
«Дайте мне точку опоры, и я переверну Землю» — так, по легенде, сказал Архимед, научно объяснив интуитивно понимаемый принцип работы рычага. Но в космическом вакууме опоры нет. А спутникам нужно, чтобы солнечные батареи смотрели на Солнце, антенны — на Землю, камера — на интересный участок Марса, а двигатель для коррекции орбиты — строго в определенную точку пространства. Приходится что-то придумывать, чтобы опереться на пустоту.
Двигатели ориентации
Самый очевидный вариант — поставить специальные небольшие двигатели, которые будут управлять ориентацией аппарата:

Двигатели ориентации лунного модуля
Двигатели можно сделать мощными, чтобы поворачивать тяжелые аппараты или крутиться быстрее, или очень слабыми, чтобы поворачиваться очень точно. Они сравнительно мало весят и не требуют электроэнергии, когда не работают. Все бы хорошо, но для того, чтобы поворачиваться, нужно тратить топливо, а его всегда ограниченное количество. Да и у самих двигателей есть ограничения по количеству запусков и общему времени работы.
Двигатели ориентации можно также использовать для орбитальных маневров, особенно если планируется стыковка. Маршевый двигатель может толкать аппарат только в одну сторону, а с помощью двигателей ориентации можно смещаться по всем осям.
Достоинства:
- Простота.
- Обеспечивают ориентацию по всем трем осям.
- Сравнительно небольшая масса.
- Гибкость: можно сделать мощные или очень точные двигатели.
- Могут использоваться для маневрирования на орбите.
- Могут долго находиться в выключенном состоянии.
Недостатки:
- Расход топлива.
- Ограничение по количеству запусков и общему времени работы.
- Загрязнение окрестностей аппарата сгоревшим топливом (может быть актуально для телескопов).
Двигатели ориентации используются обычно там, где требуется активное, сравнительно редкое или короткое по времени изменение ориентации аппарата. Поэтому они стоят на всех пилотируемых аппаратах, и обычно предпочтительны для межпланетных станций, которые месяцами и годами летят в спящем режиме, сохраняя построенную ориентацию.

Двигатели причаливания и ориентации корабля «Союз» на МАКС-2005. Красное — защитные крышки, которые снимаются перед полетом
Работа ДПО корабля «Союз» во время стыковки с МКС в ускоренном воспроизведении
Стабилизация вращением
Всем нам с детства известна способность волчка сохранять вертикальное положение. Если раскрутить космический аппарат, он будет вести себя совершенно также, сохраняя стабилизацию по оси вращения.

Если нас устраивает стабилизация по одной оси, мы не собираемся поворачивать аппарат в разные стороны и делать фотографии с длинной выдержкой, этот способ может оказаться очень экономным.
Достоинства:
- Простота.
- Экономичность — раскручиваемся один раз и крутимся хоть столетиями.
Недостатки:
- Стабилизация только по одной оси.
- Нельзя поворачивать аппарат.
- Вращение может мешать работе оборудования.
Исторически, стабилизацию вращением очень полюбили американцы. Все зонды программы «Пионер» стабилизировались вращением. На первых аппаратах это делалось из-за низкой грузоподъемности ракет — стабилизировать шестикилограммовый «Пионер-4» другими способами на технологиях 1959 года было невозможно. Стабилизация вращением «Пионеров» -10 и -11 выглядит отличным решением — если движение Земли по орбите укладывается в диаграмму направленности антенны, зонд постоянно «на связи», не тратя на это ни грамма топлива и не боясь отказа системы ориентации. Два зонда «Пионер-Венера» стабилизировали вращением, наверное, уже по привычке — на одном из них антенна механически вращалась, чтобы нацеливаться на Землю, что выглядит уже не очень рационально.
Кроме межпланетных станций, американцы широко использовали закрутку разгонных блоков. В этом случае твердотопливные разгонные блоки не нуждались в отдельной системе ориентации.
Запуск спутника с разгонным блоком PAM-D с борта Спейс Шаттла
После разгона можно было достаточно просто затормозить вращение, используя закон сохранения момента импульса (пример в невесомости, пример на котиках) — небольшие грузы разматывались на тросиках и замедляли вращение аппарата.
Маховик (Reaction wheel)
Так же как кошка, которая в падении закручивает хвост в противоположную перевороту туловища сторону, космический аппарат может управлять ориентацией с помощью маховика. Например, если мы хотим повернуть аппарат по часовой стрелке:
- Начальное состояние: аппарат неподвижен, маховик неподвижен.
- Раскручиваем маховик против часовой стрелки, аппарат начинает поворачиваться по часовой стрелке.
- Когда повернулись на нужный угол: останавливаем вращение маховика, аппарат останавливается.
Если маховик уже вращается, то, меняя его скорость, мы можем создавать силу, которая поворачивает аппарат. Вот на этом видео можно по высоте тона вращения маховика определить, что понижение скорости вращения (более низкий звук) создает силу, поворачивающую платформу по часовой стрелке, повышение скорости (более высокий звук) — против:
Использование маховиков позволяет поворачиваться с высокой точностью и не тратить драгоценное топливо. Но, как и любая другая техническая система, маховики имеют свои недостатки. Прежде всего, один маховик может поворачивать аппарат только по одной оси. Чтобы полностью управлять ориентацией аппарата нужно три маховика. А учитывая необходимость резервирования, шесть или больше. Также, скорость поворота прямо пропорциональна массе маховика и скорости его вращения и обратно пропорциональна массе аппарата. Говоря простым языком, чем больше масса аппарата, тем тяжелее должны быть маховики. Также, любой маховик имеет предельную скорость вращения и может разорваться, если его раскрутить сильнее. А если возмущающая сила действует на аппарат в одном направлении, то маховик со временем дойдет до предельной скорости, и нужно будет его разгружать какой-нибудь другой системой. Ну и, наконец, как и любая механика, маховик со временем изнашивается и может выйти из строя.
Достоинства:
- Не требует расхода топлива.
- Позволяет очень точно нацеливать аппарат.
Недостатки:
- Малопригодны для активного маневрирования, вращение сравнительно медленное.
- Требуется еще одна система ориентации для разгрузки маховиков.
- Со временем изнашиваются и выходят из строя.
- На каждую ось нужен минимум один маховик.
Маховики очень выгодны, если нам часто приходится перенацеливать аппарат, не меняя его орбиты. Поэтому маховики стоят на орбитальных телескопах. Например, на «Хаббле» стоят четыре маховика, обеспечивая резервированное управление по двум осям. У «Хаббла» нет задачи вращаться вокруг своей оси, поэтому маховики используются для поворота телескопа «вверх/вниз» и «вправо/влево».

