Всем привет. Любому автопилоту, очевидно, нужно не только принимать решения по управлению, но и заставлять автомобиль этим решениям подчиняться. Сегодня увидим, как весьма доступными средствами доработать обычный автомобиль полностью электронным рулевым управлением (steer-by-wire). Оказывается, сам авто для разработки не очень и нужен, а большинство функционала можно с комфортом отлаживать дома или в офисе. В главных ролях всем известные компоненты из хобби-магазинов электроники.

Задумаемся на секунду, что нужно для системы электронного управления? Сервопривод, который может поворачивать колёса, и контроллер, чтобы сервоприводом управлять. Внезапно, всё это в большинстве современных автомобилей уже есть, и называется "усилитель рулевого управления". Традиционные чисто механические (как правило, гидравлические) усилители стремительно исчезают с рынка, уступая место узлам с электронным блоком управления (ЭБУ). А значит, задача сразу упрощается: нам остается только "уговорить" имеющийся ЭБУ усилителя выдать нужные команды на сервопривод.
Очень удобным для доработки оказался KIA Cee'd начиная с 2015 модельного года (скорее всего аналогично и его соплатформенники от KIA/Hyundai). Сошлись одновременно несколько факторов:
- Усилитель руля полностью электрический, нет возни с гидравликой, стоит копейки (относительно) на разборках. Вся нужная проводка выведена наружу и легко доступна.
- Усилитель интегрирован с рулевой колонкой, поэтому к нему есть легкий доступ на автомобиле и любая дополнительная электроника останется в салоне в тепличных условиях (в отличие от усилителей, интегрированных в рулевую рейку).
- Очень важно — есть пример успешной доработки аналогичного KIA Soul. Американская PolySync разрабатывает апгрейд Soul до полностью drive-by-wire платформы для беспилотников, и на их гитхабе можно подсмотреть много полезного.
Итак, получена в распоряжение рулевая колонка в сборе:

Будем заставлять её крутиться. Для этого нужно создать у блока управления впечатление, что
- Он находится в автомобиле с работающим двигателем.
- Водитель прикладывает вращающее усилие к рулевому колесу.
Пойдем по порядку.
Симуляция автомобиля
Нужно понять интерфейс между электронным блоком управления (ЭБУ) усилителя и остальным автомобилем. Нагуглив электрическую схему видим картинку:
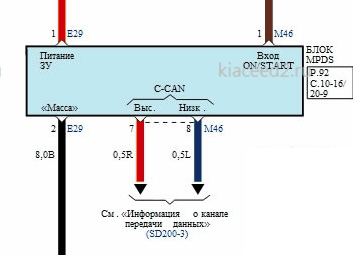
Из схемы видно, что физически интерфейс очень прост:
- Питание (12V постоянное) через разъем E29.
- Сигнал включенного зажигания (12V) через разъем M46.
- CAN-шина данных также через разъем M46.
Внешний вид и распиновки разъемов находим на том же сайте.
С питанием и зажиганием всё просто, берем 12V с обычного компьютерного блока питания. Но если просто подать питание и зажигание, усилитель полноценно не включится, и усиливать не будет. Дополнительно нужна информация от других блоков автомобиля: работает ли двигатель (чтобы не тратить энергию аккумулятора при выключенном), текущая скорость (чтобы делать руль "тяжелее" на скорости), наверняка что-то ещё.
Обмен данными между электронными блоками в современных автомобилях организован по шинам CAN (Controller Area Network). Это широковещательная (у пакетов нет адресов назначения) локальная сеть на витой паре, где каждый блок может публиковать свои данные. У каждого типа данных свой идентификатор. Например, в нашем случае усилитель руля рассылает значения угла поворота руля с ID 0x2B0. Часто бывает несколько физически разделенных шин, чтобы второстепенные блоки типа контроллеров стеклоподъемников не мешались обмену между критически важными компонентами. В Cee'd используется две шины: C-CAN и B-CAN (схема здесь, в части "Информация о канале передачи данных"). На C-CAN "висят" почти все блоки с ней и будем работать.
Выбор адаптера CAN-шины
Первым делом понадобится CAN интерфейс для компьютера. Детальный обзор возможных решений есть например здесь, цены варьируются от десятков до сотен долларов. По устройствам у нас относительно доступны:
- Адаптеры в сборе с алиэкспресса. Их не пробовал, по слухам довольно много брака и софт видимо только под Windows.
- Arduino шилды на MCP2515/MCP2551, в основном клоны дизайна от seeed в любом магазине ардуинной тематики. Но совмещать такой шилд надо не с Arduino (я так и не смог заставить связку работать на воспроизведение с нужной скоростью), а с Raspberry Pi. В приложении ниже подробная инструкция.
- USB адаптер CANHacker Baby, разработка Artemka86. Выгодно отличается от вариантов с алиэкспресса отличной поддержкой "из первых рук" от разработчика (проверено лично, Артём подходит к делу с душой). Также плюсом является поддержка стандартного протокола LAWICEL совместимого с широким набором софта.
Софта разного тоже много (за обзором опять сюда). Самый простой вариант — Linux c can-utils из SocketCAN, за который спасибо инженерам Volkswagen. Большой плюс SocketCAN в стандартизации — любое USB устройство с поддержкой протокола LAWICEL (pdf) видится системой как обычный сетевой интерфейс. Таким образом избегаем привязки к вендор-специфическому софту конкретного устройства. У текущей версии CANHacker есть небольшая несовместимость со стоковыми can-utils по работе с USB, поэтому берём патченную версию отсюда. Raspberry Pi с CAN шилдом работает со стоковым пакетом can-utils из Raspbian OS без проблем.
Подключение к шине, запись пакетов
С подключением к индивидуальному узлу на стенде всё просто: соединяем контакт CAN-High адаптера с CAN-High автомобильного узла, CAN-Low — c CAN-Low. По стандарту между CAN-High и CAN-Low должно быть 2 замыкающих резистора по 120 Ом, на практике обычно всё работает на довольно широком интервале сопротивлений, у меня например одно на 110 Ом.
На автомобиле замыкающий резистор не нужен (они там уже стоят, чтобы шина сама по себе работала). В зависимости от модели авто, возможно придется повозиться с физическим доступом к проводке шины. Самый удобный вариант — разъём OBD-II (on-board diagnostic), он обязателен на всех легковых автомобилях, выпущенных в Европе с начиная 2001-2004 года и находится не дальше 60 см от рулевого колеса. На Cee'd разъём слева под рулём, за пластмасовой крышкой блока предохранителей.

Распиновка OBD-II стандартизована и включает шину CAN (CANH на 6 контакте, CANL на 14). Нам повезло, корейцы пошли по пути наименьшего сопротивления и вывели C-CAN, на которой висят все важные узлы, прямо на диагностический разъём:
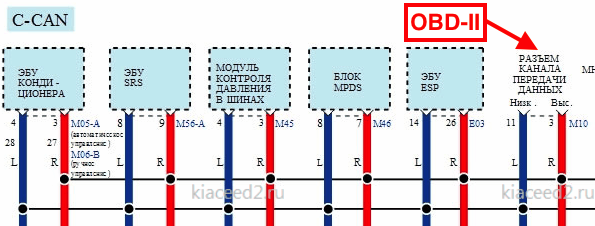
В результате на Cee'd можно прослушать весь внутренний трафик, ничего в авто не разбирая. Когда машина не твоя, а знакомые пустили повозиться — большой плюс. Но такая халява не везде. У Volkswagen например служебная CAN изолирована от OBD шлюзом, поэтому подключаться пришлось бы примерно так:

Подключив все контакты, поднимаем сетевой интерфейс:
$ sudo slcand -o -c -s6 -S 115200 ttyACM0 slcan0 && sleep 1 && sudo ifconfig slcan0 up
Проверяем, что сеть работает и данные принимаются (включив зажигание):
$ cansniffer slcan0
И наконец, если всё нормально, можно записывать лог:
$ candump -L slcan0 > real-car-can-log.txt
Здесь нужно запустить двигатель, т.к. усилитель руля включается на собственно усиление только при работающем двигателе, а нам на стенде надо, чтобы он усиливал.
Воспроизведение записи шины на стенде
С записанным логом с авто можно возвращаться на стенд и приступать к обману нашего одинокого усилителя. Первым делом вспомним, что в автомобиле стоит свой собственный усилитель, он тоже шлёт данные в CAN шину, и эти пакеты есть и в нашем логе. Отфильтруем их, чтобы избежать конфликтов. Подключаемся к усилителю на стенде, смотрим, что он выдает:
$ $ candump slcan0 slcan0 2B0 [5] 00 00 00 00 00 slcan0 2B0 [5] FF 7F FF 06 F1 slcan0 2B0 [5] FF 7F FF 06 C2 slcan0 2B0 [5] FF 7F FF 06 D3 slcan0 2B0 [5] FF 7F FF 06 A4 slcan0 2B0 [5] FF 7F FF 06 B5 slcan0 2B0 [5] FF 7F FF 06 86 slcan0 2B0 [5] FF 7F FF 06 97 slcan0 2B0 [5] FF 7F FF 06 68 slcan0 5E4 [3] 00 00 00 slcan0 2B0 [5] FF 7F FF 06 79 slcan0 2B0 [5] FF 7F FF 06 4A ....
Видим, что рассылаются пакеты 2B0 (текущий угол поворота руля) и, реже, 5E4 (какой-то общий статус усилителя). Отфильтровываем их из общего лога:
$ cat real-car-can-log.txt | grep -v ' 2B0' | grep -v ' 5E4 ' > can-log-no-steering.txt
Фильтрованный лог можно подавать на воспроизведение:
% sudo ifconfig slcan0 txqueuelen 1000 $ canplayer -I can-log-no-steering.txt
Если всё сработало успешно, усилитель заработает, крутить рукой рулевой вал станет гораздо легче. Итак, работать в штатном режиме мы узел заставили, можно переходить к симуляции усилий на руле.
Эмуляция усилия на руле
Крутящий момент на рулевом валу и угол поворота измеряются встроенным блоком датчиков, от которого идет жгут проводов к блоку управления усилителем:

Блок управления обрабатывает сигналы датчиков и выдаёт команды сервоприводу на создание дополнительного усилия на поворот рулевого вала.
Проверка формата сигнала датчиков
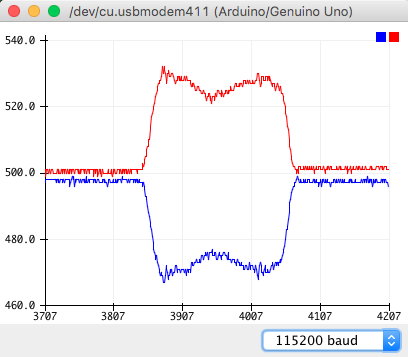
По информации PolySync, на Soul, у которого с Cee'd общая платформа, два аналоговых датчика крутящего момента. Cигнал каждого — отклонение уровня постоянного напряжения от базовых 2.5V, провода в жгуте — зеленый и синий. Проверим, что у нас то же самое:
- Размыкаем разъем на ЭБУ, пробрасываем нужные контакты через макетку и заводим на аналоговые входы arduino.

- Загружаем скетч, в цикле замеряющий напряжения и печатающий их в терминал.
- Запускаем Serial Plotter в Arduino IDE, поворачиваем рулевой вал. Видим результат на графике, схема совпадает с Soul:
- Радуемся сэкономленному времени.
Эмуляция сигнала датчиков
Переходим к эмуляции сигнала датчиков. Для этого поставим свой модуль в разрыв цепи между датиком и ЭБУ, будем транслировать настоящий сигнал с датчика и по команде сдвигать его на фиксированный уровень (изображая приложенное к рулевой колонке усилие). Силами одной arduino это не получится: там нет полноценного цифро-аналогового преобразователя, который мог бы выдавать постоянное напряжение. Аналоговые входы arduino нам тоже не очень подходят — хотя пинов для них целых 6, канал АЦП в контроллере только один, и его переключение между пинами занимает заметное время.
Нужно добавить к arduino внешние ЦАП/АЦП. Мне попались модули YL-40 (описание в pdf) на основе чипа PCF8591 — на каждой по 4 канала 8-бит АЦП и 1 8-бит ЦАП. Модуль может общаться с arduino по протоколу I2C. Потребуется небольшое допиливание (в буквальном смысле): китайские товарищи поставили на плату светодиод индикации напряжения на выходе ЦАП — его обязательно надо отсоединить. Иначе утекающий через диод ток не даст ЦАП поднять напряжение на выходе больше 4.2V (вместо штатных 5V). Диод отсоединяем, отковыривая резистор R4 с обратной стороны платы.

