Как-то раз посмотрел я видео о поющих флопах и на гору списанных компов. Решил сделать что-то подобное.

Делать на Arduino как остальные? Да вы что, серьёзно? F*ck the system, как говорится! Решено было делать на Atmega8A, потому что только она и была под рукой. Провода тоже для слабаков, поэтому я отыскал HC-05 (зачем лишние сопли?).
Поехали!
Первый этап, как обычно, схема. С ней проблем нет.
Она простая и без лишних наворотов.
Плата тоже делается без особого напряжения при помощи фоторезиста. Раскидал за 10 минут и изготовил за час.
Теперь самое интересное — программирование. Писать решил на C, дабы сэкономить время. Но не успел начать, как уже грабли.
Грабли заключаются в управлении флопами. Как известно, если Direct pin = 0, а на Step давать импульсы, то флоп шагает вперёд, а если Direct pin = 1, то назад, но у флопа всего 80 шагов. Мало, что делать? Решение простое. Флоп умеет делать полшага, если просто менять состояние Step, а не пульсировать его. Делать это лучше так:
Первая проблема решена! Дальше реализация всей функции управления.
Сделали! Теперь таймеры. Таймер ставим в CTC mode с делением на 8 и разрешаем прерывание по Output Compare (далее OC). В OCR кладём 40. Примерно раз в 40 мкс наступает событие OC. Обработчик прерываний довольно ёмкий.
