
Метод покоординатного спуска является одним из простейших методов многомерной оптимизации и неплохо справляется с поиском локального минимума функций с относительно гладким рельефом, поэтому знакомство с методами оптимизации лучше начинать именно с него.
Поиск экстремума ведется в направлении осей координат, т.е. в процессе поиска изменяется только одна координата. Таким образом, многомерная задача сводится к одномерной.
Алгоритм
Первый цикл:
 ,
,  ,
,  , ...,
, ...,  .
.- Ищем экстремум функции
 . Положим, экстремум функции в точке
. Положим, экстремум функции в точке  .
.  ,
,  , , ..., . Экстремум функции
, , ..., . Экстремум функции  равен
равен 
- ...
- ,
 ,
,  , ...,
, ...,  .
.
В результате выполнения n шагов найдена новая точка приближения к экстремуму . Далее проверяем критерий окончания счета: если он выполнен – решение найдено, в противном случае выполняем еще один цикл.
. Далее проверяем критерий окончания счета: если он выполнен – решение найдено, в противном случае выполняем еще один цикл.
Подготовка
Сверим версии пакетов:
(v1.1) pkg> status Status `C:\Users\User\.julia\environments\v1.1\Project.toml` [336ed68f] CSV v0.4.3 [a93c6f00] DataFrames v0.17.1 [7073ff75] IJulia v1.16.0 [47be7bcc] ORCA v0.2.1 [58dd65bb] Plotly v0.2.0 [f0f68f2c] PlotlyJS v0.12.3 [91a5bcdd] Plots v0.23.0 [ce6b1742] RDatasets v0.6.1 [90137ffa] StaticArrays v0.10.2 [8bb1440f] DelimitedFiles [10745b16] Statistics
Зададим функцию для отрисовки поверхности либо линий уровня, в которой было бы удобно регулировать границы графика:
using Plots plotly() # интерактивные графики function plotter(plot_fun; low, up) Xs = range(low[1], stop = up[1], length = 80) Ys = range(low[2], stop = up[2], length = 80) Zs = [ fun([x y]) for x in Xs, y in Ys ]; plot_fun(Xs, Ys, Zs) xaxis!( (low[1], up[1]), low[1]:(up[1]-low[1])/5:up[1] ) # линовка осей yaxis!( (low[2], up[2]), low[2]:(up[2]-low[2])/5:up[2] ) end
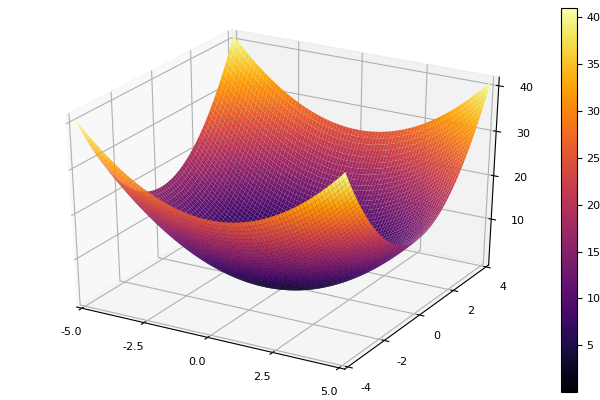
В качестве модельной функции выберем эллиптический параболоид
parabol(x) = sum(u->u*u, x) fun = parabol plotter(surface, low = [-1 -1], up = [1 1])
Покоординатный спуск
Метод реализуем в функции принимающей название метода одномерной оптимизации, размерность задачи, желаемую погрешность, начальное приближение, и ограничения для отрисовки линий уровня. Всем параметрам зададим значения по-умолчанию.
