
Начался пятый земной месяц работы на обратной стороне Луны посадочного модуля «Чанъэ-4» и ровера «Юйту-2».
Оба аппарата успешно пережили холодную четвертую лунную ночь, сейчас они вышли из спящего режима, приступив к продолжению своих исследований сложной поверхности обратной стороны Луны и окружающего космического пространства.
Новые фотографии обратной стороны Луны, моментов запуска и посадки миссии.
Внимание, внутри публикации много картинок.
Ранее опубликованные материалы про миссию «Чанъэ-4»:
1. Космический аппарат «Чанъэ-4» совершил успешную посадку на обратной стороне Луны и прислал первое фото
2. Бортовое видео процессов подготовки и совершения посадки, а так же панорама обратной стороны Луны от «Чанъэ-4»
3. Видео процесса спуска ровера «Юйту-2», его первые метры по поверхности Луны. Двухнедельный сон на Луне закончен
4. Гордость и страсть, история о превращении мечты в космический проект
5. Лунный орбитальный зонд NASA сделал первые снимки Китайской станции «Чанъэ-4» — два пикселя света
6. Модуль «Чанъэ-4» и ровер «Юйту-2» готовы ко второй ночи на обратной стороне Луны
7. Лунный орбитальный зонд NASA сделал новые снимки Китайской станции «Чанъэ-4» — ближе и яснее
8. Интересные факты об истории Китайской лунной программы и космической миссии «Чанъэ-4»
