
Как же нам не любить аниматронику? Отогните силиконовую кожу любой куклы, и вам откроется скопление мехатронной магии, дающей ей жизнь на большом экране. Я искал в интернете хорошие вводные материалы на эту тему, но нашёл лишь один – обучающие видео от Стэна Уинстона. Уже через 30 секунд я почувствовал, как щупальца пробуждают мои самые низменные позывы к постройке осязаемых вещей. Я запал, я просто обязан был построить одну такую штучку… или несколько. И вот, как можно создать вполне реальное аниматронное щупальце.

Начинающим на самом деле лучше начать погружение с обучалок от Стэна Уинстона. За два часа инструктор Ричард Лэндон описывает общую суть, набор необходимых компонентов и техники изготовления механизма щупальцев при помощи набора типичных инструментов – не говоря уже о кучке замечательных примеров из кино. [1]
Также мы получаем возможность заглянуть одним глазком в мир изготовления более сложных устройств на базе тех же принципов. Я бы хотел начать повествование с того момента, как он заканчивает – с двухступенчатых щупальцев, гнущихся на 4 стороны. Кроме того, я внесу одно изменение в дизайн щупалец от Лэндона. Оно позволит вам построить собственное щупальце и контролер всего лишь из нескольких готовых компонентов, полиформальдегида [derlin] и лазерного резака… Ладно, и ещё из парочки частей, напечатанных на 3D-принтере.
Как работают двухступенчатые щупальца
hackadaycom.files.wordpress.com/2016/08/tentacle_arc_aproximation.png
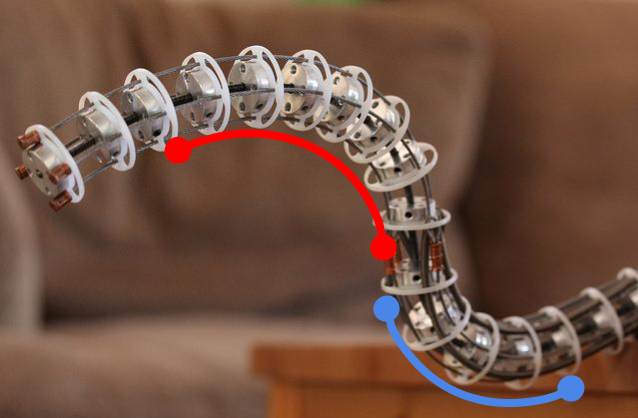
Обе ступени щупальца, у каждой из которых есть две степени свободы
У щупальца есть две ступени, у каждой из которых есть две степени свободы. Они позволяют каждой ступени изгибаться в двух перпендикулярных направлениях. Комбинируя эти степени свободы, в сумме мы получаем четыре, позволяющие нам эмулировать вполне правдоподобные органические движения. На анимации, присмотревшись, можно увидеть место соединения двух ступеней – примерно посередине щупальца.
При хорошей сборке мы можем контролировать обе части независимо друг от друга. В идеале. В реальности нет ничего идеального, и у наших материалов есть свои ограничения. Нам необходимо будет поиграть натяжением и межпозвоночным расстоянием, пока мы не достигнем удовлетворительных результатов.

