С древних времен людям важно определять свое местоположение в пространстве, чтобы проложить маршрут до цели или просто вернуться домой. В современном мире мы уже не ориентируемся по солнцу и звездам, чтобы понять, где находимся мы или целевой объект. Просто достаем смартфон и получаем всю необходимую информацию: где курьер с едой, далеко ли заказанное такси, сколько времени пробираться сквозь пробки на работу и каков оптимальный путь.
Все это было бы невозможно без эволюции технологий, систем спутниковой и сотовой связи, а также методов, которые вычисляют местоположение мобильных объектов. О них и поговорим далее. Я Надежда Никулина, ведущий системный аналитик в телеком-команде YADRO. Давно работаю в сфере телекоммуникаций, участвовала в развитии сетей 2G и 3G в России, обеспечивала разработку узлов связи. В статье расскажу, как развивались методы определения позиционирования объектов и почему будущее за гибридными методами и технологиями 5G.

До нашей эры: как и зачем наши предки определяли свое местоположение
Умение определять свое положение в пространстве было актуально еще на самых ранних этапах зарождения цивилизации — вне зависимости от того, оседлые были народы или кочевые. Человеку было важно понимать, как вернуться домой после охоты, найти соплеменников или составить маршрут до цели — богатого живностью леса или удачного места для зимовки.
Для определения местоположения использовались наземные и космические ориентиры. Если наземные — камень определенный формы, дерево, водоем — работали в основном на знакомой местности, то положение звезд и солнца помогали ориентироваться там, где человек еще не был. Это умение позволяло открывать новые территории и составлять первые карты.
Несмотря на скудность ориентиров, некоторые народы овладели искусством навигации на высоком уровне еще тысячелетия назад. Полинезийские мореплаватели задолго до Колумба и его экспедиции через Атлантику могли преодолевать тысячи километров в открытом Тихом океане на деревянных каноэ. В качестве ориентиров они использовали Солнце, звезды, ход течений, направление ветра, поведение птиц.
Инструменты
С развитием человечества стали появляться первые инструменты, помогающие ориентироваться на местности. Так, в 5-7 веках до н.э. в Древней Греции изобрели астролябию. Это необычное изобретение помогало измерять высоту Солнца и звезд над горизонтом. Зная угловое положение Солнца в отношении к небесному экватору, мореплаватели определяли, на какой географической широте находится их судно.

Первые представления о привычных нам географических координатах — широте и долготе — появились во 2 веке до н.э., также в Древней Греции. В целом, понимание, что определение местоположения возможно посредством объединения или наложения разных данных о позиции объекта, сформировалось достаточно давно. В 90-160 годах нашей эры Клавдий Птолемей предложил математически точную концепцию координат и аккумулировал существующие знания в 8 томах книги «География».
В XIII веке астролябию заменил секстант — этот инструмент позволял точно определить географическую широту объекта посредством измерения высоты Солнца или звезды относительно горизонта. Качающийся корабль больше не вносил погрешность в измерения.
Если определение координат по широте с достаточным уровнем точности стало возможно с появлением секстанта, то определение координат по долготе представляло сложности еще некоторое время. Для позиционирования было необходимо определение временного отличия относительно референсной точки — например, времени по Нулевому меридиану или относительно времени в порту. Прорывом стало изобретение хронометра в 1760 году — его создал лондонский часовщик Джон Гаррисон.
С перечисленными инструментами определение местоположения стало более точным, но все еще недостаточным. Например, ошибка в 1 градус по долготе составляет 109 километров. И хотя неточности позиционирования нередко приводили к неожиданным географическим открытиям, для навигации подобные погрешности критичны.
Новейшая история определения местоположения объектов началась вместе с освоением космоса. Запуск первого искусственного спутника Земли в 1957 году стал отправной точкой, и дальнейшее развитие технологий привело человечество в мир, где не только собственное местоположение, но и позицию других объектов с точностью до нескольких метров можно определить, нажав одну кнопку на смартфоне. Какие технические решения позволяют достичь такого результата, расскажу далее.
Способы определения местоположения и их цели в наше время
Как и наши предки, мы хотим прокладывать маршруты — например, дойти до ветеринарной клиники или отделения МФЦ — и находить своих «соплеменников», например, уточнить, где конкретно припарковался друг. Но список целей и возможностей применения технологий позиционирования глобально расширился.
Помимо возможности строить и записывать маршруты пробежек или отслеживать путь курьера или такси, мы получили больше опций для обеспечения безопасности. Службы МЧС могут быстрее найти попавшего в беду человека, родители могут следить за передвижениями ребенка, противоугонные системы позволяют найти украденную машину.
В современном мире список объектов, положение которых мы можем и хотим отслеживать, кратно вырос: от ключей от дома, на которые мы вешаем GPS-трекер, до птиц, чей путь миграции исследуют ученые.

