Содержание
- Что такое тензор и для чего он нужен?
- Векторные и тензорные операции. Ранги тензоров
- Криволинейные координаты
- Динамика точки в тензорном изложении
- Действия над тензорами и некоторые другие теоретические вопросы
- Кинематика свободного твердого тела. Природа угловой скорости
- Конечный поворот твердого тела. Свойства тензора поворота и способ его вычисления
- О свертках тензора Леви-Чивиты
- Вывод тензора угловой скорости через параметры конечного поворота. Применяем голову и Maxima
- Получаем вектор угловой скорости. Работаем над недочетами
- Ускорение точки тела при свободном движении. Угловое ускорение твердого тела
- Параметры Родрига-Гамильтона в кинематике твердого тела
- СКА Maxima в задачах преобразования тензорных выражений. Угловые скорость и ускорения в параметрах Родрига-Гамильтона
- Нестандартное введение в динамику твердого тела
- Движение несвободного твердого тела
- Свойства тензора инерции твердого тела
- Зарисовка о гайке Джанибекова
- Математическое моделирование эффекта Джанибекова
Введение
Несказанно рад, что читателям понравилась предыдущая статья. Сразу сделаю оговорку — просто рассказать о таком ёмком понятии как тензор не получится — велик объем информации. Могу обещать, что к концу цикла мозаика сложится.
А в прошлый раз мы остановились на том, что рассмотрев представление вектора в косоугольном базисе, и определив, что он представляется двумя разными (ковариантными и контравариантными) наборами координат, получили общие выражения для скалярного произведения, учитывающие изменение метрики пространства. Таким образом, мы весьма осторожно подошли к понятию тензора
Тензор — математический объект, не изменяющийся при изменении системы координат, представленный набором >своих компонент и правилом преобразования компонент при смене базиса.
Скалярное произведение — это хорошо. Но как же быть с остальными операциями? Как они связываются с геометрией пространства и представимы ли в тензорном виде? Разумеется представимы, ведь векторы — это… тензоры! И скаляры — это тоже тензоры. Привычные нам математические объекты лишь частные примеры более общего понятия, коим является тензор.
Вот об этом мы и поговорим под катом.
1. Геометрический смысл метрического тензора
Для наглядности, которая не слишком повлияет на общность рассуждений, ограничимся трехмерным пространством. Докажем следующее утверждение — определитель метрического тензора равен квадрату объема параллелепипеда, натянутого на векторы базиса.
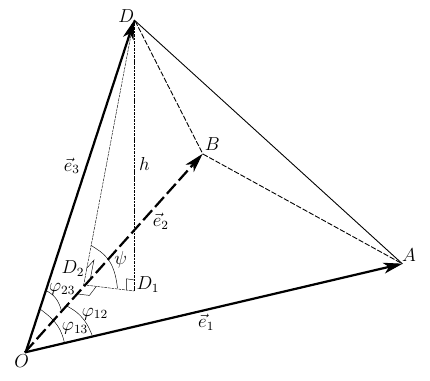
Рис. 1. Соотношения в трехгранном угле, образованном базисом
Рассмотрим произвольный базис
Вычислим объем параллелепипеда, натянутого на базис так, как это принято в стереометрии
где S — площадь основания параллелепипеда; h — высота, проведенная к данному основанию.
Площадь основания вычисляется тривиально — как модуль векторного произведения
С определением высоты придется повозится. Если бы мы знали угол
Угол
– первая теорема косинусов для трехгранного угла. Из нее выражаем косинус двугранного угла
Квадрат синуса необходимого нам угла выражаем через полученный косинус
Выполняем последовательные подстановки от (6) до (2), не забывая возвести в квадрат площадь S и высоту h. Выкладки достаточно громоздкие и для их выполнения можно воспользоваться СКА (Maple или Mathematica) и получить квадрат объема параллелепипеда
Теперь вычислим определитель метрического тензора. Им называется определитель матрицы, которая составлена из компонентов тензора. Входящие в нее скалярные произведения векторов базиса выпишем в явном виде
Вычислив его, получим тот же результат, что и для квадрата объема
Таким образом, утверждение (1) верно. Соответственно, объем параллелепипеда, натянутого на базис можно получить извлечением корня из определителя метрического тензора
где
Корень (7) часто встречается в литературе по ОТО и альтернативным теориям гравитации типа РТГ. Эта величина имеет фундаментальное значение и пригодится нам чуть позже.
2. Тензорное произведение векторов. Диада. Ранг тензора. Свертка
Обратим внимание на выражение скалятного произведения

Величину
называют тензорным произведением двух векторов или диадой. Тензорным это произведение названо потому что перемножаются тензоры и на выходе получается тензор, в данном случае второго ранга,
Тензор второго ранга (8), разумеется, представлен матрицей своих компонент
Используя (8) можно переписать скалярное произведение в виде
это тоже тензорное произведение, называемое сверткой из-за того, что приводит к уменьшению ранга результирующего тензора. Все индексы в (10) «немые», по ним производится двойное суммирование компонент метрического тензора и диады и на выходе получатся число c.
