив с ядром для ATtiny13.
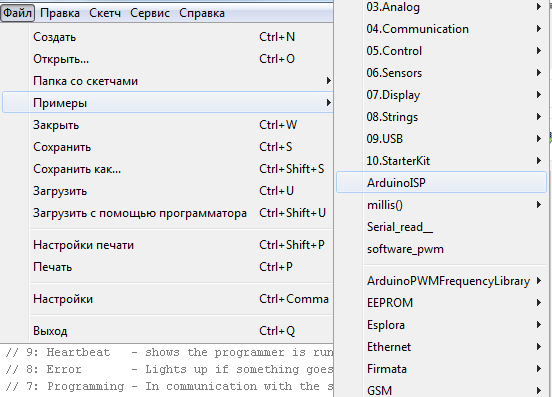
Теперь прошьём в дуинку ArduinoISP из примеров Arduino IDE:
Потом подключаем ATtiny13 к Arduino, как показано на картинке:
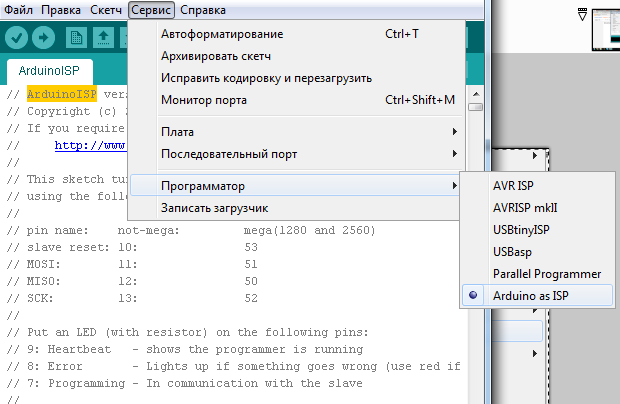
Потом нужно изменить тип программатора на Arduino as ISP, как показано на скриншоте:
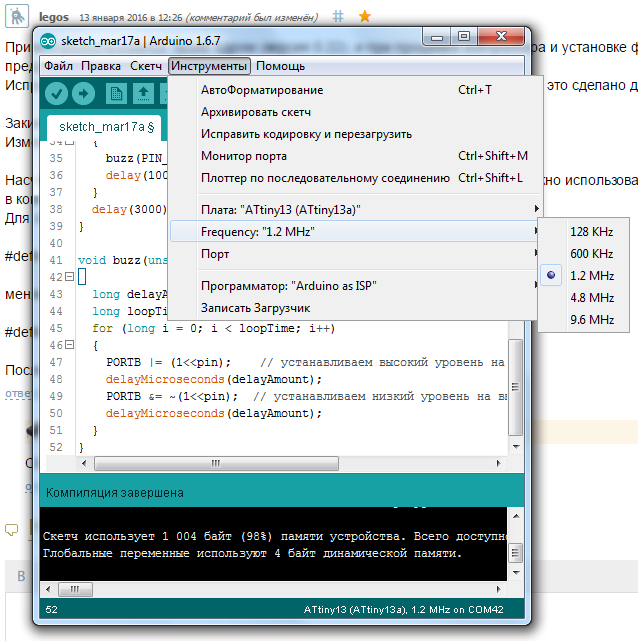
Теперь мы можем выбрать, на какой частоте может работать микроконтроллер ATtiny13.
С завода ATtiny13 работает на частоте в 1.2 МГц, то есть микроконтроллер тактируется от внутренней RC- цепочки на частоте в 9.6 МГц и включён делитель на 8, поэтому я указал частоту в 1.2 МГц как дефолтную:
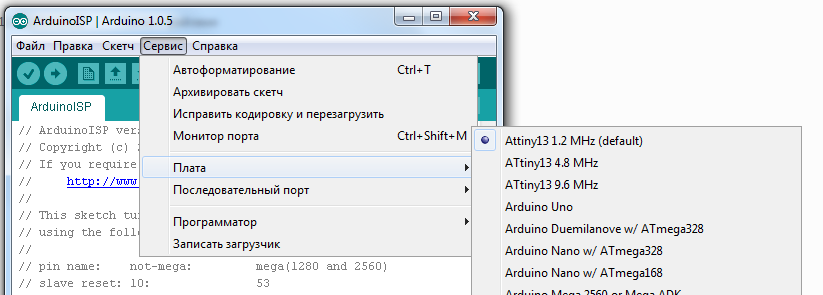
Как видим, доступные частоты — 1.2 МГц, 4.8 МГц и 9.6 МГц. Для изменения частоты нам нужно нажать на кнопку «Записать загрузчик», которая располагается в вкладке «Сервис».
Что же среда делает при нажатии на кнопку «Записать загрузчик»?
Arduino IDE в данном случае просто выставляет нужные фьюзы микроконтроллера.
К примеру, мне нужно, чтобы ATtiny13 работал на частоте в 4.8 мГц, я выбираю нужную мне частоту и только один раз жму кнопку «Записать загрузчик» — всё. Теперь микроконтроллер будет всегда работать на заданной частоте, если будет нужно изменить частоту опять — проделываем описанную выше процедуру.
Сразу скажу, что рост частоты приведёт за собой рост потребления контроллера, чем чаще переключаются транзисторы в микроконтроллере тем больше он потребляет.
Для каких-то там мигалок, я считаю, выполнение 1.2 миллиона инструкций будет с лихвой, да и на такой частоте микроконтроллер потребляет около 1 миллиампера, вот можете посмотреть скрин из даташита:

Минимальное рабочее напряжение, при котором ATtiny13 сохраняет работоспособность — 1.8 В, причем гарантировано будет работать, в данном случае, только на частоте в 1.2 МГц.
Итак, зашьем для начала почти родной начинающим ардуинщикам пример blink, ну как же без него?

Как вы уже заметили, скетч стал заметно легче, чем для Arduino Uno. Это связано с тем, что урезаны большинство Arduino'вских функций ну и они немного больше оптимизированные.
поддерживаются следующие функции:
pinMode()
digitalWrite()
digitalRead()
analogRead()
analogReference(INTERNAL) / (EXTERNAL)
shiftOut()
pulseIn()
analogWrite()
millis()
micros()
delay()
delayMicroseconds()
Итак, как мы только что увидели, нам доступно всего 1024 байта. Мало ли это? Ну, смотря для каких задач. Если, например, для каких-то там мигалок, пищалок или индикаторов, думаю, будет вполне достаточно, хотя можно даже что-то посерьёзней сварганить, особенно если познакомится с AVR-Cи.
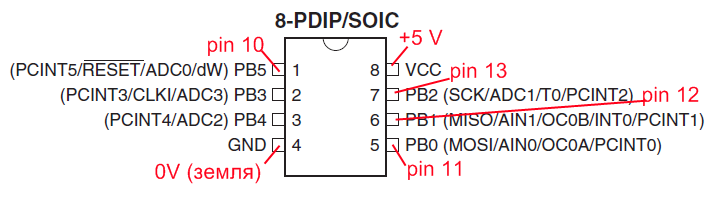
Распиновка микроконтроллера из даташита:
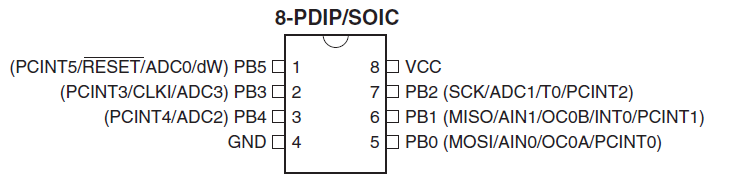
К примеру, PB4 — это то же, что и pin 4, или просто 4.
Аналоговые входы — все, на которых пишет ADC*, например PB4 — это есть ADC2, то есть для того, чтобы считать напряжение, пишем analogRead(A2); или просто analogRead(2);, аппаратный ШИМ поддерживают только порты 0 и 1.
UPD0: добавил ссылку как экономить место на микроконтроллере и как моделировать Arduino в программе Proteus:

Как экономить место на микроконтроллере?;
Ветка на форуме Arduino;
Моделирование Arduino в программе Proteus(на примереATtiny13);
Вот пример применения — Музыкальный дверной звонок на ATtiny13;
Все мои публикации.
UPD1 17.03.2016 Файлы ядра ищите теперь тут:
Дополнение статьи от товарища legos.