9. Миссия «Чанъэ-4» — третий лунный день. Ровер «Юйту-2» в поисках… камней
10. Миссия «Чанъэ-4» — научное оборудование на посадочном модуле и спутнике-ретрансляторе
11. Миссия «Чанъэ-4» — четвертый лунный день для посадочного модуля и ровера «Юйту-2». Про камеры и контроллеры на аппаратах
1. Космический аппарат «Чанъэ-4» совершил успешную посадку на обратной стороне Луны и прислал первое фото
2. Бортовое видео процессов подготовки и совершения посадки, а так же панорама обратной стороны Луны от «Чанъэ-4»
3. Видео процесса спуска ровера «Юйту-2», его первые метры по поверхности Луны. Двухнедельный сон на Луне закончен
4. Гордость и страсть, история о превращении мечты в космический проект
5. Лунный орбитальный зонд NASA сделал первые снимки Китайской станции «Чанъэ-4» — два пикселя света
6. Модуль «Чанъэ-4» и ровер «Юйту-2» готовы ко второй ночи на обратной стороне Луны
7. Лунный орбитальный зонд NASA сделал новые снимки Китайской станции «Чанъэ-4» — ближе и яснее
8. Интересные факты об истории Китайской лунной программы и космической миссии «Чанъэ-4»
9. Миссия «Чанъэ-4» — третий лунный день. Ровер «Юйту-2» в поисках… камней
10. Миссия «Чанъэ-4» — научное оборудование на посадочном модуле и спутнике-ретрансляторе