Внимательный читатель скажет, что на выходе должен получится тензор. Так тензор и получается — скаляр, это тоже тензор. Нулевого ранга, так как не имеет индексов и не подлежит преобразованию при смене базиса. Скалярное произведение инвариантно относительно смены базиса, ибо ни длина участвующих в нем векторов ни угол между ними от смены базиса не меняются. Значит скаляр — это тензор нулевого ранга.
Но не любое число есть скаляр. Скаляр — это длина вектора, скалярное произведение векторов, масса материального тела, абсолютная температура и прочие величины, не зависящие от системы координат. Компонента вектора уже не является скаляром — она меняется при смене базиса.
О ранге тензоров и типе из компонент мы поговорим чуть позже, а пока перейдем к следующему животрепещущему вопросу.
3. Векторное произведение. Тензор Леви-Чивиты
Вернемся к нашим векторам и выполним их векторное умножение
За неимением других вариантов, аккуратно раскроем скобки, помня о некоммутативности операции
Разумеется мы хорошо учились в университете и знаем, что векторное произведение вектора самого на себя равно нулю. Но мы не будем сильно спешить с упрощением, ибо кроме этого, несомненно приятного факта, мы видим ещё одну вешь — компоненты диады (9). Но кроме упрощения связанного с нулевым произведением коллинеарных векторов мы больше ничего не наблюдаем. Мы работаем с произвольным базисом в чистом виде.
Применим хитрость — умножим вектор
Коэффициенты в квадратных скобках — смешанные произведения векторов. Если векторы компланарны (лежат в одной плоскости) то такое произведение равно нулю. То есть, если в смешанном произведении повторяется хотя бы один вектор, оно равно нулю. Значит у нас остается только два слагаемых из девяти, в которых не повторяются векторы при смешанном умножении
Так, а теперь вспоминаем, что
Аналогичным образом выделяем остальные компоненты
Выражения (11) — (13) очень напоминают формулы для расчета проекций векторного произведения из курса векторной алгебры, с точностью до множителя со смешанным произведением. Но мы-то работаем не в декартовом базисе, естественно ожидать некоторое отличие. Кстати, а что это за множитель? Ведь смешанное произведение векторов имеет геометрический смысл… Это же… объем параллелепипеда, натянутого на векторы в нем участвующие. А объем параллелепипеда, натянутого на базис это ведь корень из определителя метрического тензора! То есть
Вот она и всплыла на поверхность, метрика используемого пространства. Таким образом, можно построить некий тензор, свертка исходных векторов с которым дает ковариантный вектор, являющийся результатом векторного произведения. Более того, этот тензор связан с метрическим тензором. Таковой тензор третьего ранга носит имя итальянского математика Леви-Чивиты.
Не трудно увидеть, что компоненты тензора Леви-Чивиты определяются соотношением
Их будет 27, но большинство из них, а именно 21 равны нулю. Это те компоненты, индексы которых повторяются хотя бы один раз. Ненулевых компоненты только шесть, они соответствуют не повторяющимся индексам. По модулю они равны
Знак смешанных произведений зависит от порядка индексов: в наборах (1,2,3), (2,3,1), (3,1,2) они положительны, в наборах (1,3,2), (2,1,3) и (3,2,1) — отрицательны. Известно, что если векторы заданы в правой системе координат, то их смешанное произведение будет положительно, если они образуют правую тройку векторов. В первых слагаемых (16) — (18) фигурируют правые тройки векторов базиса. Во вторых слагаемых, в смешанном произведении участвуют те же векторы, но взятые как левая тройка.
Как определить, какую тройку дают базисные векторы? Очень просто, ведь они упорядочены, им присвоены номера 1, 2, 3. Если мы соблюдаем порядок следования векторов, мы получаем тройку, соответствующую используемой системе координат, то есть (1,2,3) — правая тройка.
А если первым мы берем вектор 2? То за ним должен следовать вектор 3, по порядку. А какой следующий? А следующий вектор 1, начинаем всё сначала, но не нарушая порядка следования векторов, то есть и (2,3,1) — правая тройка, ну и (3,1,2) — тоже правая тройка. Говоря языком комбинаторики — базисные векторы в упорядоченной тройке образуют четную перестановку (то есть не нарушающую порядок следования элементов). Если порядок следовая векторов в тройке обратный принятому, то их перестановка будет нечетной. Таким образом перестановки (3,2,1), (2,1,3), (1,3,2) — нечетные, а тройки векторов — левые.
Используя всё вышесказанное, введем функцию
и, на основании (14) и (19) наконец выпишем тензор Леви-Чивиты
для правой системы координат
для левой системы координат.
После этого можно выписать выражение для векторного произведения в тензорном виде
Таким образом — векторное произведение, это свертка диады тензором Леви-Чивиты, дающая на выходе ковектор — то есть вектор, заданный ковариантными компонентами.