Шесть способов определения местоположения
Среди современных способов больше нет ни астролябий, ни секстантов. В наше время можно выделить следующие методы определения местоположения объекта:
системы спутниковой связи,
системы сотовой связи,
системы пеленгации,
системы видеонаблюдения,
RF-метки и чипы,
адрес (IP-адрес, почтовый адрес).
Далее мы подробно рассмотрим, как работают системы спутниковой и сотовой связи. По совокупности характеристик это наиболее эффективные, быстрые и точные системы для задач определения местоположения мобильных объектов.
Характеристики систем позиционирования
В числе основных характеристик, определяющих применимость системы позиционирования, можно перечислить:
точность определения местоположения,
скорость получения данных,
частота получения данных,
направленность передачи отчетов,
распространенность / универсальность оборудования и технологий,
стоимость внедрения и дооснащения оборудования.
Направленность передачи отчетов особенно важна в контексте использования данных спасательными службами. Информация о местоположении мобильного объекта должна быть доступна не только самому объекту, но и третьей стороне.
Спутниковые навигационные системы
Наиболее распространенные системы, которые с высокой точностью определяют местоположение объектов — от десятка до сотен метров. В зависимости от используемых алгоритмов точность может достигать десятка сантиметров.
Определение местоположения с использованием спутниковых систем
Метод основан на передаче навигационных данных от спутников к приемному устройству и расчете времени задержки прохождения сигнала между ними.

Итак, от спутника к мобильному устройству (приемнику) передается сигнал. Последний фиксирует задержку времени прохождения сигнала. По этому значению можно определить расстояние до спутника. Если известны координаты спутника и расстояние до него, можно начертить сферу, в области которой находится объект (А). Но для точного определения местоположения этого недостаточно.
Добавляем данные о расстоянии до второго спутника (B) — неопределенность сократится до окружности, но этих данных все еще недостаточно для точного позиционирования. Подключение третьего спутника (C) сокращает варианты местоположения объекта до двух точек.
В теории трех спутников достаточно для позиционирования: как правило, одна точка находится на поверхности Земли, а вторая — глубоко в недрах или космосе. На практике же существует набор факторов, которые вносят погрешность в определение координат: нестабильность работы генераторов на приемнике и спутниках, расхождение часов и др. Поэтому необходимо иметь по крайней мере четыре спутника в зоне видимости мобильного устройства, чтобы обеспечить приемлемую точность определения местоположения.
Источники погрешности и степень их влияния приведены в таблице ниже:

Если говорить о характеристиках радиосигналов, которые используются для передачи навигационных данных, каждая из международных команд, разрабатывающих спутниковые системы, применяют свои методы и технологии, чтобы достичь наилучшего покрытия и точности определения местонахождения в своем регионе.
Во время передачи радиосигнала от спутника к приемнику перед системой стоит несколько задач:
синхронизировать часы между всеми спутниками и приемным устройством,
сделать так, чтобы приемник мог выделить сигнал, точно определить разницу во времени и задержку передачи сигнала,
разделить сигналы, полученные от разных спутников.
Почти все существующие спутниковые системы используют одни и те же диапазоны частот. Отличие лишь в орбитах, на которых запускаются спутники, и в используемых алгоритмах вычислений.
Какие спутниковые системы существуют на текущий момент
Сейчас в мире четыре глобальных спутниковых системы:
Glonass (Глобальная навигационная спутниковая система) — российская спутниковая система навигации.
GPS (Global Positioning System — система глобального позиционирования) — американская спутниковая система навигации.
Galileo — совместный проект спутниковой системы навигации Европейского союза и Европейского космического агентства.
Beidou — китайская глобальная спутниковая система навигации.