11. Миссия «Чанъэ-4» — четвертый лунный день для посадочного модуля и ровера «Юйту-2». Про камеры и контроллеры на аппаратах
Ровер «Юйту-2» вышел из спящего режима утром 28 апреля 2019 года, вечером 28 апреля посадочный модуль «Чанъэ-4» тоже проснулся, и оба аппарата начали свою пятую дневную смену на Луне.
Ночью на обратной стороне Луны, по данным датчиков модулей «Чанъэ-4», температура на лунной поверхности опускается (минимум) до минус 190 градусов по Цельсию.
За подогрев модулей «Чанъэ-4» в процессе лунной ночи отвечают тепловые блоки, разработанные в Российском федеральном ядерном центре (ВНИИ экспериментальной физики (ВНИИЭФ), это радиационные источники тепла (РИТ) и радиоизотопные источники электроэнергии (РИТЭГ), предназначенные для энергоснабжения систем китайской лунной миссии.
Данные по проекту и модулям лунной миссии «Чанъэ-4»:
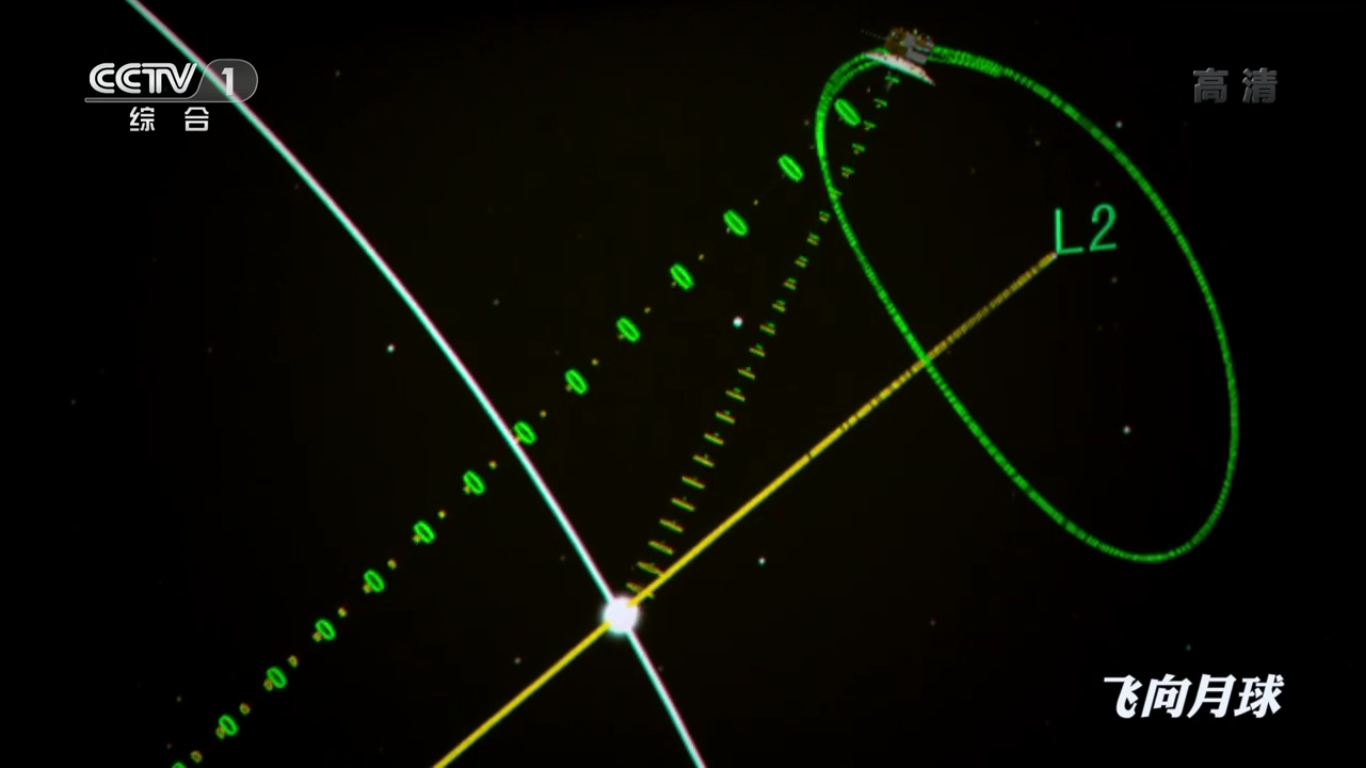
21 мая 2018 года: с Китайского космодрома Сичан запущен спутник-ретранслятор «Цэюцяо» (сорочий мост), он необходим для организации связи между Землей и обратной стороной Луны.
14 июня 2018 года: Cпутник-ретранслятор «Цэюцяо» вышел на гало орбиту вокруг точки Лагранжа L2 системы «Земля-Луна», примерно в 65000 км от Луны, став первым в мире спутником связи, работающим на этой орбите.
