Всем привет!
Продолжаю перевод книги John Torjo «Boost.Asio C++ Network Programming».
Содержание:
В этой главе мы собираемся углубиться в создание нетривиальных клиент/серверных приложений с использованием Boost.Asio. Вы можете запускать и тестировать их, и как только вы разберетесь в них, вы сможете использовать их как основу для создания собственных приложений.
В следующих приложениях:
Клиент может делать следующие запросы:
Для интереса добавим несколько выкрутасов:
Во-первых, мы реализуем синхронное приложение. Вы увидите, что код является простым и понятным для усваивания. Тем не менее, сетевая часть должна выполняться в отдельном потоке, так как все сетевые вызовы блокируются.
Синхронный клиент, как вы и ожидали, делает все последовательно; подключается к серверу, заходит на него, а затем выполняет цикл связи, а именно заснуть, сделать запрос, прочитать ответ сервера, опять заснуть и так далее.

Так как мы делаем синхронный вариант, то это позволяет делать некоторые вещи более простыми. Во-первых, подключение к серверу; сделаем это в виде цикла, например, так:
Следующий пример это класс
В цикле мы просто пингуемся, читаем ответ от сервера и засыпаем. Засыпаем мы на неопределенное время (иногда более 5 секунд), так что в определенный момент сервер будет нас отключать:
Для чтения ответа мы используем
При чтении ответа от сервера в нашем пинге, если мы получим
Синхронный сервер так же достаточно прост. Он нуждается в двух потоках, один для прослушивания новых клиентов, другой для обработки существующих. Он не может использовать один поток, ожидание нового клиента является блокирующей операцией, таким образом нам нужен дополнительный поток для обработки существующих клиентов.

Как и ожидалось, сервер писать немного сложнее, чем клиента. С одной стороны он должен управлять всеми подключенными клиентами. Так как мы пишем синхронный вариант сервера, то нам необходимо, по крайней мере, два потока, один из которых принимает новых клиентов (так как
Нам нужен список клиентов, чтобы обрабатывать входящие запросы от них.
У каждого экземпляра
Основной код
Приведенный выше код довольно очевиден. Наиболее важная функция это
Взгляните на
А теперь самая интересная (и сложная) часть, пойдем асинхронным путем.
Вещи сейчас будут рассматриваться немного сложнее, но, безусловно, управляемые. И у нас будет приложение, которое не блокируется.

Вам уже должен быть понятен следующий код:
Вы увидите дополнительную функцию-таймер
Ну а теперь посмотрим, как выглядит основная логика класса:
В
И наконец, функции
Обратите внимание, что каждая операция
Схема довольно сложна, вы видите, что от Boost.Asio отходит четыре стрелки к
Итак, мы работаем асинхронно, поэтому можем работать в одном потоке. Прием клиентов это самая легкая часть, как показано в следующем фрагменте кода:
Приведенный выше код будет всегда асинхронно ждать новых клиентов (каждое новое подключение клиента будет вызывать другое асинхронное ожидание).
Мы должны следить за событием
Скелет класса
Я вызываю
Мы должны будем использовать предыдущий код сейчас; он подобен тому, что мы использовали для клиентского приложения. У нас есть дополнительная функция
Сервер непрерывно ожидает асинхронных операций чтения:
Код довольно прост; одна вещь состоит в том, что, когда новый клиент входит в систему, мы вызываем
Как только он получает запрос, он сразу же отвечает на него, как показано в следующем фрагменте кода:
В конце каждой операции записи вызывается
Поскольку каждое чтение начинается с асинхронного ожидания в течении 5 секунд, то можно увидеть сработает ли у клиента таймер. Если это так, то мы закрываем соединение:
Вот и весь сервер. Вы можете запустить его и начать работать с ним!
В этой главе мы посмотрели, как написать несколько основных клиент/серверных приложений. Мы избегали таких ловушек как утечка памяти и дедлоков. Все программы подойдут в качестве основы для ваших будущих приложений, их можно расширять и адаптировать.
В следующей главе мы получим более глубокое понимание синхронного по сравнению с асинхронным, различия при использовании Boost.Asio; посмотрим, как вы можете подключить свою собственную асинхронную операцию.
Ресурсы к этой статье: ссылка
Всем большое спасибо за внимание, до новых встреч!