function ofDescent(odm; ndimes = 2, ε = 1e-4, fit = [.5 .5], low = [-1 -1], up = [1 1]) k = 1 # счетчик для ограничения количества шагов sumx = 0 sumz = 1 plotter(contour, low = low, up = up) # рисуем контуры рельефа x = [ fit[1] ] # массив из одного элемента y = [ fit[2] ] # в них можно пушить координаты while abs(sumz - sumx) > ε && k<80 fitz = copy(fit) for i = 1:ndimes odm(i, fit, ε) # отрабатывает одномерная оптимизация end push!(x, fit[1]) push!(y, fit[2]) sumx = sum(abs, fit ) sumz = sum(abs, fitz) #println("$k $fit") k += 1 end # кружочками отрисовать маршрут спуска scatter!(x', y', legend = false, marker=(10, 0.5, :orange) );# размер, непрозрачность, цвет p = title!("Age = $(size(x,1)) f(x,y) = $(fun(fit))") end
Далее опробуем различные методы одномерной оптимизации
Метод Ньютона

Идея метода проста как и реализация
# производная dfun = (x, i) -> i == 1 ? 2x[1] + x[2]*x[2] : 2x[2] + x[1]*x[1] function newton2(i, fit, ϵ) k = 1 oldfit = Inf while ( abs(fit[i] - oldfit) > ϵ && k<50 ) oldfit = fit[i] tryfit = fun(fit) / dfun(fit, i) fit[i] -= tryfit println(" $k $fit") k+=1 end end ofDescent(newton2, fit = [9.1 9.1], low = [-4 -4], up = [13 13])

Ньютон довольно требователен к начальному приближению, а без ограничения по шагам вполне может ускакать в неведанные дали. Расчет производной желателен, но можно обойтись и малым варьированием. Модифицируем нашу функцию:
function newton(i, fit, ϵ) k = 1 oldfit = Inf x = [] y = [] push!(x, fit[1]) push!(y, fit[2]) while ( abs(oldfit - fit[i]) > ϵ && k<50 ) fx = fun(fit) oldfit = fit[i] fit[i] += 0.01 dfx = fun(fit) fit[i] -= 0.01 tryfit = fx*0.01 / (dfx-fx) # обрубаем при заскоке значения функции на порядок if( abs(tryfit) > abs(fit[i])*10 ) push!(x, fit[1]) push!(y, fit[2]) break end fit[i] -= tryfit #println(" $k $fit") push!(x, fit[1]) push!(y, fit[2]) k+=1 end # траекторию Одном-й оптим-ии рисуем квадратиками plot!(x, y, w = 3, legend = false, marker = :rect ) end ofDescent(newton, fit = [9.1 9.1], low = [-4 -4], up = [13 13])

Обратная параболическая интерполяция
Метод не требующий знания производной и имеющий неплохую сходимость