8 декабря 2018 года: Ракета-носитель «Чанчжэн-3B» со станцией «Чанъэ-4» успешно запущена с Китайского космодрома «Сичан».
3 января 2019 года: спускаемый аппарат «Чанъэ-4» совершает посадку в кратере «Карман» на обратной стороне Луны. В составе посадочного аппарата «Чанъэ-4» находится второй Китайский лунный ровер «Юйту-2», модернизированный аналог ровера «Юйту». Аппараты миссии «Чанъэ-4» продолжают сейчас работать в штатном режиме.
Видео процедуры посадки на обратную сторону Луны:
После окончания всех этапов процедуры успешной посадки и установки независимых каналов связи с аппаратами «Чанъэ-4» (посадочным модулем и ровером), началась эра исследования обратной стороны Луны.
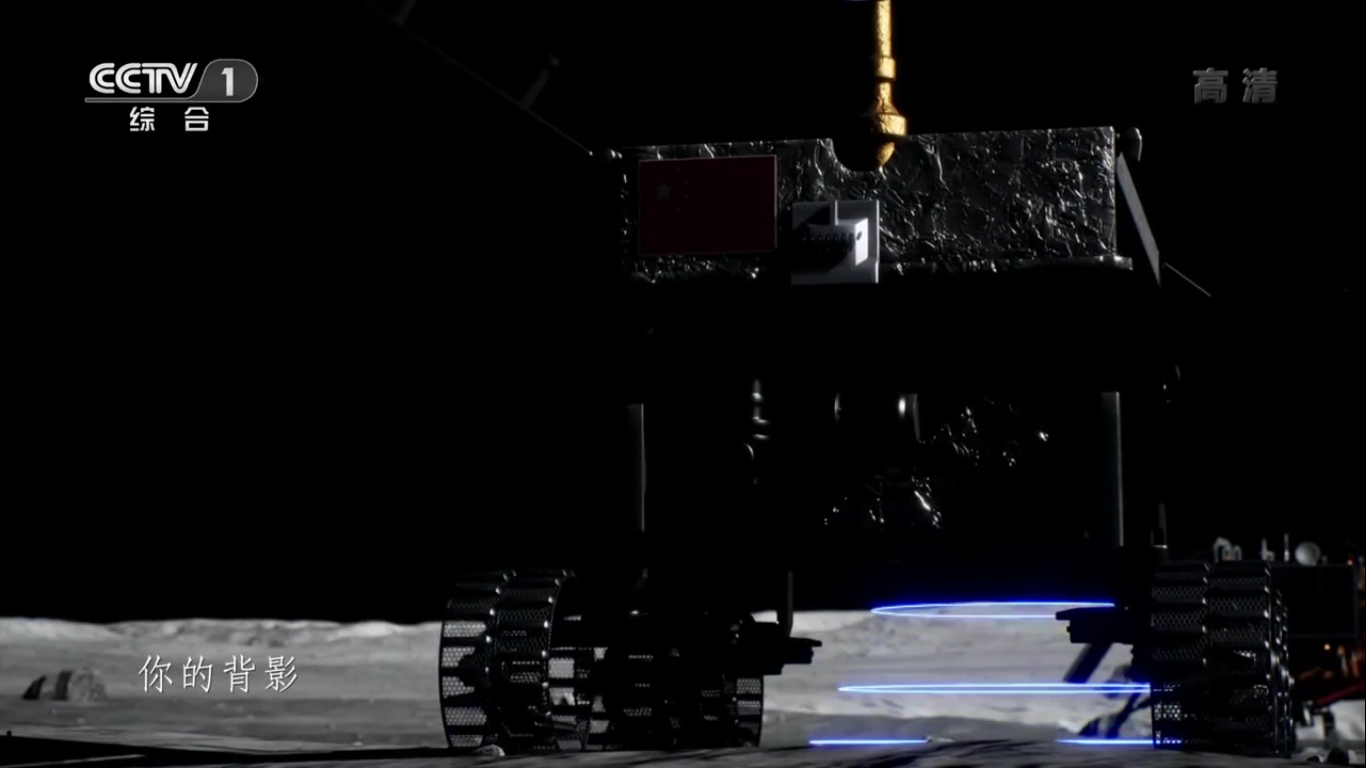
Видео спуска ровера «Юйту-2»:
Видео путешествия ровера «Юйту-2»:
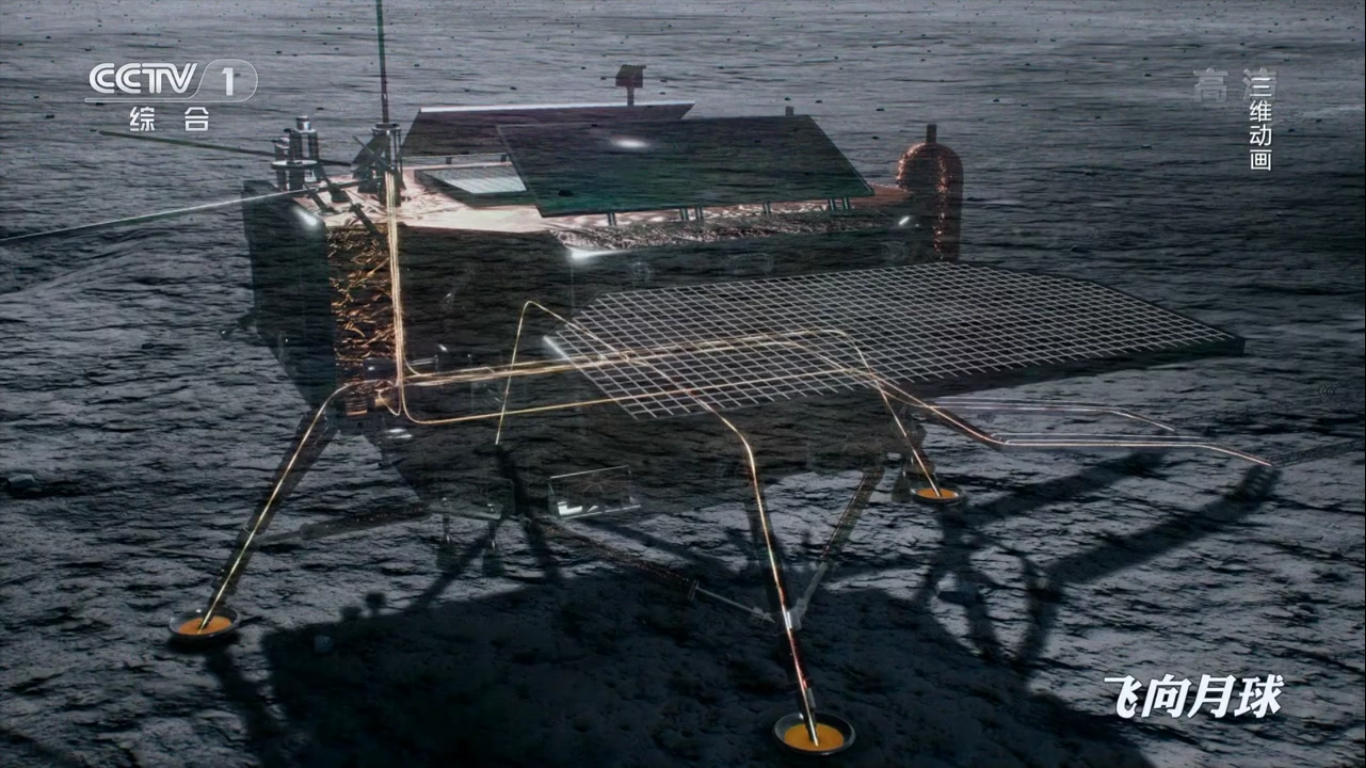
Спускаемый модуль «Чанъэ-4»:
- 4,4 метра между противоположными посадочными опорами, масса 1200 кг.;
- продолжительность работы: один земной год.
Установлены приборы:
- LFS — Low Frequency Spectrometer (низкочастотный спектрометр);
- LND — Lunar Lander Neutrons and Dosimetry (нейтронный дозиметр);
- TCAM — Terrain Camera (ландшафтная камера);
- LCAM — Landing Camera (посадочная камера).