В идеале, потянув за трос любой из ступеней, мы добьемся идеальной дуги, уменьшающейся в диаметре при увеличении натяжения. Но из-за потерь на трение в каждом из позвонков мы не сможем достичь идеальной дуги, хотя результат будет достаточно неплохим для того, чтобы обмануть людей, находящихся по ту сторону экрана.
Среди доступных нам поз щупальца нет поворота вокруг его оси. Это сделано специально, так как кукольники прошлого рассматривали подобные движения, как неестественные – например, для кошачьих хвостов или слоновьих хоботов. [1].
Набросок щупальца
Чтобы понять принцип работы, построим грубое щупальце из двух пластин и гибкого сердечника. Вот чертёж нашего зародыша:
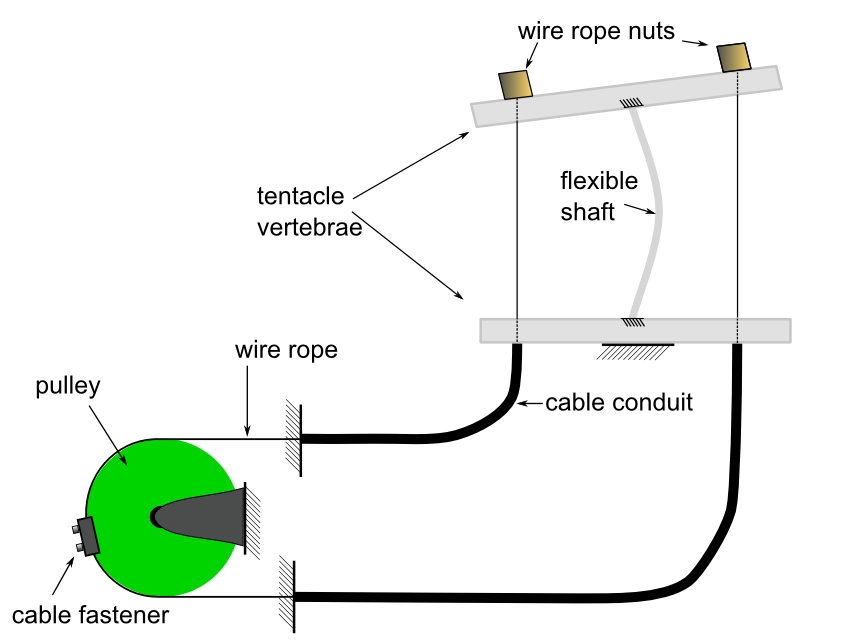
Придавая вращение шкиву, мы ослабляем один трос и натягиваем на то же расстояние другой. Укорачивание длины загибает щупальце в сторону провода. Поскольку тросы передают только натяжение, их нужно делать в паре с дополняющими, чтобы обеспечить движение по полной амплитуде в обе стороны по одной из степеней свободы. Поэтому нам придётся работать с 8 различными тросами.
Щупальце держит форму из-за двух его особенностей. Во-первых, канал троса [cable conduit] сопротивляется сжатию. Во-вторых, тросы преднатянуты и жёстко соединены со шкивом. Изменение длины троса – единственный способ перемещения позвонка, а канал троса не меняет длину. Поэтому фиксация шкива фиксирует и щупальце.