Продолжаю перевод книги John Torjo «Boost.Asio C++ Network Programming».
Содержание:
- Глава 1: Приступая к работе с Boost.Asio
- Глава 2: Основы Boost.Asio
- Глава 3: Echo Сервер/Клиент
- Глава 4: Клиент и Сервер
- Глава 5: Синхронное против асинхронного
- Глава 6: Boost.Asio – другие особенности
- Глава 7: Boost.Asio – дополнительные темы
В этой главе мы собираемся углубиться в создание нетривиальных клиент/серверных приложений с использованием Boost.Asio. Вы можете запускать и тестировать их, и как только вы разберетесь в них, вы сможете использовать их как основу для создания собственных приложений.
В следующих приложениях:
- Клиент заходит на сервер с именем пользователя (без пароля)
- Все соединения инициируются клиентом, где клиент запрашивает ответ от сервера
- Все запросы и ответы на них заканчиваются символом ‘\n’
- Сервер отключает любого клиента, который не пингуется в течение 5 секунд
Клиент может делать следующие запросы:
- Получить список всех подключенных клиентов
- Клиент может пинговаться, и когда он припингуется сервер ответить либо
ping_okлибоping client_list_chaned(в последнем случае клиент повторно запрашивает список подключенных клиентов).
Для интереса добавим несколько выкрутасов:
- В каждое клиентское приложение входит 6 подключаемых пользователей, таких как Джон, Джеймс, Люси, Трейси Франк и Эбби.
- Каждый клиент проверяет связь с сервером в случайный момент времени (раз в 1-7 секунд, таким образом, время от времени соединение с сервером будет разрываться)
Синхронные сервер/клиент
Во-первых, мы реализуем синхронное приложение. Вы увидите, что код является простым и понятным для усваивания. Тем не менее, сетевая часть должна выполняться в отдельном потоке, так как все сетевые вызовы блокируются.
Синхронный клиент
Синхронный клиент, как вы и ожидали, делает все последовательно; подключается к серверу, заходит на него, а затем выполняет цикл связи, а именно заснуть, сделать запрос, прочитать ответ сервера, опять заснуть и так далее.
Так как мы делаем синхронный вариант, то это позволяет делать некоторые вещи более простыми. Во-первых, подключение к серверу; сделаем это в виде цикла, например, так:
ip::tcp::endpoint ep( ip::address::from_string("127.0.0.1"), 8001); void run_client(const std::string & client_name) { talk_to_svr client(client_name); try { client.connect(ep); client.loop(); } catch(boost::system::system_error & err) { std::cout << "client terminated " << std::endl; } }
Следующий пример это класс
talk_to_svr:struct talk_to_svr { talk_to_svr(const std::string & username): sock_(service), started_(true), username_(username) {} void connect(ip::tcp::endpoint ep) { sock_.connect(ep); } void loop() { write("login " + username_ + "\n"); read_answer(); while ( started_) { write_request(); read_answer(); boost::this_thread::sleep(millisec(rand() % 7000)); } } std::string username() const { return username_; } ... private: ip::tcp::socket sock_; enum { max_msg = 1024 }; int already_read_; char buff_[max_msg]; bool started_; std::string username_; };
В цикле мы просто пингуемся, читаем ответ от сервера и засыпаем. Засыпаем мы на неопределенное время (иногда более 5 секунд), так что в определенный момент сервер будет нас отключать:
void write_request() { write("ping\n"); } void read_answer() { already_read_ = 0; read(sock_, buffer(buff_), boost::bind(&talk_to_svr::read_complete, this, _1, _2)); process_msg(); } void process_msg() { std::string msg(buff_, already_read_); if ( msg.find("login ") == 0) on_login(); else if ( msg.find("ping") == 0) on_ping(msg); else if ( msg.find("clients ") == 0) on_clients(msg); else std::cerr << "invalid msg " << msg << std::endl; }
Для чтения ответа мы используем
read_complete (о которой много говорилось в прошлой главе), чтобы убедиться, что мы дочитали до символа ‘\n’. Логика заключена в функции process_msg(), где мы читаем ответ клиента и направляем в правильную функцию:void on_login() { do_ask_clients(); } void on_ping(const std::string & msg) { std::istringstream in(msg); std::string answer; in >> answer >> answer; if ( answer == "client_list_changed") do_ask_clients(); } void on_clients(const std::string & msg) { std::string clients = msg.substr(8); std::cout << username_ << ", new client list:" << clients; } void do_ask_clients() { write("ask_clients\n"); read_answer(); } void write(const std::string & msg) { sock_.write_some(buffer(msg)); } size_t read_complete(const boost::system::error_code & err, size_t bytes) { // ... same as before }
При чтении ответа от сервера в нашем пинге, если мы получим
client_list_changed, то мы снова делаем запрос на получение листа клиентов.Синхронный сервер
Синхронный сервер так же достаточно прост. Он нуждается в двух потоках, один для прослушивания новых клиентов, другой для обработки существующих. Он не может использовать один поток, ожидание нового клиента является блокирующей операцией, таким образом нам нужен дополнительный поток для обработки существующих клиентов.
