Статья посвящена введению в нейронные сети и примеру их реализации. В первой части дано небольшое теоретическое введение в нейронные сети на примере нейронной сети Хопфилда. Показано, как осуществляется обучение сети и как описывается ее динамика. Во второй части показано, как можно реализовать алгоритмы, описанные в первой части при помощи языка С++. Разработанная программа наглядно показывает способность нейронной сети очищать от шума ключевой образ. В конце статьи есть ссылка на исходный код проекта.
Теоретическое описание
Введение
Для начала, необходимо определить, что такое нейрон. В биологии нейрон — специализированная клетка, из которой состоит нервная система. Биологический нейрон имеет строение, показанное на рис.1.

Рис.1 Схема нейрона
Нейронную сеть можно ввести как совокупность нейронов и их взаимосвязей. Следовательно, для того, чтобы определить искусственную (не биологическую) нейронную сеть необходимо:
- Задать архитектуру сети;
- Определить динамику отдельных элементов сети — нейронов;
- Определить правила, по которым нейроны будут взаимодействовать между собой;
- Описать алгоритм обучения, т.е. формирования связей для решения поставленной задачи.
В качестве архитектуры нейронной сети будет использоваться сеть Хопфилда. Данная модель, видимо, является наиболее распространенной математической моделью в нейронауке. Это обусловлено ее простотой и наглядность. Сеть Хопфилда показывает, каким образом может быть организована память в сети из элементов, которые не являются очень надежными. Экспериментальные данные показывают, что при увеличении количества вышедших из строя нейронов до 50%, вероятность правильного ответа крайне близка к 100%. Даже поверхностное сопоставление нейронной сети (например, мозга) и Фон-Неймановской ЭВМ показывает, насколько сильно различаются эти объекты: к примеру, частота изменения состояний нейронов («тактовая частота») не превышает 200Гц, тогда как частота изменения состояния элементов современного процессора может достигать нескольких ГГц (Гц).
Формальное описание сети Хопфилда
Сеть состоит из N искусственных нейронов, аксон каждого нейрона связан с дендритами остальных нейронов, образуя обратную связь. Архитектура сети изображена на рис. 2.
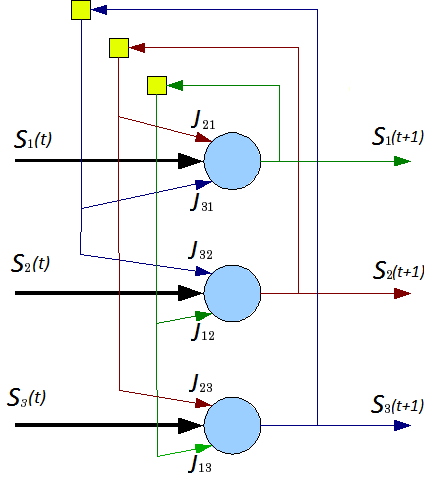
Рис.2 Архитектура нейронной сети Хопфилда
Каждый нейрон может находиться в одном из 2-х состояний:
где — состояние нейрона в момент
. «Возбуждению» нейрона соответствует
, а «торможению»
. Дискретность состояний нейрона отражает нелинейный, пороговый характер его функционирования и известный в нейрофизиологи как принцип «все или ничего».
Динамика состояния во времени -ого нейрона в сети из
нейронов описывается дискретной динамической системой:
где — матрица весовых коэффициентов, описывающих взаимодействие дендритов
-ого нейрона с аксонами
-ого нейрона.
Стоит отметить, что и случай
не рассматриваются.
Обучение и устойчивость к шуму
Обучение сети Хопфилда выходным образам сводится к вычислению значений элементов матрицы
. Формально можно описать процесс обучения следующим образом: пусть необходимо обучить нейронную сеть распознавать
образов, обозначенных
. Входной образ
представляет собой:
где
— шум, наложенный на исходный образ
.
Фактически, обучение нейронной сети — определение нормы в пространстве образов . Тогда, очистка входного образа от шума можно описать как минимизацию этого выражения.
Важной характеристикой нейронной сети является отношение числа ключевых образов , которые могут быть запомнены, к числу нейронов сети
:
. Для сети Хопфилда значение
не больше 0.14.
Вычисление квадратной матрицы размера для ключевых образов производится по правилу Хебба:
где означает
-ый элемент образа
.
Стоит отметить, что в силу коммутативности операции умножения, соблюдается равенство
Входной образ, который предъявляется для распознавания соответствует начальным данным для системы, служащий начальным условием для динамической системы (2):
Уравнений (1), (2), (3), (4) достаточно для определения искусственной нейронной сети Хопфилда и можно перейти к ее реализации.
Реализация нейронной сети Хопфилда
Реализация нейронной сети Хопфилда, определенной выше будет производиться на языке C++. Для упрощения экспериментов, добавим основные определения типов, напрямую связанных с видом нейрона и его передаточной функции в класс simple_neuron, а производные определим далее.
Самыми основными типами, напрямую связанными с нейроном являются:
- тип весовых коэффициентов (выбран float);
- тип, описывающий состояния нейрона (введен перечислимый тип с 2 допустимыми значениями).
На основе этих типов можно ввести остальные базовые типы:
- тип, описывающий состояние сети в момент
(выбран стандартный контейнер vector);
- тип, описывающий матрицу весовых коэффициентов связей нейронов (выбран контейнер vector контейнеров vector).
struct simple_neuron { enum state {LOWER_STATE=-1, UPPER_STATE=1}; typedef float coeff_t; <<(1) typedef state state_t; <<(2) ... }; typedef simple_neuron neuron_t; typedef neuron_t::state_t state_t; typedef vector<state_t> neurons_line; <<(3) typedef vector<vector<neuron_t::coeff_t>> link_coeffs; <<(4)