Теперь связь с компом. Здесь поступим так. Передаётся строка с макросом в заголовке (C/F) ->тело (число)->окончание пакета (';'). Во-первых, обработка через машину состояний:
Во-вторых, приём только в состоянии Idle:
— Ну, всё уже?
— Нет! А чем управлять?
Программу управления писать с нуля было влом, поэтому я добавил функционал в свою программу управления катушкой Теслы (HETC control terminal). Наркомания? Конечно. С её интерфейсом можно разобраться самому, писать много не буду. Единственное, что надо в начале выбрать Floppy и COM-порт устройства, далее Connect.
Да, можно и без блюпупа, это просто моя заморочка.
Выбираем миди-файл иии…
Исходники + прошивка.
Делать на Arduino как остальные? Да вы что, серьёзно? F*ck the system, как говорится! Решено было делать на Atmega8A, потому что только она и была под рукой. Провода тоже для слабаков, поэтому я отыскал HC-05 (зачем лишние сопли?).
Поехали!
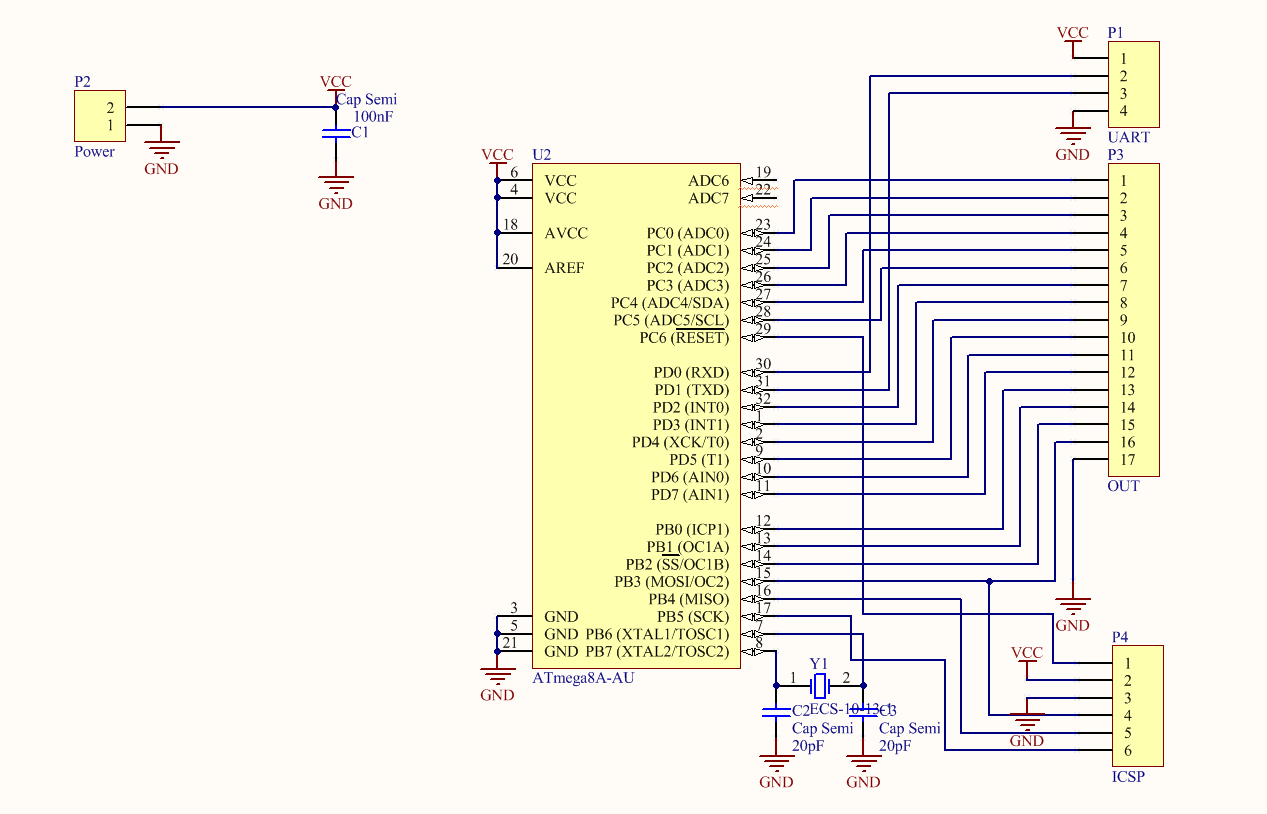
Схема
Первый этап, как обычно, схема. С ней проблем нет.
Она простая и без лишних наворотов.
Плата
Плата тоже делается без особого напряжения при помощи фоторезиста. Раскидал за 10 минут и изготовил за час.
Разводка платы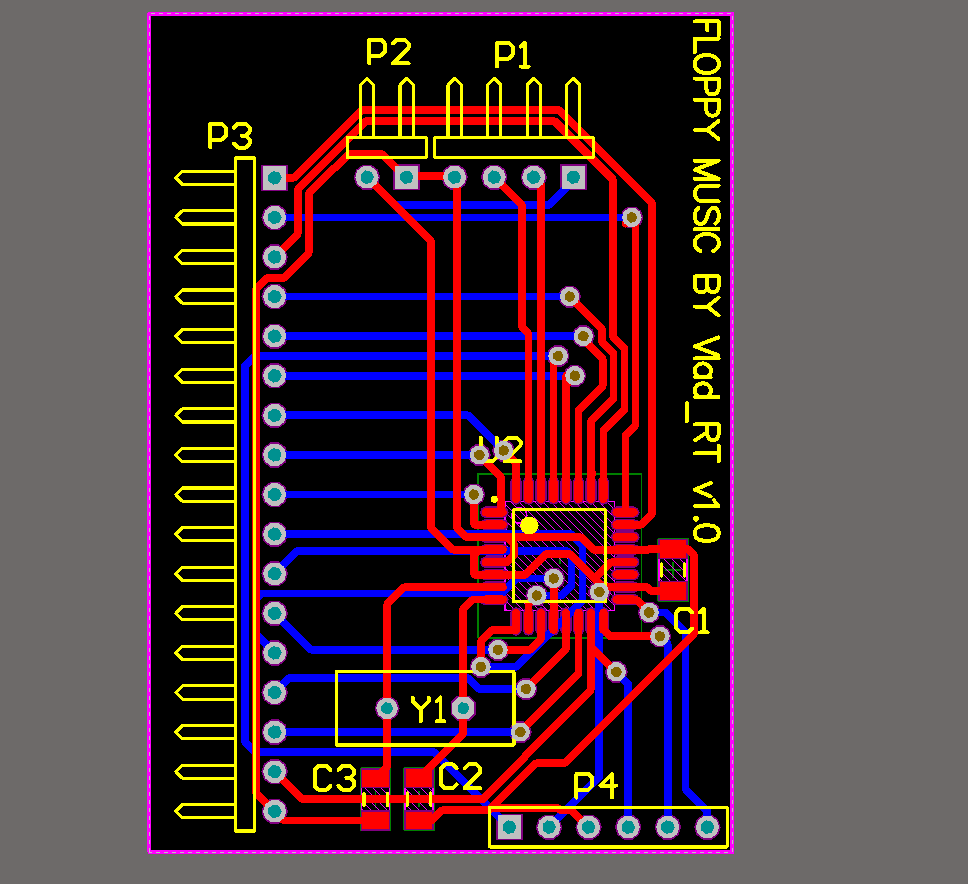

Пишем код
Теперь самое интересное — программирование. Писать решил на C, дабы сэкономить время. Но не успел начать, как уже грабли.