function ipi(i, fit, ϵ) # inverse parabolic interpolation n = 0 xn2 = copy(fit) xn1 = copy(fit) xn = copy(fit) xnp = zeros( length(fit) ) xy = copy(fit) xn2[i] = fit[i] - 0.15 xn[i] = fit[i] + 0.15 fn2 = fun(xn2) fn1 = fun(xn1) while abs(xn[i] - xn1[i]) > ϵ && n<80 fn = fun(xn) a = fn1*fn / ( (fn2-fn1)*(fn2-fn ) ) b = fn2*fn / ( (fn1-fn2)*(fn1-fn ) ) c = fn2*fn1 / ( (fn -fn2)*(fn -fn1) ) xnp[i] = a*xn2[i] + b*xn1[i] + c*xn[i] xn2[i] = xn1[i] xn1[i] = xn[i] xn[i] = xnp[i] fn2 = fn1 fn1 = fn n += 1 println(" $n $xn $xn1") xy = [xy; xn] end fit[i] = xnp[i] plot!(xy[:,1], xy[:,2], w = 3, legend = false, marker = :rect ) end ofDescent(ipi, fit = [0.1 0.1], low = [-.1 -.1], up = [.4 .4])
Если взять начальное приближение похуже, метод начнет требовать немеренное количество шагов на каждую эпоху покоординатного спуска. В этом плане у него выигрывает братец
Последовательная параболическая интерполяция
Тоже требует три начальных точки, но на многих тестовых функциях показывает более удовлетворительные результаты
function spi(i, fit, ϵ) # sequential parabolic interpolation n = 0 xn2 = copy(fit) xn1 = copy(fit) xn = copy(fit) xnp = zeros( length(fit) ) xy = copy(fit) xn2[i] = fit[i] - 0.01 xn[i] = fit[i] + 0.01 fn2 = fun(xn2) fn1 = fun(xn1) while abs(xn[i] - xn1[i]) > ϵ && n<200 fn = fun(xn) v0 = xn1[i] - xn2[i] v1 = xn[i] - xn2[i] v2 = xn[i] - xn1[i] s0 = xn1[i]*xn1[i] - xn2[i]*xn2[i] s1 = xn[i] *xn[i] - xn2[i]*xn2[i] s2 = xn[i] *xn[i] - xn1[i]*xn1[i] xnp[i] = 0.5(fn2*s2 - fn1*s1 + fn*s0) / (fn2*v2 - fn1*v1 + fn*v0) xn2[i] = xn1[i] xn1[i] = xn[i] xn[i] = xnp[i] fn2 = fn1 fn1 = fn n += 1 println(" $n $xn $xn1") xy = [xy; xn] end fit[i] = xnp[i] plot!(xy[:,1], xy[:,2], w = 3, legend = false, marker = :rect ) end ofDescent(spi, fit = [16.1 16.1], low = [-.1 -.1], up = [.4 .4])
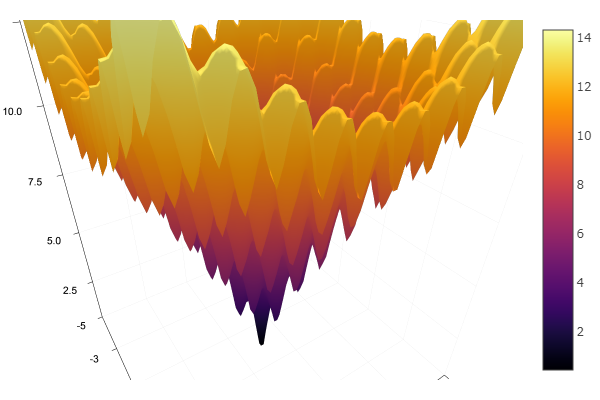
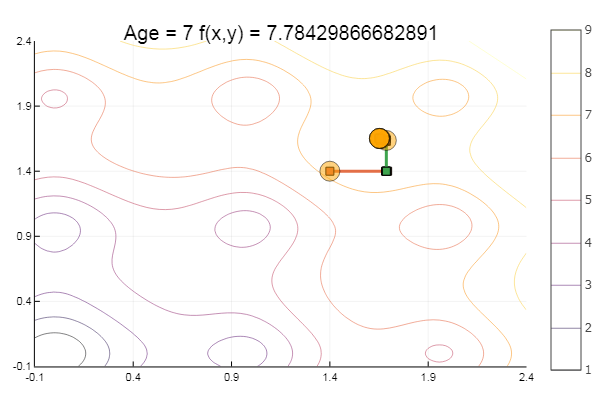
Выйдя из весьма дрянной стартовой точки дошло за три шага! Хорош… Но у всех методов есть недостаток — они сходятся к локальному минимуму. Возьмём теперь для исследований функцию Экли
![$f(x,y)=-20\exp \left[-0.2{\sqrt {0.5\left(x^{2}+y^{2}\right)}}\right]-\exp \left[0.5\left(\cos 2\pi x+\cos 2\pi y\right)\right]+e+20$](https://habrastorage.org/getpro/habr/formulas/bab/61d/2fd/bab61d2fdc458bc342822b6f5bf5ea8d.svg)
