
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Поиск пути в трехмерном облаке — задача нетривиальная. Например, можно использовать octomap, octomap server и получить октодерево — карту из вокселей, с которым более удобно работать. Что делать дальше? Можно использовать вместе с библиотекой move it! для расчета движений и обратной кинематики манипуляторов с учетом коллизий. Насчет прокладки маршрута (например, для дрона) решений не знаю, надо самим реализовывать.
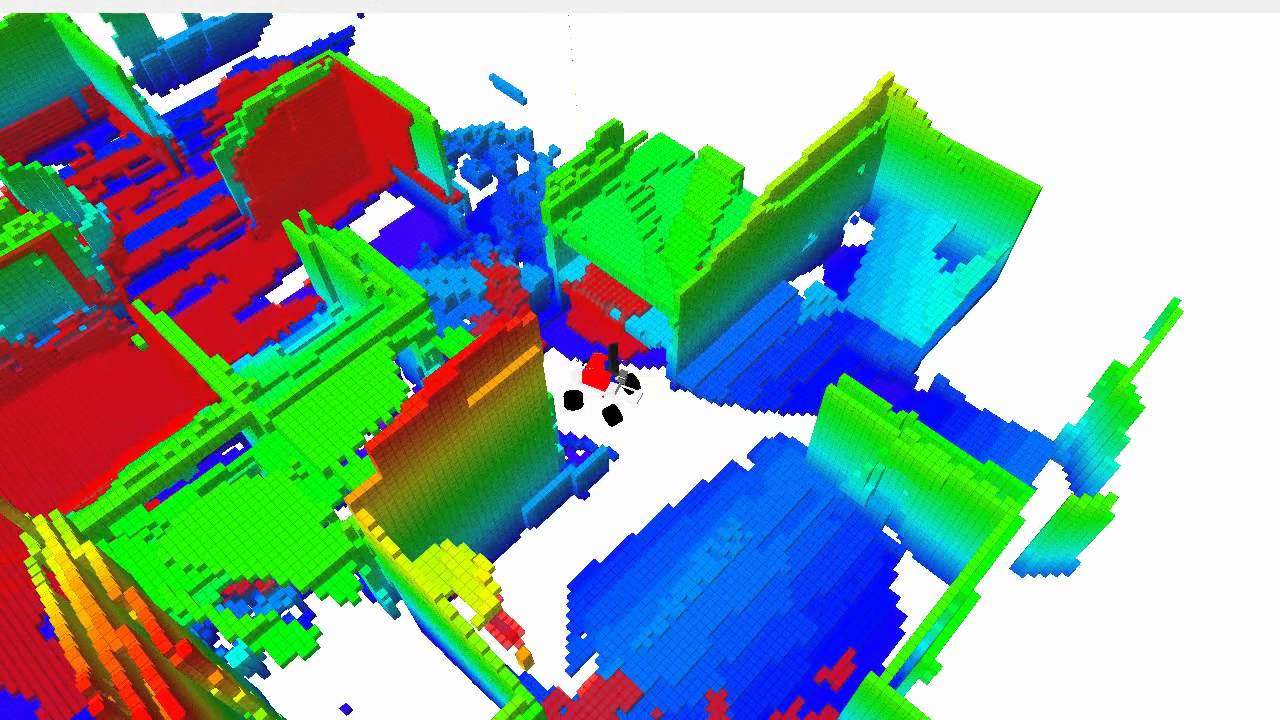
Можно пойти проще — использовать 2х мерную карту, получаемую из Rtab-map
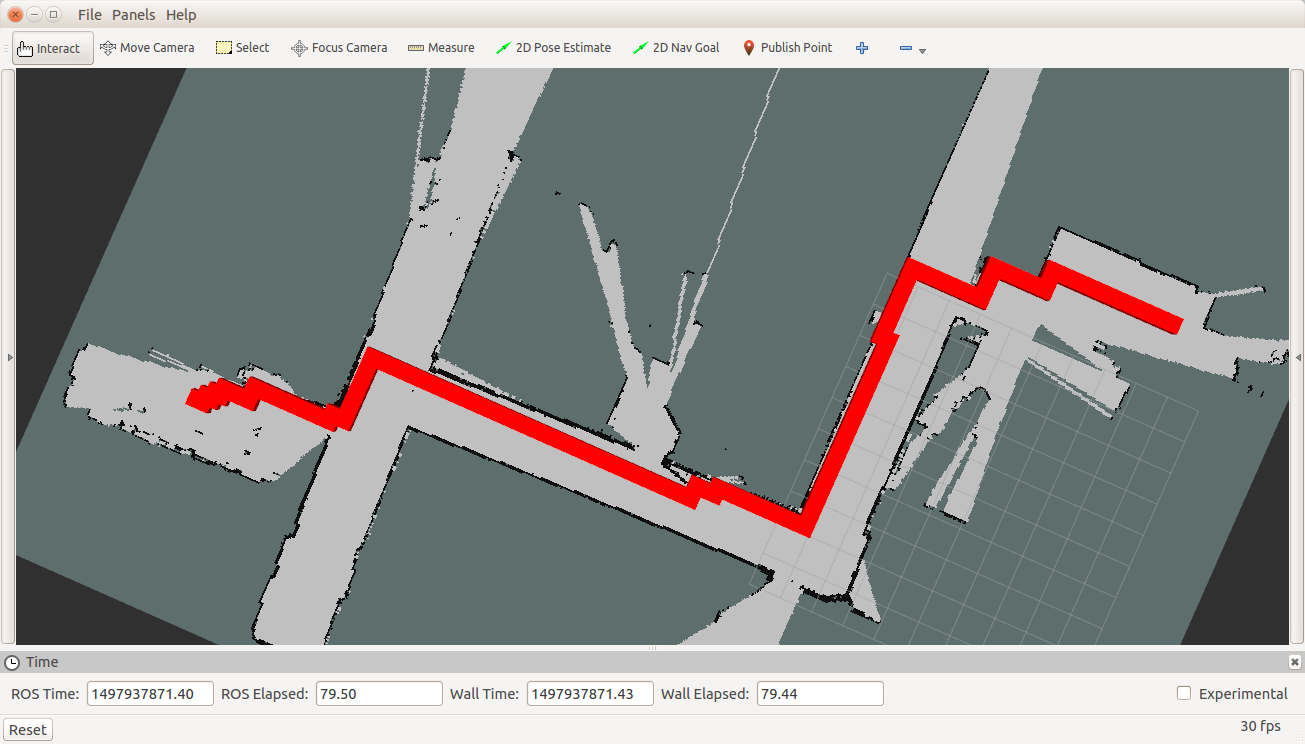
Мы можем добавить дисплей Map типа OccupancyGrid и выбрать топик “/rtabmap/proj_map” для визуализации плоской карты (как если бы мы использовали gmapping).
Тут много вариантов решения, вот пример, который делал мой одногруппник (@descine)
Обзор алгоритмов SLAM для камер глубины в ROS