Грабли заключаются в управлении флопами. Как известно, если Direct pin = 0, а на Step давать импульсы, то флоп шагает вперёд, а если Direct pin = 1, то назад, но у флопа всего 80 шагов. Мало, что делать? Решение простое. Флоп умеет делать полшага, если просто менять состояние Step, а не пульсировать его. Делать это лучше так:
Step ^= (1<<pin);
Первая проблема решена! Дальше реализация всей функции управления.
void output(int drive){ // drive - номер флопа 1 - 8 int position = drive - 1; //пересчёт на позицию в массивах и байтах 0-7 if(currentPosition[position] >= max)direct |= 1 << position; // direct - переменная char (8 бит). Ставим нужный бит, если в крае if(currentPosition[position] <= 0)direct &= ~(1<<position); //обнуляем его, если мы в нуле if(direct & (1<<position)){ //проверка состояния back(drive); //шагаем назад currentPosition[position]--; //уменьшаем позицию текущего флоппи }else{ forward(drive); //шагаем вперёд currentPosition[position]++; //увеличиваем её } }
Сделали! Теперь таймеры. Таймер ставим в CTC mode с делением на 8 и разрешаем прерывание по Output Compare (далее OC). В OCR кладём 40. Примерно раз в 40 мкс наступает событие OC. Обработчик прерываний довольно ёмкий.
Для любознательных
void Action(){ if(fr1 != 0){ currentTick[0]++; //считаем тики таймера if(currentTick[0] >= fr1){ //fr* - периоды каналов в мкс output(1); currentTick[0]=0; //добежали - обнуляем } }; if(fr2 != 0){ currentTick[1]++; if(currentTick[1] >= fr2){ currentTick[1]=0; output(2); } }; if(fr3 != 0){ currentTick[2]++; if(currentTick[2] >= fr3){ output(3); currentTick[2]=0; } }; if(fr4 != 0){ currentTick[3]++; if(currentTick[3] >= fr4){ currentTick[3]=0; output(4); } }; if(fr5 != 0){ currentTick[4]++; if(currentTick[4] >= fr5){ currentTick[4]=0; output(5); } }; if(fr6 != 0){ currentTick[5]++; if(currentTick[5] >= fr6){ currentTick[5]=0; output(6); } }; if(fr7 != 0){ currentTick[6]++; if(currentTick[6] >= fr7){ currentTick[6]=0; output(7); } }; if(fr8 != 0){ currentTick[7]++; if(currentTick[7] >= fr8){ currentTick[7]=0; output(8); } }; } ISR(TIMER2_COMP_vect){ Action(); }
Теперь связь с компом. Здесь поступим так. Передаётся строка с макросом в заголовке (C/F) ->тело (число)->окончание пакета (';'). Во-первых, обработка через машину состояний:
void parse(){ char data = UDR; switch(data){ case 'C': tmp_int = 0; SM= data; break; // С - Это макрос канала case 'F': tmp_int = 0; SM= data; break; // F - частоты case '0': case '1': case '2': case '3': case '4': case '5': case '6': case '7': case '8': case '9': tmp_int = tmp_int * 10 + (data -'0'); break; case ';': switch(SM){ case 'C': channel=tmp_int; break; case 'F': freq = tmp_int; break; }; play(freq, channel); break; //в play пересчитывается период с учётом тактовой частоты и записывается в fr* case 'R' : resetAll(); break; default: break; } }
Во-вторых, приём только в состоянии Idle:
while ( UCSRA & (1<<RXC))parse();
— Ну, всё уже?
— Нет! А чем управлять?
Программу управления писать с нуля было влом, поэтому я добавил функционал в свою программу управления катушкой Теслы (HETC control terminal). Наркомания? Конечно. С её интерфейсом можно разобраться самому, писать много не буду. Единственное, что надо в начале выбрать Floppy и COM-порт устройства, далее Connect.
Да, можно и без блюпупа, это просто моя заморочка.
Выбираем миди-файл иии…
Исходники
Исходники + прошивка.

