Не так давно я озаботился вопросом, как бы сделать привод для систем ЧПУ на коллекторном двигателе, да еще и с обратной связью, и что бы работал по Modbus RTU.
В распоряжении у меня имелись, Arduino UNO, Драйвер на L298N, коллекторный двигатель от привода сиденья автомобиля марки AEG на 12В, щелевой фотопрерыватель 2 шт.
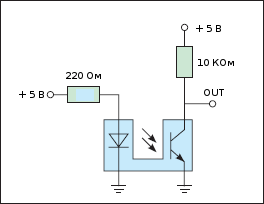
С начала я спаял платку с 2-мя фотопрерывателями, вот по такой схеме.
В готовом виде это всё выглядит так:

Суть данной некрасивой вещи — спичка пересекает с начала первый прерыватель, потом второй, так микроконтроллер понимает в какую сторону вращается мотор.
Все соединения выглядят так:
d2 — первый фотопрерыватель;
d3 — второй фотопрерыватель;
d5 — выход шим для вращения влево;
d6 — выход шим для вращения вправо;
Всё было соединено и я засел за написание кода, в итоги муки мои родили следующее:
А теперь дело за частью на компьютере. Что бы это все двигать была выбрана SinplLight SCADA, парни дают её самодельщикам бесплатно. Итак — вот так выглядят настройки в скаде.



Интерфейс был сделан такой:

В итоге получили подчинение двигателя ползунку в скаде, разгоняется и тормозит двигатель плавно, если вручную прокручивать якорь мотора, он не дает этого делать, и возвращается назад. Спасибо за внимание. И вот общий вид на беспорядок.

В распоряжении у меня имелись, Arduino UNO, Драйвер на L298N, коллекторный двигатель от привода сиденья автомобиля марки AEG на 12В, щелевой фотопрерыватель 2 шт.
С начала я спаял платку с 2-мя фотопрерывателями, вот по такой схеме.
В готовом виде это всё выглядит так:
Суть данной некрасивой вещи — спичка пересекает с начала первый прерыватель, потом второй, так микроконтроллер понимает в какую сторону вращается мотор.
Все соединения выглядят так:
d2 — первый фотопрерыватель;
d3 — второй фотопрерыватель;
d5 — выход шим для вращения влево;
d6 — выход шим для вращения вправо;
Всё было соединено и я засел за написание кода, в итоги муки мои родили следующее:
#include <ModbusRtu.h>
#define ID 1
//Задаём ведомому адрес, последовательный порт, выход управления TX
Modbus slave(ID, 0, 0);
int8_t state = 0; //состояние соединения
uint16_t au16data[11];// массив данных modbus
#include <PID_v1.h> //биилиотека и настройки ПИД регулятора
double Setpoint1, Input1, Output1;
double Setpoint2, Input2, Output2;
double Kp = 1, Ki = 2.5, Kd = 0.5;
PID myPID1(&Input1, &Output1, &Setpoint1, Kp, Ki, Kd, DIRECT); //1-й вращает в одну сторону
PID myPID2(&Input2, &Output2, &Setpoint2, Kp, Ki, Kd, REVERSE); //2-й вращает в другую
int LeftPWM = 5; //шим вращения в одну сторону
int RightPWM = 6; //шим вращения в другую сторону
volatile byte EncA, EncB = 0; //переменные для работы с прерываниями
volatile int Position = 0; //текущая позиция мотора
int SetPosition = 0; //в какую позицию поставить мотор
void setup()
{
slave.begin(9600);
pinMode (LeftPWM, OUTPUT);
pinMode (RightPWM, OUTPUT);
attachInterrupt(0, ChangePosition1, FALLING); // привязываем 0-е(pin2) прерывание к функции ChangePosition1()
attachInterrupt(1, ChangePosition2, FALLING); // привязываем 1-е(pin3) прерывание к функции ChangePosition2()
Setpoint1 = 0;
Setpoint2 = 0;
digitalWrite (LeftPWM, LOW);
digitalWrite (RightPWM, LOW);
}
//обработка прерывания 0
void ChangePosition1() //кто долго мучался с энкодером вот вам простой код для понимания!
{
EncA = 1;
if (EncA == 1 && EncB == 1)
{
EncA = 0;
EncB = 0;
Position++;
}
}
//обработка прерывания 1
void ChangePosition2()
{
EncB = 1;
if (EncA == 1 && EncB == 1)
{
EncA = 0;
EncB = 0;
Position--;
}
}
void loop()
{
//Работа с ModBus
// обработка сообщений
state = slave.poll(au16data, 11);
//Запись в регистры
au16data[2] = Position;//текущее положение
//Чтение из регистров
SetPosition = au16data[3];//установить положение
//Запись служебных регистров
au16data[8] = slave.getInCnt(); //входящих пакетов
au16data[9] = slave.getOutCnt(); //исходящих пакетов
au16data[10] = slave.getErrCnt();//ошибок
if (SetPosition == Position) //если нужная позиция равна текущей
{
myPID1.SetMode(MANUAL);
myPID2.SetMode(MANUAL);
Output1 = 0;
Output2 = 0;
digitalWrite (LeftPWM, LOW);
digitalWrite (RightPWM, LOW);
}
if (SetPosition < Position)
{
myPID2.SetMode(AUTOMATIC);
Setpoint2 = SetPosition;
Input2 = Position;
myPID2.Compute();
analogWrite (LeftPWM, Output2);
digitalWrite (RightPWM, LOW);
}
if (SetPosition > Position)
{
myPID1.SetMode(AUTOMATIC);
Setpoint1 = SetPosition;
Input1 = Position;
myPID1.Compute();
analogWrite (RightPWM, Output1);
digitalWrite (LeftPWM, LOW);
}
}А теперь дело за частью на компьютере. Что бы это все двигать была выбрана SinplLight SCADA, парни дают её самодельщикам бесплатно. Итак — вот так выглядят настройки в скаде.
Интерфейс был сделан такой:
В итоге получили подчинение двигателя ползунку в скаде, разгоняется и тормозит двигатель плавно, если вручную прокручивать якорь мотора, он не дает этого делать, и возвращается назад. Спасибо за внимание. И вот общий вид на беспорядок.