Ровер «Юйту-2»:
- высота 1 метр, ширина 1 метр (без солнечных батарей), 1,5 метра в длину, две складные солнечные панели, шесть колес;
- общая масса ровера составляет около 140 кг (310 фунтов);
- грузоподъемность — около 20 кг (44 фунта);
- может перемещаться по наклонам и имеет автоматические датчики, предотвращающие столкновение с другими объектами;
- электроэнергией ровер обеспечивается с помощью двух солнечных батарей, позволяющих роверу работать в течение лунного дня;
- максимальная скорость 200 метров в час (данную скорость на Луне все равно не достигнуть, так как элементы на поверхности не дадут разогнаться и выведут из строя ровер раньше);
- максимальная площадь исследования – 3 кв. км;
- расчетное время работы – 3 месяца (2160 часов), ровер уже превысил свой срок службы;
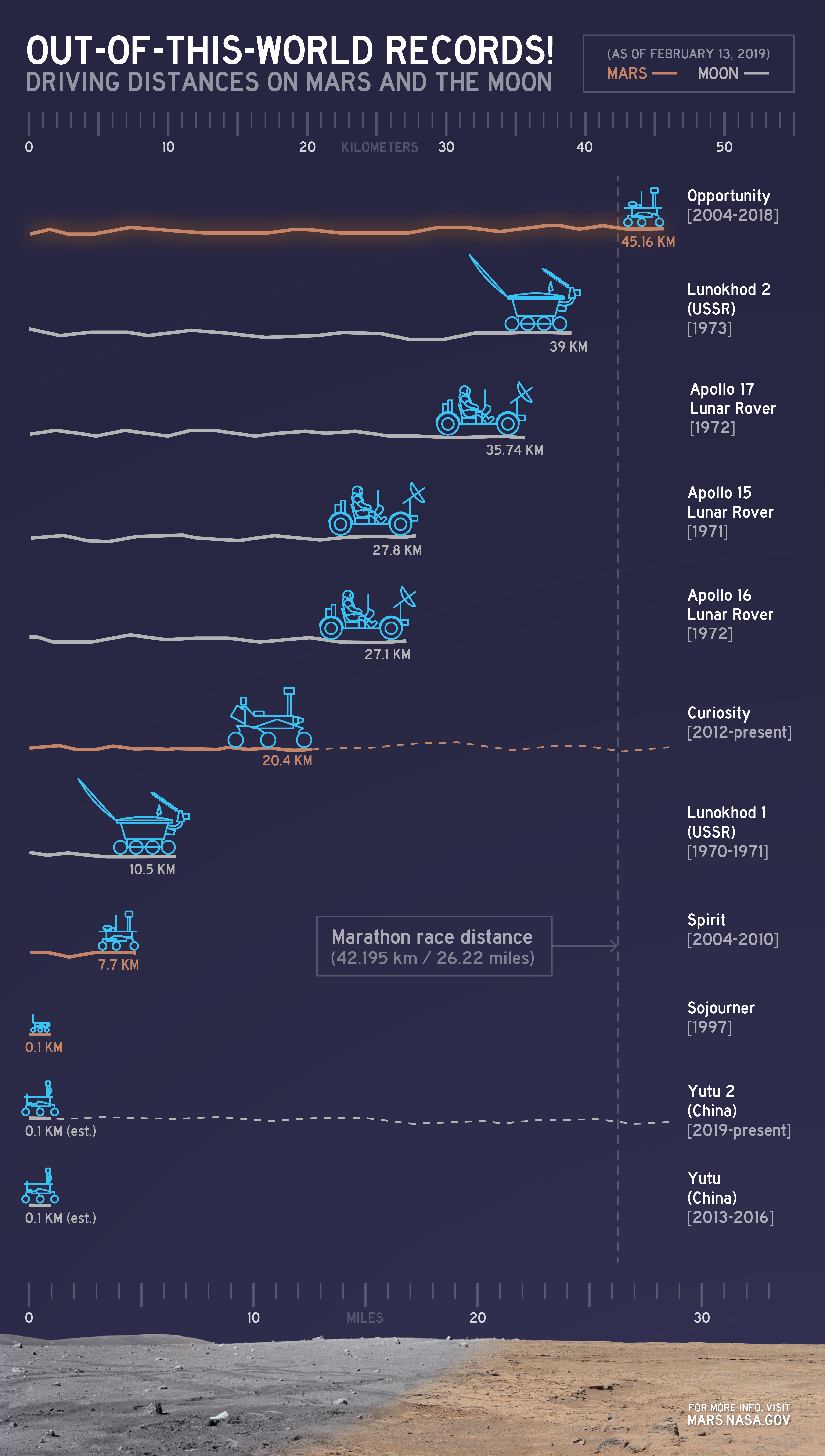
- максимальная расчетная дистанция – 10 км, сейчас пройдено 178.9 метра по лунной поверхности за пять месяцев (1 место среди роверов на обратной стороне Луны, шестое место среди всех лунных роверов), таблица расстояния роверов приведена тут;
- режим управления: автоматический (объезд небольших препятствий), ручной (основной) — оператор управляет с Земли.
Установлены приборы:
- LPR — Lunar Penetrating Radar;
- ASAN — Advanced Small Analyzer for Neutrals (малый анализатор нейтральных частиц);
- VNIS — Visible and Near-Infrared Imaging Spectrometer (инфракрасный спектрометр);
- PCAM — Panoramic Camera (двойная панорамная камера).