Среди них можно отметить Beidou — быстро развивающуюся систему. Ее разработка началась в 1994 году, на полную мощность она вышла в 2020-ом. Самое большое количество спутников сейчас запущено именно для этой системы. И Beidou на данный момент обеспечивает самую большую точность по определению местоположения.
Региональные проекты
Есть локальные проекты спутниковых систем, которые нацелены на покрытие конкретного географического региона.
Японская система QZSS (Quasi-Zenith Satellite System). Ориентирована на Тихоокеанско-Азиатский регион. В рамках проекта запущены четыре космических аппарата, которые находятся на квазизенитных орбитах.

Индийская система NavIC. Охватывает территорию Индии, близлежащих стран и акваторию Индийского океана. Орбитальная группировка состоит из четырех космических аппаратов на геостационарной орбите и четырех — на геосинхронной. На данный момент индийская система обеспечивает полное покрытие данного региона, а точность определения местоположения объектов превышает характеристики GPS.

Вполне возможно, что успешные региональные проекты могут вырасти до полномасштабных глобальных систем.
Орбиты спутников
Большинство навигационных спутников расположены на средних околоземных орбитах — от 2000 км до 35786 км над уровнем моря. Последнее значение определяет расположение геосинхронной орбиты, на которой угловая скорость спутника равна угловой скорости обращения Земли — 23 часа 56 минут 4,1 секунды.
Частный случай геосинхронных орбит — это геостационарные орбиты, расположенные на экваторе. Спутники, запущенные на этих орбитах, отличаются тем, что их положение как бы «закреплено» относительно Земли в одной точке окружения. Спутниковая антенна, однажды направленная на такой спутник, не должна перестраиваться.
Спутники на геостационарных орбитах очень удобны и применяются в телекоммуникационных и навигационных целях. Но у них есть недостатки:
спутники не видны с южного и северного полюсов Земли,
сохранение геостационарной (как и геосинхронной) орбиты достаточно сложно. На спутники воздействуют притяжение Земли, Солнца, прочие явления — происходят отклонения от заданной орбиты. Эти отклонения учитывают станции наземного слежения, затем их передают на спутник от пункта управления вместе с данными альманахов — устройство обновляет информацию и корректирует погрешность.
Несмотря на точность систем спутниковой связи, у них есть несколько недостатков, которые могут быть скомпенсированы системами сотовой связи.
Системы сотовой связи и услуги LBS
Можно выделить несколько важных отличий систем сотовой связи от спутниковых систем:
Позиционирование с использованием систем сотовой связи возможно даже в помещениях, в то время как нужное количество спутников не всегда может быть в зоне видимости устройства, если оно находится в здании.