4. Смешанное (векторно-скалярное) произведение векторов
Вооружившись полученными знаниями рассмотрим теперь такую операцию
Не оперируя векторами, попробуем сразу записать её в тензорном виде. Во-первых, скалярное произведение коммутативно, поэтому
А теперь вспомним, что скалярное произведение можно расписать как тензорное
произведение ковектора на вектор
Векторное произведение, исходя из (21)как раз и дает ковектор, а значит
То есть, окончательно, смешанное произведение в тензорной форме
где снова участвует тензор Леви-Чивиты.
Выражение (22) можно было получить оперируя векторами, выйдя опять на определение тензора Леви-Чивиты, но, как видно, рациональнее использовать тензорную запись.
5. Ранг тензора. Ковариантные и контравариантные компоненты
Итак, в процессе разбора векторных операций мы пришли к выводу, что тензоры — это математические объекты, обобщающие свойства и операции над многими, известными нам математическими объектами. Тензорами являются и скаляры и векторы. Различаются они рангом и количеством ковариантных и контравариантных компонент. Ранг равен общему числу индексов тензора, а обозначается он парой целых чисел в скобках (p, q), где p — число контравариантных индексов, q — число ковариантных индексов. Говорят что тензор — p-раз контравариантный и q-раз ковариантный, ранга p+q.
- Тензор ранга (0,0) — это скаляр, величина, значение которой может быть выражено одним числом, со значением инвариантным относительно смены системы координат. У скаляра нет индексов, и он вообще не преобразуется при смене базиса. Но, повторимся, не всякое число есть скаляр. Так например, компонент вектора или тензора не есть скаляр, ибо он изменяется при смене базиса.
- Тензор ранга (1,0) — вектор. Для вектора естественно контравариантное представление, для вычисления скалярного произведения векторов требуется их свертка с метрическим тензором.
Преобразование компонент вектора производится путем применения к нему линейного оператора, по сути умножением матрицы преобразования на столбец, содержащий компоненты вектора, что в тензорной форме выглядит как
- Тензор ранга (0,1) — ковектор. Если в рассматриваемом пространстве определен невырожденный метрический тензор
то вектор и ковектор — это два разных представления одного и того же геометрического объекта — вектора. В ортогональном базисе (векторы которого взаимно перпендикулярны) контравариантные и ковариантные координаты cовпадают. Переход от одного представления к другому производится сверткой с метрическим тензором
гдеконтрвариантный метрический тензор, компоненты которого — матрица,
обратная матрице компонент тензора.
Для скалярного умножения ковектора на вектор не нужно использовать метрический тензор, оно производится прямой сверткой с вектором.
Преобразование компонент ковектора так же производится путем применения к нему линейного оператора, но в отличие от вектора, производится умножение строки, содержащей компоненты ковектора на матрицу преобразования координат
- Тензор ранга (0,2) — билинейная форма, примером которой может служить дважды ковариантный метрический тензор gij. Компоненты метрического тензора преобразуются путем двукратного применения к нему линейного оператора преобразования координат, что соответствует умножению транспонированной матрицы преобразования на матрицу метрического тензора и последующему умножению результата на матрицу преобразования
- Тензор ранга (2,0) — примером может служить диада (8). Вообще, все тензоры рангов (k,0) называются поливекторами или полиадами (триады, тетрады и т.д.), и образованы они как линейные комбинации тензорных произведений соответствующего количества векторов. Их компоненты преобразуются соответствующим рангу количеством применения линейных
операторов, преобразующих исходные векторы.
- Тензор ранга (1,1) — линейный оператор. Примером может служить матрица поворота или любого другого преобразования координат векторов и ковекторов. Вообще, применение линейного оператора сводится к операции матричного умножения
где— результат преобразования;
— исходный вектор;
— компоненты матрицы линейного оператора. Рассмотрим процесс преобразования линейного оператора. Пусть S матрица перехода от одно базиса к другому. Тогда, при смене базиса преобразуются оба вектора — и аргумент и результат
Подставляя (24) в (23) получаем
откуда, умножая слева на матрицуполучаем
где— компоненты матрицы
сравнивая (25) и (26), получаем выражение преобразования линейного оператора
Все перечисленные объекты обладают общностью свойств: имеют набор компонент и правило преобразования при смене базиса.
Выводы
Подведем некоторые итоги.
Во-первых, мы выяснили, что векторные операции могут быть сведены к тензорным соотношениям, что избавляет нас от неудобства каждый раз выводить формулы для них при использовании экзотической системы координат или увеличении размерности пространства. Соотношения останутся прежними, изменится только внутренность тензоров, связанных с геометрией пространства и выбором положительного направления вращения в нем. Учитывая, что многие уравнения физики, математики и механики оперируют векторными величинами, использование тензоров позволяет записать уравнения лишь однажды. Кроме того, тензорная запись компактна — это упрощает проведение выкладок.
Во-вторых, мы понимаем, что многие математические объекты — скаляры, векторы, билинейные формы, линейные операторы — всё это частные случаи тензоров, а значит их свойства могут быть обобщены под могучим крылом своего более сложного собрата-тензора.
В дальнейшем мы увидим, как тензорная запись позволяет подходить к весьма прозаичным вопросам с общих позиций, облегчая жизнь исследователю.
Продолжение следует…