Обучение сети, или, вычисление элементов матрицы в соответствии с (3) производится функцией learn_neuro_net, принимающей на вход список обучающих образов и возвращающей объект типа link_coeffs_t. Значения
вычисляются только для нижнетреугольных элементов. Значения верхнетреугольных элементов вычисляются в соответствии с (4). Общий вид метода learn_neuro_net показан в листинге 2.
link_coeffs learn_neuro_net(const list<neurons_line> &src_images) { link_coeffs result_coeffs; size_t neurons_count = src_images.front().size(); result_coeffs.resize(neurons_count); for (size_t i = 0; i < neurons_count; ++i) { result_coeffs[i].resize(neurons_count, 0); } for (size_t i = 0; i < neurons_count; ++i) { for (size_t j = 0; j < i; ++j) { neuron_t::coeff_t val = 0; val = std::accumulate( begin(src_images), end(src_images), neuron_t::coeff_t(0.0), [i, j] (neuron_t::coeff_t old_val, const neurons_line &image) -> neuron_t::coeff_t{ return old_val + (image[i] * image[j]); }); result_coeffs[i][j] = val; result_coeffs[j][i] = val; } } return result_coeffs; }
Обновление состояний нейронов реализовано с помощью функтора neuro_net_system. Аргументом метода _do функтора является начальное состояние , являющееся распознаваемых образом (в соответствии с (5)) — ссылка на объект типа neurons_line.
Метод функтора модифицирует передаваемый объект типа neurons_line до состояния нейронной сети в момент времени . Значение жестко не фиксировано и определяется выражением:
т.е., когда состояние каждого нейрона не изменилось за 1 «такт».
Для вычисления (2) применены 2 алгоритма STL:
- std::inner_product для вычисления суммы произведений весовых коэффициентов и состояний нейронов (т.е. вычисление (2) для определенного
);
- std::transform для вычисления новых значений для каждого нейрона (т.е. вычисление пункта выше для каждого возможного
Исходный код функтора neurons_net_system и метода calculate класса simple_neuron показан в листинге 3.
struct simple_neuron { ... template <typename _Iv, typename _Ic> static state_t calculate(_Iv val_b, _Iv val_e, _Ic coeff_b) { auto value = std::inner_product( val_b, val_e, coeff_b, coeff_t(0) ); return value > 0 ? UPPER_STATE : LOWER_STATE; } }; struct neuro_net_system { const link_coeffs &_coeffs; neuro_net_system(const link_coeffs &coeffs): _coeffs(coeffs) {} bool do_step(neurons_line& line) { bool value_changed = false; neurons_line old_values(begin(line), end(line)); link_coeffs::const_iterator it_coeffs = begin(_coeffs); std::transform( begin(line), end(line), begin(line), [&old_values, &it_coeffs, &value_changed] (state_t old_value) -> state_t { auto new_value = neuron_t::calculate( begin(old_values), end(old_values), begin(*it_coeffs++) ); value_changed = (new_value != old_value) || value_changed; return new_value; }); return value_changed; } size_t _do(neurons_line& line) { bool need_continue = true; size_t steps_done = 0; while (need_continue) { need_continue = do_step(line); ++steps_done; } return steps_done; } };
Для вывода в консоль входных и выходных образов создан тип neurons_line_print_descriptor, который хранит ссылку на образ и формат форматирования (ширину и высоту прямоугольника, в который будет вписан образ). Для этого типа переопределен оператор <<. Исходный код типа neurons_line_print_descriptor и оператора вывода в поток показан в листинге 4.
struct neurons_line_print_descriptor { const neurons_line &_line; const size_t _width; const size_t _height; neurons_line_print_descriptor ( const neurons_line &line, size_t width, size_t height ): _line(line), _width(width), _height(height) {} }; template <typename Ch, typename Tr> std::basic_ostream<Ch, Tr>& operator << (std::basic_ostream<Ch, Tr>&stm, const neurons_line_print_descriptor &line) { neurons_line::const_iterator it = begin(line._line), it_end = end(line._line); for (size_t i = 0; i < line._height; ++i) { for (size_t j = 0; j < line._width; ++j) { stm << neuron_t::write(*it); ++it; } stm << endl; } return stm; }
Пример работы нейронной сети
Для проверки работоспособности реализации, нейронная сеть была обучена 2 ключевым образам:

Рис.3 Ключевые образы
На вход подавались искаженные образы. Нейронная сеть корректно распознала исходные образы. Искаженные образы и распознанные образы показаны на рис.4, 5
Рис.4 Распознавание образа 1


Рис.5 Распознавание образа 2
Запуск программы производится из командной строки строчкой вида: AppName WIDTH HEIGHT SOURCE_FILE [LEARNE_FILE_N], где:
AppNaame - название исполняемого файла; WIDTH, HEIGHT - ширина и высота прямоугольника, в который будут вписываться выходной и ключевые образы; SOURCE_FILE - исходный файл с начальным образом; [LEARNE_FILE_N] - один или несколько файлов с ключывыми образами (через пробел).
Исходный код выложен на GitHub -> https://github.com/RainM/hopfield_neuro_net
В репозитории проект CMake, из которого можно сгенерировать проект Visual Studio (VS2015 компилирует проект успешно) или обычные Unix Makefile’ы.
Использованная литература
- Г.Г. Малинецкий. Математические основы синергетики. Москва, URSS, 2009.
- Статья «Нейронная_сеть_Хопфилда» на Википедии.