Системы сотовой связи позволяют не только определить местоположение объекта, но и передать эту информацию третьему лицу. Это важно в контексте поисковых и спасательных операций — по сигналу мобильного телефона можно найти потерявшегося ребенка, грибника или рыбака, спасти человека, который по каким-то причинам не может сообщить о своем местоположении.
Как модернизировались системы сотовой связи, чтобы предоставлять услуги LBS
LBS (Location-based service) — услуги, основанные на определении текущего местоположения мобильного телефона, которые начали развиваться еще в сетях 2G.
Для предоставления услуг LBS сети оснащаются специальными узлами SMLC (Serving Mobile Location Center), GMLС (Gateway Mobile Location Center), которые обеспечивают прием запросов от внешних пользователей и служб. Запросы на определение местоположения передаются к базовым станциям и абонентскому оборудованию. Затем указанные узлы получают данные измерений, по которым производится вычисление местоположения объекта.
Если измерения выполняются по направлению Uplink — от абонентского терминала к антенне (касается всех методов, которые мы рассмотрим далее), то базовые станции должны быть оборудованы модулями LMU (location measurement units), которые выполняют часть вычислений.
Комитеты, разрабатывающие спецификации для мобильной телефонии, ввели дополнительные параметры в протоколы информационного взаимодействия между узлами для поддержки услуг LBS. А на некоторых интерфейсах сетей сотовой связи разработаны специальные протоколы для передачи информации об измерениях, выполняемых абонентским устройством или базовой станцией. В этом тексте мы не будем подробно останавливаться на протоколах, а сосредоточимся на методах.
Методы позиционирования в услугах LBS
Методы определения местоположения, предоставляемые в сетях сотовой связи, можно разделить на четыре категории:
Network-based. Методы, при которых сеть сотовой связи самостоятельно вычисляет местоположение мобильного устройства.
Terminal-based. Мобильное устройство определяет свое местоположение и передает информацию к узлам сети сотовой связи.
Network-assisted. Финальный расчет позиций производит абонентский терминал. Вспомогательные данные для расчетов передаются из сети (SMLC) к терминалу.
Terminal-assisted. Финальный расчет позиций производит сеть (SMLC). Вспомогательные данные для расчетов (измерения референсных сигналов, предусмотренных в системах связи) передаются от терминала к сети.
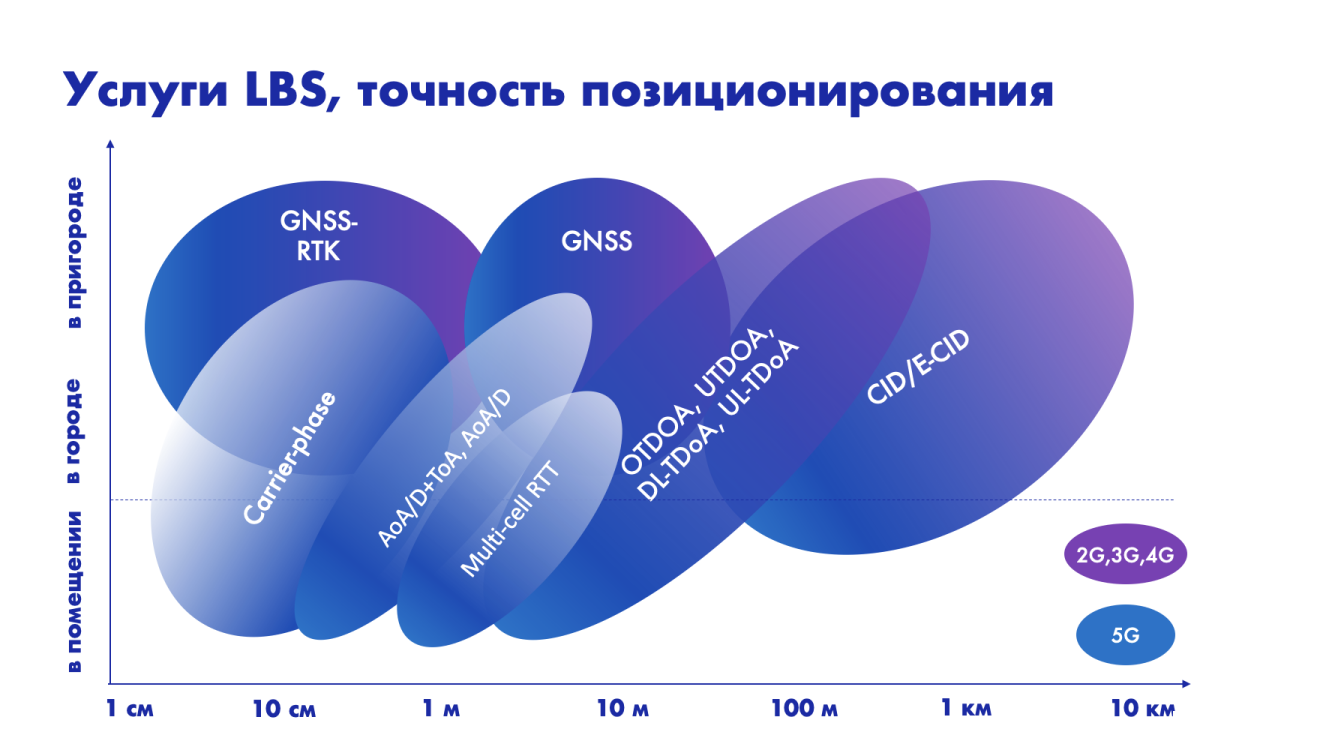
Некоторые методы, специфицированные для сетей 5G, обеспечивают точность, сопоставимую с характеристиками спутниковых систем связи. А точность определения местоположения объектов при методах, применяемых в сетях 2G, 3G ,4G, зависит от ряда факторов — например, где находится мобильное устройство: в помещении или на улице, в городе или пригороде. На разницу в показателях влияет плотность размещения базовых станций. Для некоторых методов точность позиционирования зависит от количества базовых станций, участвующих в измерениях, — например, это характерно для методов OTDOA, UTDOA, DL-TDoA и UL-TDoA.