Как и ожидалось, сервер писать немного сложнее, чем клиента. С одной стороны он должен управлять всеми подключенными клиентами. Так как мы пишем синхронный вариант сервера, то нам необходимо, по крайней мере, два потока, один из которых принимает новых клиентов (так как
accept() блокирующая операция), а другой отвечает за уже существующих:void accept_thread() { ip::tcp::acceptor acceptor(service, ip::tcp::endpoint(ip::tcp::v4(), 8001)); while ( true) { client_ptr new_( new talk_to_client); acceptor.accept(new_->sock()); boost::recursive_mutex::scoped_lock lk(cs); clients.push_back(new_); } } void handle_clients_thread() { while ( true) { boost::this_thread::sleep( millisec(1)); boost::recursive_mutex::scoped_lock lk(cs); for(array::iterator b = clients.begin(),e = clients.end(); b != e; ++b) (*b)->answer_to_client(); // erase clients that timed out clients.erase(std::remove_if(clients.begin(), clients.end(), boost::bind(&talk_to_client::timed_out,_1)), clients.end()); } } int main(int argc, char* argv[]) { boost::thread_group threads; threads.create_thread(accept_thread); threads.create_thread(handle_clients_thread); threads.join_all(); }
Нам нужен список клиентов, чтобы обрабатывать входящие запросы от них.
У каждого экземпляра
talk_to_client есть сокет. У него нет копирующего конструктора, таким образом, если вы хотите запихнуть его в std::vector, то вам понадобиться завести shared pointer на него. Есть два способа сделать это: либо внутри talk_to_client завести shared pointer на сокет, а затем сделать массив из экземпляров talk_to_client или когда есть экземпляр talk_to_client с сокетом по значению и завести массив shared pointer-ов на talk_to_client. Я выбрал последнее, но вы можете пойти и другим путем:typedef boost::shared_ptr<talk_to_client> client_ptr; typedef std::vector<client_ptr> array; array clients; boost::recursive_mutex cs; // thread-safe access to clients array
Основной код
talk_to_client выглядит следующим образом:struct talk_to_client : boost::enable_shared_from_this<talk_to_client> { talk_to_client() { ... } std::string username() const { return username_; } void answer_to_client() { try { read_request(); process_request(); } catch ( boost::system::system_error&) { stop(); } if ( timed_out()) stop(); } void set_clients_changed() { clients_changed_ = true; } ip::tcp::socket & sock() { return sock_; } bool timed_out() const { ptime now = microsec_clock::local_time(); long long ms = (now - last_ping).total_milliseconds(); return ms > 5000 ; } void stop() { boost::system::error_code err; sock_.close(err); } void read_request() { if ( sock_.available()) already_read_ += sock_.read_some( buffer(buff_ + already_read_, max_msg - already_read_)); } ... private: // ... same as in Synchronous Client bool clients_changed_; ptime last_ping; };
Приведенный выше код довольно очевиден. Наиболее важная функция это
