
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Скажите пожалуйста, как сдвинуть камеру относительно системы координат робота.
Вот, на рисунке изображено положение кинекта и начало СК робота
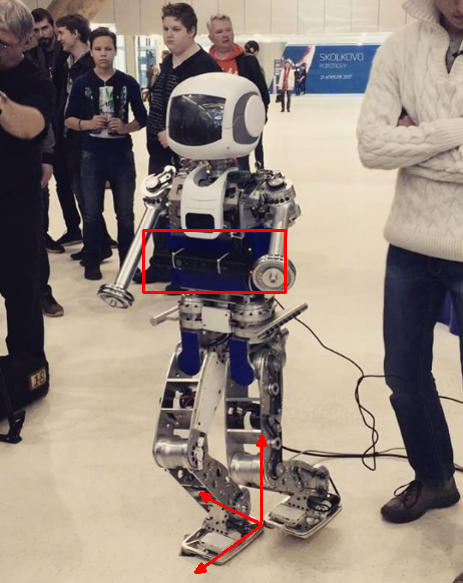
Т.е. хотелось бы получать координату не камеры, а СК робота. Пытался вставить промежуточный фрейм между map, odom и фреймами камер, но особо не вышло, rtabmap ломается.
Локализация и навигация в ROS с использованием rtabmap