CID — один из первых методов позиционирования, который применим к сетям любого поколения. Основывается на определении зоны обслуживания, в которой находится мобильное устройство. Местоположение устройства можно вычислить на основе координат базовой станции и данных о зоне ее обслуживания. Погрешность метода составляет от 1 до 10 км в зависимости от размера соты, то есть от места нахождения мобильного устройства — в городе или пригороде. В худшем случае погрешность может достигать 35 км в случае сетей 2G/GSM — используется зона обслуживания соты без определения мощности приема и timing advance.
С дальнейшим развитием технологий появился метод Enhanced CID (E-CID). Для повышения точности определения местоположения объекта стали учитывать время распространения сигнала — от мобильного устройства к базовой станции или наоборот. Методы, которые таким образом позволяют определять расстояние от передающей станции до мобильного устройства, называются Timing Advance (опережение по времени) и Round Trip Time (RTT, круговая задержка). Погрешность для первого метода составляет около 550 метров, а для RTT, применяемого в сетях UMTS, — около 75 метров.
Метод Multi-cell RTT

Этот метод, по сути, усовершенствованный вариант E-CID. В нем также используются данные о зоне обслуживания базовых станций и измерения Round Trip Time, только не от одной, а нескольких базовых станций — например, трех, как на иллюстрации выше.
Multi-cell RTT обеспечивает точность, сопоставимую с характеристиками систем спутниковой связи. Метод позволяет вычислять положение мобильного объекта с погрешностью от 1 до 10 метров.
Методы OTDOA, UTDOA, DL-TDoA и UL-TDoA

Эта группа методов основана на разнице времени прихода сигнала от разных базовых станций в направлении Uplink (от мобильного устройства к базовой станции) или Downlink (от станции к мобильному устройству). Мобильное устройство вычисляет разницу в прохождении сигнала между каждой парой базовых станций, и на основании этой разницы строятся гиперболические функции. Система гиперболических уравнений позволяет определить местоположения объекта с точностью до одного метра.

Методы AoA/D + ToA, AoA/D

Аббревиатура этого метода вычисления местоположения — AoA — расшифровывается как Angle of Arrival. Из названия можно понять, что в нем учитывается угол принятия сигнала от мобильного устройства к базовой станции или в обратном направлении.
Использование метода стало возможным в системах LTE и 5G, с появлением антенн MIMO, которые обеспечивают передачу сигналов лучами. Мобильное устройство может определить мощность приемного сигнала для каждого из лучей и вычислить угол, на котором находится антенна относительного его местоположения. Также известна высота подвеса антенны и то, какой луч обладает большей мощностью, — таким образом определяется еще один угол. Кроме этого, известен азимут расположения антенн относительно географических координат (север-юг-запад-восток). Эти три угла позволяют определить местоположение мобильного объекта с точностью до 10 см. Но стоит отметить, что для достижения такого результата необходима прямая видимость между мобильным устройством и приемо-передающей антенной.
Гибридные методы — сочетание спутниковой и мобильной систем связи
Сочетание методов двух систем дает наиболее точные данные о местоположении мобильных объектов.