Роль канала троса
Канал троса играет важную роль в проекте. Без него движение верхней ступени приводило бы к паразитным движениям нижней, а это нам не нужно. Нам нужно независимо управлять обеими ступенями.
Канал троса позволяет перенаправлять приложение сил с одного конца канала на другой без появления паразитных воздействий. Канал должен оставаться гибким, и при этом сопротивляться сжатию.
Интересно, что при нашей схеме мы можем взяться за любую точку канала троса и двигать её без сопротивления, поскольку:
1. Канал гибкий.
2. Его центральная часть, по которой идёт трос, не меняет длины.
Изгибы канала не меняют его длины, поэтому мы можем его гнуть как угодно, а щупальце останется неподвижным. Удобненько!
Это позволяет нам делать сразу две вещи: протянуть управляющие верхней ступенью тросы через нижнюю ступень, и контролировать верхнюю ступень через нижнюю, при этом не влияя на последнюю.
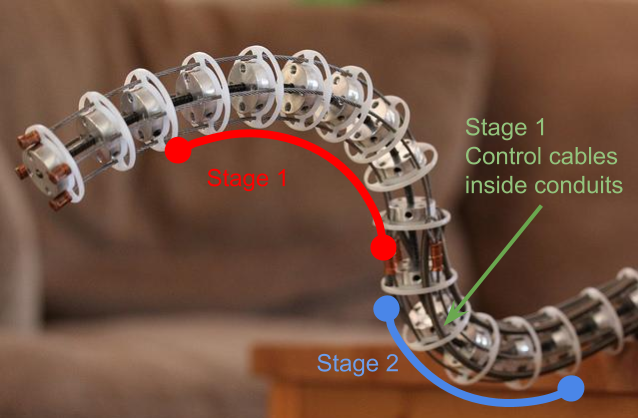
На изображении видно, что управляющие 1-й ступенью тросы проходят через 2-ю ступень.
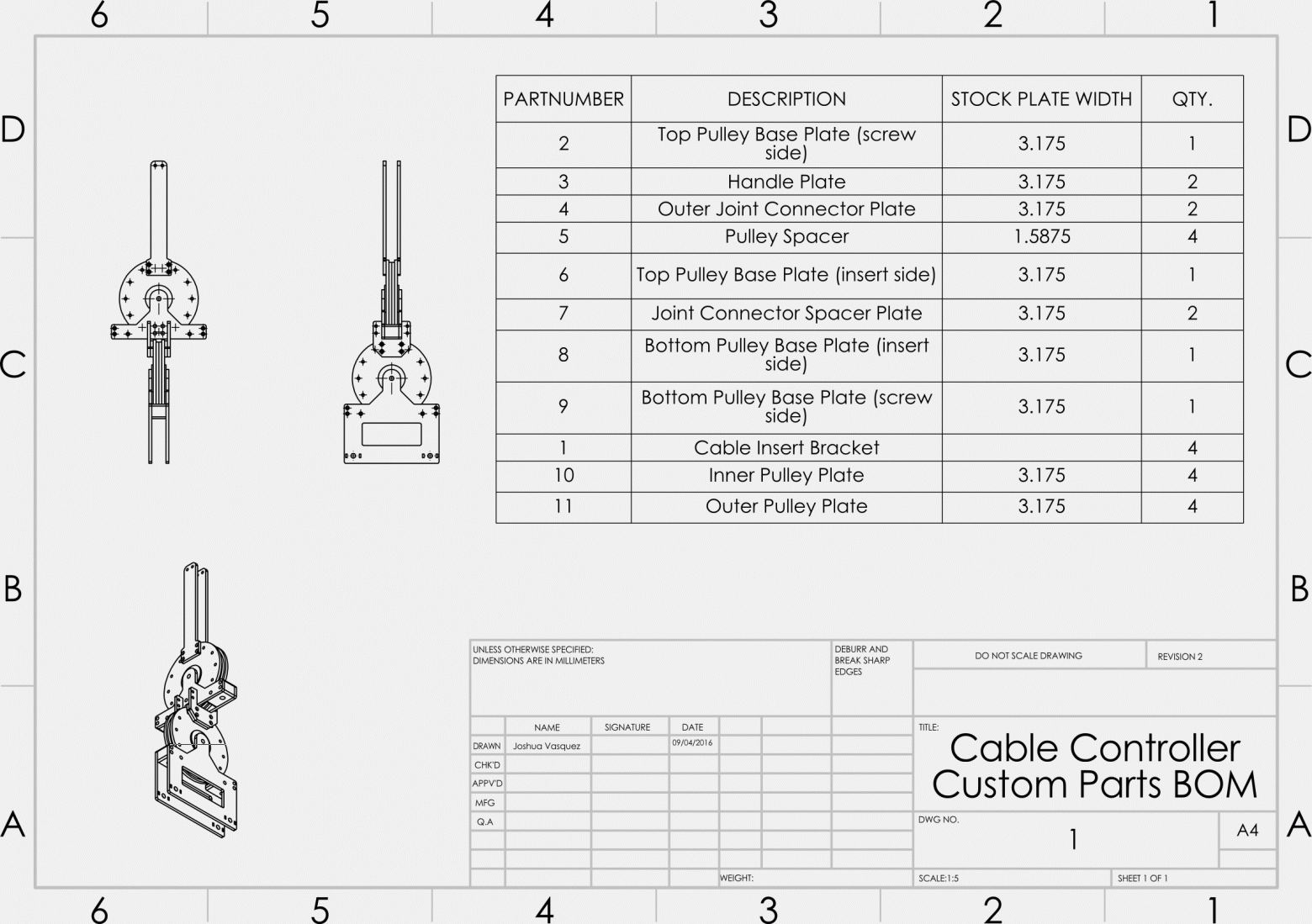
Запчасти
Основной материал