read_request(). Чтение будет происходить только если есть данные, таким образом, сервер никогда не будет заблокирован:void process_request() { bool found_enter = std::find(buff_, buff_ + already_read_, '\n') < buff_ + already_read_; if ( !found_enter) return; // message is not full // process the msg last_ping = microsec_clock::local_time(); size_t pos = std::find(buff_, buff_ + already_read_, '\n') - buff_; std::string msg(buff_, pos); std::copy(buff_ + already_read_, buff_ + max_msg, buff_); already_read_ -= pos + 1; if ( msg.find("login ") == 0) on_login(msg); else if ( msg.find("ping") == 0) on_ping(); else if ( msg.find("ask_clients") == 0) on_clients(); else std::cerr << "invalid msg " << msg << std::endl; } void on_login(const std::string & msg) { std::istringstream in(msg); in >> username_ >> username_; write("login ok\n"); update_clients_changed(); } void on_ping() { write(clients_changed_ ? "ping client_list_changed\n" : "ping ok\n"); clients_changed_ = false; } void on_clients() { std::string msg; { boost::recursive_mutex::scoped_lock lk(cs); for( array::const_iterator b = clients.begin(), e = clients.end() ;b != e; ++b) msg += (*b)->username() + " "; } write("clients " + msg + "\n"); } void write(const std::string & msg) { sock_.write_some(buffer(msg)); }
Взгляните на
process_request(). После того как мы считали те данные, которые были доступны, мы должны проверить считали ли мы сообщение до конца (если да, то found_enteris установится в true). Если это так, то мы защищаем себя от чтения, может быть, больше чем одного сообщения (после символа ‘\n’ сохраняться в буфер ничего не будет), а затем мы интерпретируем полностью прочитанное сообщение. Остальная часть кода довольно проста.Асинхронные сервер/клиент
А теперь самая интересная (и сложная) часть, пойдем асинхронным путем.
Асинхронный клиент
Вещи сейчас будут рассматриваться немного сложнее, но, безусловно, управляемые. И у нас будет приложение, которое не блокируется.
Вам уже должен быть понятен следующий код:
#define MEM_FN(x) boost::bind(&self_type::x, shared_from_this()) #define MEM_FN1(x,y) boost::bind(&self_type::x, shared_from_this(),y) #define MEM_FN2(x,y,z) boost::bind(&self_type::x, shared_from_this(),y,z) class talk_to_svr : public boost::enable_shared_from_this<talk_to_svr>, boost::noncopyable { typedef talk_to_svr self_type; talk_to_svr(const std::string & username) : sock_(service), started_(true), username_(username), timer_(service) {} void start(ip::tcp::endpoint ep) { sock_.async_connect(ep, MEM_FN1(on_connect,_1)); } public: typedef boost::system::error_code error_code; typedef boost::shared_ptr<talk_to_svr> ptr; static ptr start(ip::tcp::endpoint ep, const std::string & username) { ptr new_(new talk_to_svr(username)); new_->start(ep); return new_; } void stop() { if ( !started_) return; started_ = false; sock_.close(); } bool started() { return started_; } ... private: size_t read_complete(const boost::system::error_code & err, size_t bytes) { if ( err) return 0; bool found = std::find(read_buffer_, read_buffer_ + bytes, '\n') < read_buffer_ + bytes; return found ? 0 : 1; } private: ip::tcp::socket sock_; enum { max_msg = 1024 }; char read_buffer_[max_msg]; char write_buffer_[max_msg]; bool started_; std::string username_; deadline_timer timer_; };
Вы увидите дополнительную функцию-таймер
deadline_timer для осуществления пинга сервера; и опять же, мы будем проверять связь с сервером в случайный момент времени.Ну а теперь посмотрим, как выглядит основная логика класса:
void on_connect(const error_code & err) { if ( !err) do_write("login " + username_ + "\n"); else stop(); } void on_read(const error_code & err, size_t bytes) { if ( err) stop(); if ( !started() ) return; // process the msg std::string msg(read_buffer_, bytes); if ( msg.find("login ") == 0) on_login(); else if ( msg.find("ping") == 0) on_ping(msg); else if ( msg.find("clients ") == 0) on_clients(msg); } void on_login() { do_ask_clients(); } void on_ping(const std::string & msg) { std::istringstream in(msg); std::string answer; in >> answer >> answer; if ( answer == "client_list_changed") do_ask_clients(); else postpone_ping(); } void on_clients(const std::string & msg) { std::string clients = msg.substr(8); std::cout << username_ << ", new client list:" << clients ; postpone_ping(); }
В
on_read() в первых двух строчках кода сделано все очень красиво. В первой строке мы проверяем, есть ли ошибка, если да, то останавливаемся. Во второй строке мы проверяем, остановились ли мы (до этого или только что), если да, то возвращаемся. В противном случае, если все хорошо, мы обрабатываем входящее сообщение.И наконец, функции
do_* следующие:void do_ping() { do_write("ping\n"); } void postpone_ping() { timer_.expires_from_now(boost::posix_time::millisec(rand() % 7000)); timer_.async_wait( MEM_FN(do_ping)); } void do_ask_clients() { do_write("ask_clients\n"); } void on_write(const error_code & err, size_t bytes) { do_read(); } void do_read() { async_read(sock_, buffer(read_buffer_), MEM_FN2(read_complete,_1,_2), MEM_FN2(on_read,_1,_2)); } void do_write(const std::string & msg) { if ( !started() ) return; std::copy(msg.begin(), msg.end(), write_buffer_); sock_.async_write_some( buffer(write_buffer_, msg.size()), MEM_FN2(on_write,_1,_2)); }
Обратите внимание, что каждая операция
read вызывает пинг:- Когда операция
readзавершится, вызоветсяon_read() -
on_read()перенаправляется вon_login(), on_ping(), илиon_clients() - Каждая из функций либо откладывает пинг, либо запрашивает клиентов
- Если мы запросим клиентов, когда их получила операция read, она отложит пинг
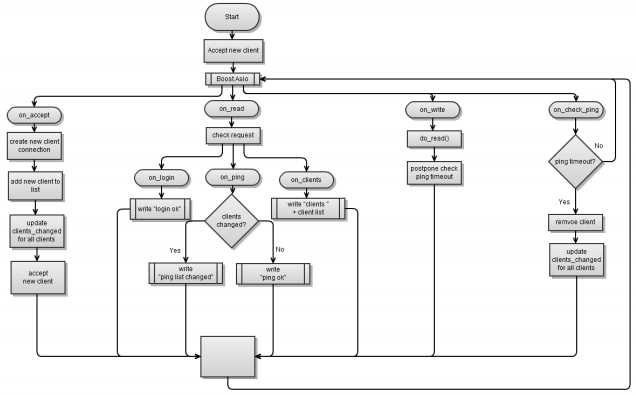
Асинхронный сервер
Схема довольно сложна, вы видите, что от Boost.Asio отходит четыре стрелки к
on_accept, on_read, on_write и on_check_ping. В основном это означает, что вы никогда не узнаете вызовом какой из этих асинхронных операций все закончится, но вы точно знаете, что это будет одна из них.Итак, мы работаем асинхронно, поэтому можем работать в одном потоке. Прием клиентов это самая легкая часть, как показано в следующем фрагменте кода:
ip::tcp::acceptor acceptor(service, ip::tcp::endpoint(ip::tcp::v4(), 8001)); void handle_accept(talk_to_client::ptr client, const error_code & err) { client->start(); talk_to_client::ptr new_client = talk_to_client::new_(); acceptor.async_accept(new_client->sock(), boost::bind(handle_accept,new_client,_1)); } int main(int argc, char* argv[]) { talk_to_client::ptr client = talk_to_client::new_(); acceptor.async_accept(client->sock(), boost::bind(handle_accept,client,_1)); service.run(); }
Приведенный выше код будет всегда асинхронно ждать новых клиентов (каждое новое подключение клиента будет вызывать другое асинхронное ожидание).