Вспомним классификацию методов передачи данных в системе сотовой связи. В гибридной модели используются как раз terminal- и network-assisted методы. В данном случае информация, передаваемая от сетей связи к мобильным устройствам, — это данные об альманахе спутников.
При первом включении устройству необходимо несколько минут, чтобы получить навигационные данные от спутников. Значительное время расходуется на поиск спутников, находящихся в зоне видимости мобильного устройства, а также на получение альманаха. Чтобы его сократить, сеть сотовой связи, технологии которой позволяют определить местоположение объекта значительно быстрее, но с меньшей точностью, используют данные о позиции устройства и формируют запрос на получение альманаха для соответствующей точки у специального сервера (location server). Необходимые данные о спутниках передаются к мобильному устройству посредством сети сотовой связи в течение нескольких секунд после начала позиционирования. Далее мобильный телефон использует данные альманаха для более точного определения местоположения с использованием спутниковых систем.
Поскольку информация получена от location servers, в процесс можно добавить системы корректировки данных спутников. Так работает метод GNSS-RTK. Его суть заключается в приеме спутникового сигнала одновременно мобильным устройством в определяемой точке и референсной станцией, находящейся в известной точке. Станция наземного слежения, фиксирует разницу в вычислениях и фактических данных и передает поправки спутникам. Метод обеспечивает значительное увеличение точности определения местоположения объектов.
Также стоит упомянуть метод Carrier-phase, который позволяет корректировать ошибки, связанные с эффектом Доплера.
Если распределить методы определения местоположения объектов по эффективности, то в лидерах будут GNSS-RTK и Carrier-phase. С небольшим отставанием следует группа методов Angle of Arrival и Multi-cell RTT. Средние позиции занимают методы OTDOA, UTDOA, DL-TDoA и UL-TDoA, а самыми неточными являются метод CID и его усовершенствованная версия E-CID.
Какие требования выдвигают к точности определения местоположения современные сервисы
Современные сервисы требуют довольно высоких показателей точности определения местоположения мобильных объектов и низких значений задержки данных. Если говорить об автономных средствах передвижения — беспилотных автомобилях, роботах и др. — точность определения местоположения должна составлять до 30-50 см, а время задержки не должно превышать секунду. Это логично, ведь беспилотный транспорт должен непрерывно получать данные об окружающей среде — других мобильных объектах, данных карт и т.д. — и своем местоположении.

С переходом на сети 5G и использованием методов, которые предоставляют эти технологии, большинство услуг по определению местоположения получат сильный толчок в развитии. Также, безусловно, на качество предоставляемого сервиса повлияет увеличение числа базовых станций в городах и пригородах.
В нашей стране инженеры в сфере телекоммуникаций сосредоточены на создании отечественного оборудования для сетей LTE. Развитие и развертывание 5G-сетей пока откладывается до конца 20-х годов. Тем не менее, с появлением оборудования данного стандарта будут развиваться и услуги LBS, поскольку это одно из приоритетных направлений применения ресурсов, предоставляемых сетями 5G.
В YADRO мы создаем телекоммуникационное оборудование для беспроводных мобильных сетей и сопутствующих услуг. Если вам интересны такие задачи, вы можете стать частью команды. Сейчас активно ищем таких специалистов:
→ Техлид команды разработчиков на C++ в 5G Core
→ Техлид команды C/C++ для GSM
Ранее на Хабре мы развенчивали мифы работы в телекоме.
Увеличение точности определения местоположения с использованием систем спутниковой связи, в свою очередь, зависит от увеличения числа спутников, выведенных на орбиты, и улучшения алгоритмов передачи и приема данных. Утвержденная программа развития ГЛОНАСС до 2030 года предусматривает создание и выведение на орбиту еще тринадцати навигационных космических аппаратов «Глонасс-К2» (спутников второго поколения). 7 августа 2023 года с космодрома Плесецк на орбиту был успешно выведен первый такой навигационный спутник.
Настоящее и будущее телекоммуникаций также связано с освоением низких орбит (порядка 700-2000 км) и запускаемых на них проектах LEO (Low Earth Orbit). К перспективным коммерческим решениям можно отнести небезызвестные проекты SpaceX и OneWeb. При таком размещении спутники могут обеспечивать большую пропускную способность — до 10 Гбит/с. Также ввиду развития технологий у подобных спутников есть следующие преимущества:
их проще производить в связи с возможностью выпуска партий однотипных спутников,
более экономичный запуск — разработаны ракетоносители, ступени и двигатели которых могут использоваться повторно,
благодаря нахождению на наклонных орбитах спутники охватывают всю поверхность земного шара без ограничений.
Группировки LEO-спутников — это интересная тема, которой можно посвятить отдельный текст. Пишите в комментариях, если хотите узнать о ней больше. Вместе проследим историю развития и узнаем, смогут ли LEO-спутники составить серьезную конкуренцию GEO-системам.

{kind=link}