Плавные движения вдоль всех степеней свободы достигаются постройкой щупальца из материалов, сопротивляющихся вращению вокруг его оси. Большинство людей используют тросики для спидометров от старых машин, обладающих именно таким свойством. [1] Я тоже в первый раз использовал такие тросы. К сожалению, их диаметр только один: 0,125 дюйма, из-за чего нельзя сделать большую куклу, которая не изгибается под собственным весом. Теперь я предпочитаю гибкие валы от крутящих инструментов. Но большинство изображений в этой статье сделаны с использованием тросиков от спидометров.
Сегменты

Каждый сегмент-позвонок необходимо жёстко зафиксировать, дабы он не скользил и не вертелся. Они должны правильно направлять трос, и в нужных местах – канал троса, при этом будучи жёстко соединёнными с тросиком спидометра. Лэндон использует для этого алюминиевые детали, сделанные на станке с ЧПУ. Но я, покопавшись в магазинах, нашёл более простой выход с использованием готовых компонентов. Сегодня запчасти для роботов благодаря распространённости этого хобби весьма популярны, и я смог сделать позвонки из универсальной втулки от Pololu [Pololu Universal Aluminum Mounting Hub] и пластины из полиформальдегида [derlin].
Управляющий трос

Управляющий трос возьмём такой же, как на велосипедах, но правда, потоньше. Я успешно использовал два диаметра тросов – 1,2 мм и 0,8 мм. Можно использовать дорогие тросы, которые при изготовлении обрабатывают так, что они не лохматятся, или же просто накалить до свечения обрезанный конец троса. [3]
Канал троса
Для канала вариантов много – нейлоновые трубки, оплётка от велосипеда, пружины. Нам нужно лишь, чтобы канал сопротивлялся сжатию и был гибким. Сопротивление сжатию должно обеспечивать «равное и противонаправленное» усилие для движения.

Гибкость нужна, чтобы канал не мешал другим секциям щупальца сгибаться. Для одноступенчатых механизмов подойдёт любой из перечисленных вариантов. Для многоступенчатых гибкость важнее. Пока что по моему опыту лучше всего подошли пружины, работающие на растяжение, как наиболее гибкие из всех материалов.
В магазине McMaster-Carr можно купить что угодно, если знать правильное название. Наш канал для троса называется «continuous length extension spring» (9664K12) и стоит всего $4,40 за 36 дюймов. [300 руб/м]
Пружины диаметром поменьше можно заказать у Dr. Templeman and Co. Стоимость пружин будет побольше, но зато и ассортимент побогаче. Совсем малые диаметры можно найти у Molex.
Точка сгиба

В первый раз мне было довольно трудно представить себе конструкцию этого элемента. Тем не менее, поняв расположение окончаний тросов, эту деталь сконструировать просто. Каждый трос, управляющий нижней секцией, оканчивается петлёй. На том же позвонке оканчиваются и каналы троса, содержащие следующий набор управляющих тросов. Оттуда продолжается следующий набор тросов.
Альтернативные конструкции
Не могли бы мы использовать для позвонков другой материал, например, дерево – чтобы сэкономить на металлических втулках? Возможно, но такой дизайн сделан не просто так, а с расчётом.
Во-первых, сложность дизайна необходимо балансировать либо готовыми деталями, либо доступным методом изготовления (лазерный резак и 3D-принтер). Поэтому такую конструкцию могут сделать даже люди с нетипичными глазомером и ловкостью.
Во-вторых, технология изготовления прототипов должна быть детерминистской и повторяемой. Устройство должно вести себя одинаково, будучи изготовленным в любой части света. Не нужно практиковать магию и молиться богам клея, стоя на одной ноге, пока ваша эпоксидка застывает при каком-нибудь необычном уровне влажности. Простые технологии, ведущие себя одинаково везде и всегда.
Но ищите альтернативы дизайна сами. Я доработал контроллер и щупальце, но это не значит, что работа завершена. К моменту завершения третьей части статьи в ваших руках будет вся разработка, и вы сможете делать с ней, что захотите.
Часть 2
Ссылки
[1] Stan Winston Cable Mechanism Basics
Подробный обучающий материал по созданию простых щупалец
[2] Animatronics Demo with Rick Lazzarini 1:21:01
Примеры использования тросиков от спидометров
[3] CS235: Applied Robot Design, Lecture 7-Introduction to Cable Transmissions
Введение по использованию тросов в роботостроении


{kind=link}