Фото ровера на Земле:




Cпутник-ретранслятор «Цэюцяо» (сорочий мост), запущенный в 21 мая 2018 года, работает на гало-орбите вокруг особой гравитационно стабильной точки Лагранжа Земля-Луна L2, из которой он может поддерживать прямую видимость с Землей и лунной обратной стороной в любое время для обмена данными между ЦУП и модулями проекта «Чанъэ-4».

Так же на спутнике-ретрансляторе «Цэюцяо» установлен низкочастотный спектрометр (relay LFS) с тремя пятиметровыми антеннами, с помощью которого регистрируется низкочастотное радиоизлучение ранней Вселенной, позволяющее изучить ее структуру.

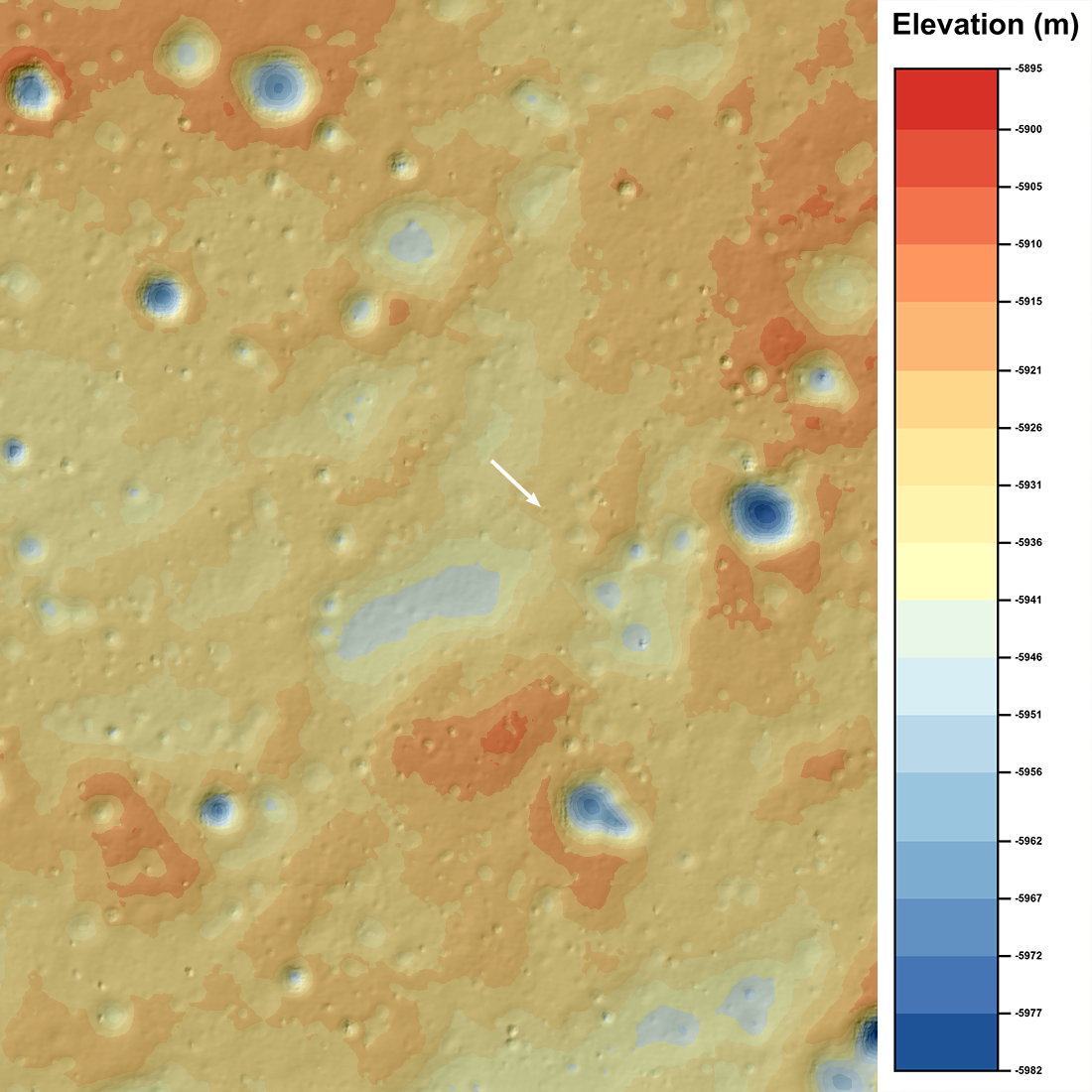
Обратная сторона Луны имеет более сложный рельеф, чем видимая с Земли сторона. Лунная поверхность в зоне высадки посадочного модуля «Чанъэ-4» изобилует складками, многочисленными камушками и небольшими кратерами.