Также на входы распаяны игрушечные нагрузки (терморезистор, фоторезистор, ещё что-то), отсоединяем их, убирая перемычки, чтобы не мешались.

С интерфейсом к arduino есть нюанс — нам нужно 2 канала ЦАП, соотвественно 2 модуля, но у них одинаковые адреса I2C (зашиты в чип). Хотя чип позволяет менять свой I2C адрес, замыкая определенные ноги на +5V вместо земли, на плате эти перемычки не разведены. Вместо перепайки возьмем костыль — две разные библиотеки I2C на arduino (стандартная Wire и SoftI2CMaster), каждая на свою пару пинов. Получаем модули на разных шинах, конфликт пропадает.
Остальное прямолинейно — ставим модули в разрыв цепи от датчиков, соединяем с arduino, загружаем скетч. Подробности по распиновке подключения есть в комментариях в скетче. Остается включить всё в сборе, здесь важна последовательность:
- Включаем arduino, открываем Serial Monitor. Важно запустить arduino первой, не останавливать и не прерывать. Иначе напряжение на выходах ЦАПов сбросится, ЭБУ усилителя определит ошибку сигнала с датчиков, уйдет в безопасный редим и придется все перезапускать по новой.
- Запитываем усилитель, подключаем зажигание.
- Запускаем воспроизведение лога CAN-шины.
- Теперь по командам
lиrчерез Serial Monitor усилитель будет поворачивать рулевой вал. Объявляется победа.
На сегодня всё, на очереди доработка софта (интеграция с CAN шиной, чтение оттуда текущего угла поворота и динамическое управление крутящим усилием, чтобы внешний контроллер мог задать фиксированный угол поворота руля и система его выдерживала), отработка на автомобиле (на стенде не смоделируешь сопротивление от колёс). Возможно замена 8-битных ЦАП/АЦП на 10 или 12 бит (взял первое, что под руку попалось). Рулящая нейросеть тоже в процессе, надеюсь скоро сделать пост.
Спасибо Artemka86 за ценные консультации по работе с CAN и помощь с оборудованием.
Ресурсы для дальнейшего погружения
- Car Hacking: The definitive source. Начинать можно с Car Hacking for Poories, там отлично покрыты основы. Остальное тоже интересно, но с упором на несанкционированный доступ.
- The Car Hacker's Handbook: A Guide for the Penetration Tester. Больше деталей, чем в Car Hacking: The definitive source, тоже акцент на несанкционированный доступ. Если читать как первое введение в тему, надо приспособиться пропускать большие куски.
- Car Hacking 101: Tools of the Trade, MCD Software — обзоры инструментов. В основном малоинтересная экзотика на мой взгляд.
- Open Source Car Control — открытая платформа для KIA Soul, в процессе разработки. Они делают полное решение (руль, акселератор, тормоза), включвя доработки по "железу" на машине (в основном для тормозов — ставятся дополнительные тормозные приводы, что-то меняется в тормозной гидравлике итд). Релиза ещё не было, но многие вещи уже можно подсмотреть.
Бонус. Совмещаем Raspberry Pi и Arduino CAN shield
Прежде всего, внимание, CAN шилд и raspberry pi нельзя соединять напрямую, они не совместимы по напряжению. На Arduino UNO-совместимых платах напряжение логики 5V, а на raspberry pi только 3.3V, поэтому прямое соединение только сожжет задействованные пины.
Нам понадобятся:
- Raspberry Pi (проверялось на версии 3B).
- Arduino CAN шилд на MCP2515/MCP2551.
- Преобразователь уровня логики на 5 каналов или больше (можно 2 по 4 канала, но понадобится больше соединений). Мне попался этот
Нужно завести на CAN шилд питание (5V), соединения интерфейса данных SPI (4 пина: MOSI, MISO, SCLK, CS) и 1 пин сигнала прерывания. Всё, кроме питания, идет через преобразователь уровня, который в свою очередь тоже надо запитать.
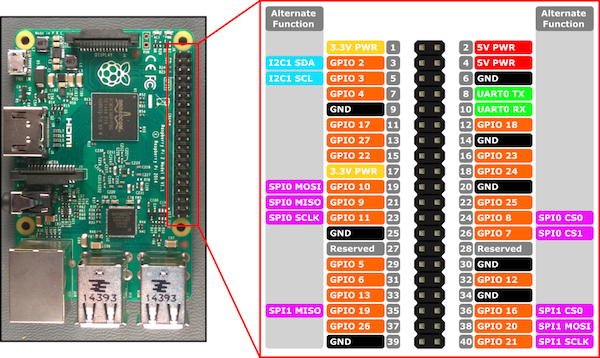
На схемах ищем нужные пины.
Raspberry Pi:
CAN шилд:
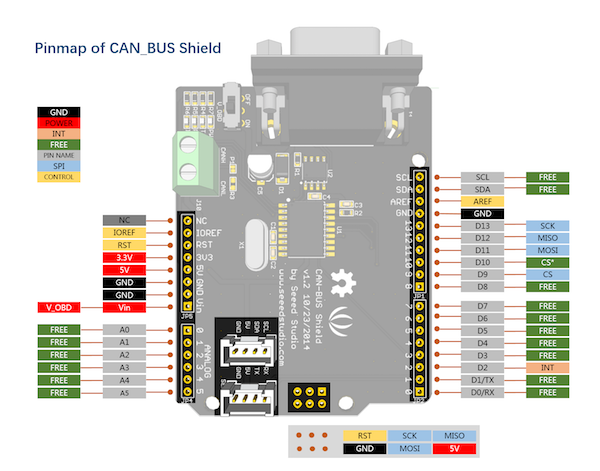
Получаем результат:
- SPI на raspberry pi 19, 21, 23, 24 (MOSI, MISO, SCLK, CS) соответствуют D11, D12, D13, D9 (или на некоторых версиях D10) на CAN шилде.
- Прерывание с D2 на шилде можно завести на любой GPIO пин raspberry, у меня это пин 22 (GPIO 25). Номер пина укажем в софте при настройке.
Соединяем через преобразователь, заводим нужные напряжения питания на каждую сторону преобразователя, получается такая лапша:

Всё, кроме 5V питания и земли на шилд идёт через преобразователь:

Переходим к настройке софта (стандартный Raspbian).
Включаем поддержку SPI и CAN модуля. В
/boot/config.txtдобавляем
dtparam=spi=on dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25,spimaxfrequency=1000000 dtoverlay=spi0-hw-cs
Здесь
interrupt=25указывает пин, на который заведено прерывание с шилда. Индексация идёт по GPIO пинам, поэтомуinterrupt=25это GPIO 25, он же пин 22 по сквозной индексации всех пинов. Также важно указать частоту интерфейса SPIspimaxfrequency, т.к. значение по умолчанию — 10 МГц — слишком высокое для шилда, он просто не соединится.
Перезагружаем raspberry pi, проверяем соединение с шилдом:
$ dmesg ... [ 12.985754] CAN device driver interface [ 13.014774] mcp251x spi0.0 can0: MCP2515 successfully initialized. ...
Устанавливаем
can-utils:
$ sudo apt install can-utils
Запускаем виртуальный сетевой интерфейс:
$ sudo /sbin/ip link set can0 up type can bitrate 500000 $ sudo ifconfig can0 txqueuelen 1000
Вторая команда важна при воспроизведении большого количества данных с raspberry pi, то есть когда записанный на автомобиле полный лог CAN шины воспоизводим для изолированного узла на стенде. Без увеличения буфера он скорее всего переполнится, когда в логе встретится несколько CAN пакетов с маленькими интервалами, и тогда соединение зависнет.
- Готово, можно пользоваться
candump,cansnifferи всем остальным изcan-utils.