Один из маховиков телескопа «Хаббл»
Гиродин (Control moment gyroscope)
Свойство волчка сохранять вертикальное положение можно использовать еще одним способом — на него можно опереться:
Если поместить такой волчок в подвесную систему, то можно, «опираясь» на него, поворачиваться в нужную сторону. Такие конструкции называются силовыми гироскопами или гиродинами. Главное отличие гиродина от маховика — в том, что маховик жестко установлен на одной оси и управляет ориентацией, изменяя скорость своего вращения. Гиродин же установлен в подвесе, который может вращаться в одной или нескольких плоскостях, и может не менять скорость своего вращения. В этом видео наглядно видно движение подвеса, при том, что высота тона вращения гиродина не меняется.
С точки зрения функциональности, гиродин — это «продвинутый» маховик. Гиродины эффективнее обычных маховиков, но и сложнее. Они могут управлять ориентацией гораздо более тяжелых аппаратов, но разделяют достоинства и недостатки маховиков. В этом видео показано, что гиродины, как и маховики, нуждаются в разгрузке — когда ось подвеса не может больше поворачиваться, велосипед начинает падать:
Достоинства:
- Такие же, как у маховика.
- Эффективнее, чем маховик — гиродин той же массы может управлять ориентацией гораздо более тяжелого аппарата.
Недостатки:
- Такие же, как у маховика.
- Сложнее маховика.
Гиродины, благодаря своей эффективности, используются на орбитальных станциях. Например, на МКС стоят четыре гиродина по 300 кг каждый.

Замена гиродина на МКС
Электромагнитная система ориентации
Магнитное поле Земли способно поворачивать стрелку компаса, значит, эту силу можно использовать для того, чтобы управлять ориентацией космического аппарата. Если поставить на спутник постоянные магниты, то действующая сила будет неуправляемой. А если поставить катушки-соленоиды, то, подавая на них ток, можно создавать нужный управляющий момент:
Три соленоида, установленных в перпендикулярных плоскостях, позволяют управлять ориентацией спутника по всем трем осям. Точнее, они обеспечивают хорошее управление по двум осям, стремясь установить аппарат как стрелку компаса. Управление по третьей оси обеспечивается изменением направления магнитного поля Земли при полете аппарата по орбите.

Электромагнитная ориентация не может быть точной из-за случайных колебаний магнитного поля Земли, и ее эффективность падает с высотой. Да и в целом, силы, создаваемые соленоидами, невелики. Также их использование ограничено небесными телами с достаточно сильным магнитным полем, например, на орбите Марса, они практически бесполезны. Зато соленоиды не содержат движущихся частей, не тратят топливо и энергетически эффективны.
Достоинства:
- Простота.
- Не требуют топлива.
- Небольшая масса.
- Не содержат движущихся частей и практически не изнашиваются.
Недостатки:
- Небольшие управляющие силы.
- Невысокая точность.
- Требуется магнитное поле у небесного тела, вокруг которого обращается аппарат.
- Эффективность зависит от высоты.
Электромагнитная ориентация используется как основная на кубсатах и прочих небольших аппаратах. Также ее часто используют для разгрузки маховиков или гиродинов. Например, телескоп «Хаббл» использует в качестве основной системы ориентации маховики, а разгружает их электромагнитной системой.