Мы должны следить за событием
client list changed (подключился новый клиент или один из клиентов получил список и отключился) и уведомить остальных клиентов, когда это произойдет. Таким образом, мы должны хранить массив клиентов, в противном случае не было бы никакой необходимости в этом массиве, если вы не хотели бы знать всех подключенных клиентов в данный момент времени:class talk_to_client; typedef boost::shared_ptr<talk_to_client> client_ptr; typedef std::vector<client_ptr> array; array clients;
Скелет класса
connection выглядит следующим образом:class talk_to_client : public boost::enable_shared_from_this<talk_to_ client>, boost::noncopyable { talk_to_client() { ... } public: typedef boost::system::error_code error_code; typedef boost::shared_ptr<talk_to_client> ptr; void start() { started_ = true; clients.push_back( shared_from_this()); last_ping = boost::posix_time::microsec_clock::local_time(); do_read(); // first, we wait for client to login } static ptr new_() { ptr new_(new talk_to_client); return new_; } void stop() { if ( !started_) return; started_ = false; sock_.close(); ptr self = shared_from_this(); array::iterator it = std::find(clients.begin(), clients.end(), self); clients.erase(it); update_clients_changed(); } bool started() const { return started_; } ip::tcp::socket & sock() { return sock_;} std::string username() const { return username_; } void set_clients_changed() { clients_changed_ = true; } ... private: ip::tcp::socket sock_; enum { max_msg = 1024 }; char read_buffer_[max_msg]; char write_buffer_[max_msg]; bool started_; std::string username_; deadline_timer timer_; boost::posix_time::ptime last_ping; bool clients_changed_; };
Я вызываю
talk_to_client или talk_to_server из класса connection, чтобы сделать более ясным то, что я говорю.Мы должны будем использовать предыдущий код сейчас; он подобен тому, что мы использовали для клиентского приложения. У нас есть дополнительная функция
stop(), которая удаляет подключенного клиента из массива клиентов.Сервер непрерывно ожидает асинхронных операций чтения:
void on_read(const error_code & err, size_t bytes) { if ( err) stop(); if ( !started() ) return; std::string msg(read_buffer_, bytes); if ( msg.find("login ") == 0) on_login(msg); else if ( msg.find("ping") == 0) on_ping(); else if ( msg.find("ask_clients") == 0) on_clients(); } void on_login(const std::string & msg) { std::istringstream in(msg); in >> username_ >> username_; do_write("login ok\n"); update_clients_changed(); } void on_ping() { do_write(clients_changed_ ? "ping client_list_changed\n" : "ping ok\n"); clients_changed_ = false; } void on_clients() { std::string msg; for(array::const_iterator b =clients.begin(),e =clients.end(); b != e; ++b) msg += (*b)->username() + " "; do_write("clients " + msg + "\n"); }
Код довольно прост; одна вещь состоит в том, что, когда новый клиент входит в систему, мы вызываем
update_clients_changed(), которая устанавливает clients_changed_ в true для всех клиентов.Как только он получает запрос, он сразу же отвечает на него, как показано в следующем фрагменте кода:
void do_ping() { do_write("ping\n"); } void do_ask_clients() { do_write("ask_clients\n"); } void on_write(const error_code & err, size_t bytes) { do_read(); } void do_read() { async_read(sock_, buffer(read_buffer_), MEM_FN2(read_complete,_1,_2), MEM_FN2(on_read,_1,_2)); post_check_ping(); } void do_write(const std::string & msg) { if ( !started() ) return; std::copy(msg.begin(), msg.end(), write_buffer_); sock_.async_write_some( buffer(write_buffer_, msg.size()), MEM_FN2(on_write,_1,_2)); } size_t read_complete(const boost::system::error_code & err, size_t bytes) { // ... as before }
В конце каждой операции записи вызывается
on_write(), которая вызывает другое асинхронное чтение, и, таким образом ожидает запрос – отвечает на него, цикл продолжается, пока клиент не отключится или не сработает таймер.Поскольку каждое чтение начинается с асинхронного ожидания в течении 5 секунд, то можно увидеть сработает ли у клиента таймер. Если это так, то мы закрываем соединение:
void on_check_ping() { ptime now = microsec_clock::local_time(); if ( (now - last_ping).total_milliseconds() > 5000) stop(); last_ping = boost::posix_time::microsec_clock::local_time(); } void post_check_ping() { timer_.expires_from_now(boost::posix_time::millisec(5000)); timer_.async_wait( MEM_FN(on_check_ping)); }
Вот и весь сервер. Вы можете запустить его и начать работать с ним!
Резюме
В этой главе мы посмотрели, как написать несколько основных клиент/серверных приложений. Мы избегали таких ловушек как утечка памяти и дедлоков. Все программы подойдут в качестве основы для ваших будущих приложений, их можно расширять и адаптировать.
В следующей главе мы получим более глубокое понимание синхронного по сравнению с асинхронным, различия при использовании Boost.Asio; посмотрим, как вы можете подключить свою собственную асинхронную операцию.
Ресурсы к этой статье: ссылка
Всем большое спасибо за внимание, до новых встреч!