ekly(x) = -20exp(-0.2sqrt(0.5(x[1]*x[1]+x[2]*x[2]))) - exp(0.5(cospi(2x[1])+cospi(2x[2]))) + 20 + ℯ # f(0,0) = 0, x_i ∈ [-5,5] fun = ekly plotter(surface, low = [-5 -5], up = [5 5])

ofDescent(spi, fit = [1.4 1.4], low = [-.1 -.1], up = [2.4 2.4])
Метод золотого сечения
Теория. Хоть реализация сложна, метод порой показывает себя хорошо перепрыгивая локальные минимумы
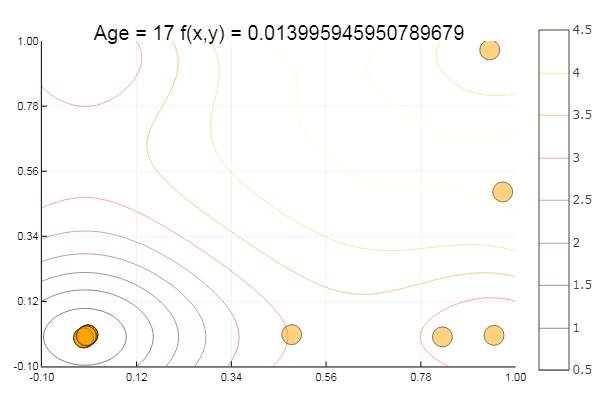
function interval(i, fit, st) d = 0. ab = zeros(2) fitc = copy(fit) ab[1] = fitc[i] Fa = fun(fitc) fitc[i] -= st Fdx = fun(fitc) fitc[i] += st if Fdx < Fa st = -st end fitc[i] += st ab[2] = fitc[i] Fb = fun(fitc) while Fb < Fa d = ab[1] ab[1] = ab[2] Fa = Fb fitc[i] += st ab[2] = fitc[i] Fb = fun(fitc) # println("----", Fb, " ", Fa) end if st < 0 c = ab[2] ab[2] = d d = c end ab[1] = d ab end function goldsection(i, fit, ϵ) ϕ = Base.MathConstants.golden ab = interval(i, fit, 0.01) α = ϕ*ab[1] + (1-ϕ)*ab[2] β = ϕ*ab[2] + (1-ϕ)*ab[1] fit[i] = α Fa = fun(fit) fit[i] = β Fb = fun(fit) while abs(ab[2] - ab[1]) > ϕ if Fa < Fb ab[2] = β β = α Fb = Fa α = ϕ*ab[1] + (1-ϕ)*ab[2] fit[i] = α Fa = fun(fit) else ab[1] = α α = β Fa = Fb β = ϕ*ab[2] + (1-ϕ)*ab[1] fit[i] = β Fb = fun(fit) end println(">>>", i, ab) plot!(ab, w = 1, legend = false, marker = :rect ) end fit[i] = 0.5(ab[1] + ab[2]) end ofDescent(goldsection, fit = [1.4 1.4], low = [-.1 -.1], up = [1. 1.])
На этом с покоординатным спуском всё. Алгоритмы представленных методов довольно просты, так что имплементировать их на предпочитаемом языке не составит труда. В дальнейшем можно рассмотреть встроенные средства языка Julia, но пока хочется всё, так сказать, пощупать руками, рассмотреть методы посложней и поэффективней, затем можно перейти к глобальной оптимизации, попутно сравнивая с реализацией на другом языке.
Литература
- Зайцев В. В. Численные методы для физиков. Нелинейные уравнения и оптимизация: учебное пособие. – Самара, 2005г. – 86с.
- Иванов А. В. Компьютерные методы оптимизации оптических систем. Учебное пособие. –СПб: СПбГУ ИТМО, 2010 – 114с.
- Попова Т. М. Методы многомерной оптимизации: методические указания и задания к выполнению лабораторных работ по дисциплине «Методы оптимизации» для студентов направления «Прикладная математика»/ сост. Т. М. Попова. – Хабаровск: Изд-во Тихоокеан. гос. ун-та, 2012. – 44 с.