Пример соленоида для космических аппаратов. Сайт производителя утверждает, что уже больше 80 соленоидов стоят на различных спутниках
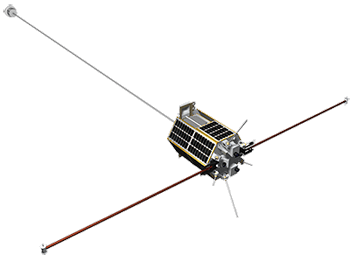
Гравитационная стабилизация
Притяжение двух тел обратно пропорционально квадрату расстояния между ними. Поэтому, если наш спутник выдвинет длинный шест с грузом, то получившаяся «гантель» будет стремиться занять вертикальное положение, когда ее нижняя часть будет притягиваться к Земле чуть сильнее, чем верхняя. Вот компьютерное моделирование 1963 года (!), показывающее этот эффект:
В первой части видео спутник занимает устойчивое положение по оси к Земле. В реальности случайные возмущения будут нарушать идеальное равновесие, и спутник будет колебаться вокруг оси, поэтому обычно такие системы дополняют демпфером. Небольшая емкость с жидкостью будет превращать энергию колебаний в тепловую и «успокаивать» спутник.
Достоинства:
- Очень простая система.
- Ориентация строится пассивно, без системы управления.
Недостатки:
- Ориентация строится медленно из-за слабости сил, действующих на тело.
- Низкая точность.
- Только один тип ориентации — осью к центру Земли.
- Эффект падает с высотой.
- Спутник может перевернуться «вверх тормашками» относительно нужной ориентации.
Гравитационная система ориентации используется в основном на небольших аппаратах, не требующих точной стабилизации. Она хорошо подходит для некоторых типов кубсатов, также, ей, например, был оснащен спутник «Юбилейный»:
Аэродинамическая стабилизация
Следы земной атмосферы заметны и выше ста километров, а большая скорость спутников означает, что они будут сильнее тормозиться. Обычно эта сила очень мешает, потому что спутники достаточно быстро тормозятся, спускаются еще ниже и сгорают в плотных слоях атмосферы. Но, тем не менее, это сила, которая действует всегда против вектора орбитальной скорости, и ее можно использовать. Первые эксперименты были проведены еще в 60-х. Вот, например, отечественный аппарат «Космос-149», запущенный в 1967 году:

Низкая орбита, где аэродинамические силы максимальны, негостеприимное место. Но иногда там необходимо находиться для большей точности измерений. Очень красивое решение было использовано в спутнике GOCE, который изучал гравитационное поле Земли. Низкая орбита (~260 км) сделала эффективной систему аэродинамической стабилизации, а, чтобы спутник не сгорел слишком быстро, он постоянно ускорялся небольшим ионным двигателем. Получившийся аппарат мало похож на привычные спутники, кто-то даже назвал его «спутниковым Феррари»:

Благодаря ионному двигателю GOCE смог проработать с 2009 по 2013 годы, составив самую подробную гравитационную карту Земли.
Достоинства:
- Аэродинамическая сила бесплатна и не требует специальной системы управления.
Недостатки:
- Надо что-то делать, чтобы спутник не сгорел быстро в плотных слоях атмосферы.
- Сила зависит от высоты.
- Возможна ориентация только по одной оси.
Солнечный парус
Для построения ориентации можно еще использовать давление солнечного света. Солнечный парус обычно рассматривается как способ движения, но на спутник сложной формы с антеннами и солнечными батареями Солнце тоже будет действовать. Это может рассматриваться как помеха для других систем ориентации, либо, если разработчики рассчитали моменты сил заранее, это можно использовать для помощи построения ориентации спутника. Уже в 1973 году зонд Маринер-10, отправившийся к Венере и Меркурию, использовал солнечное давление для построения ориентации аппарата. Вдохновляет находчивость Лаборатории атмосферной и космической физики — когда на телескопе «Кеплер» отказали два из четырех маховиков, лаборатория разработала способ построения ориентации при помощи двух оставшихся маховиков и солнечного давления, чтобы телескоп последовательно рассматривал четыре участка пространства в год:

Очень интересным был отечественный проект Регата-Плазма, разрабатывавшийся в 90-х годах. С помощью солнечного паруса-стабилизатора и поворачивающихся рулей аппарат занимал положение в направлении Солнца и при необходимости мог быть закручен:

Даже сейчас подобная система была бы уникальной и очень интересной, жаль, что проект был закрыт.
Достоинства:
- Совершенно бесплатное солнечное давление.
Недостатки:
- Нельзя построить произвольную ориентацию по трем осям.
- Не работает в тени, что важно, например, для низкой земной орбиты.
Заключение
Для сил, которые зависят от высоты полета, есть примерный график:

Еще одно видео с котиками и реальными гиродинами NASA.
Более сложное видео по той же теме — «Проектирование системы ориентации и стабилизации» от сообщества «Твой сектор космоса».
По тегу «Незаметные сложности» публикации о двигателях, топливе, баках, стартовых сооружениях и тому подобных интересных, но не очень заметных из-за своей привычности вещах.


{kind=link}