Топографическая фотография зоны посадки в кратере Карман обратной стороны Луны спускаемого модуля «Чанъэ-4» (сделано зондом LRO, NASA):


Новые фотографии лунной поверхности с камер посадочного модуля «Чанъэ-4» и ровера «Юйту-2».
Очень одинокий посадочный модуль «Чанъэ-4»:

Следы ровера «Юйту-2».:

Поверхность обратной стороны Луны:






Ранее присланные на Землю фотографии поверхности обратной стороны Луны:
Лунная колея от колес ровера «Юйту-2» и тень от антенны и площадки с панорамной камерой:

Несколько кратеров (с тенями красиво) и горы на заднем плане:

А вот эти фотографии из научной статьи «Lunar farside to be explored by Chang’e-4» апрельского номера журнала «Nature Geoscience».

Небольшие кратеры около места посадки:


Ровер «Юйту-2» исследует поверхность Луны:

Осколки камней в небольших кратерах (фото с ровера «Юйту-2»):

Небольшие камни по ходу движения ровера «Юйту-2»:

Очень необычные темные камни около места посадки:

Фотографии с камер аппаратов:
Landing camera LCAM:







Terrain camera TCAM:












Panoramic camera PCAM (ровер):




Новые моменты в истории реализации проекта «Чанъэ-4»
8 декабря 2018 года: Ракета-носитель «Чанчжэн-3B» с полезной нагрузкой (станция «Чанъэ-4») успешно запущена с Китайского космодрома «Сичан».
Старт ракета-носителя «Чанчжэн-3B»:



Финиш обратного отсчета:






Отделение полезной нагрузки:

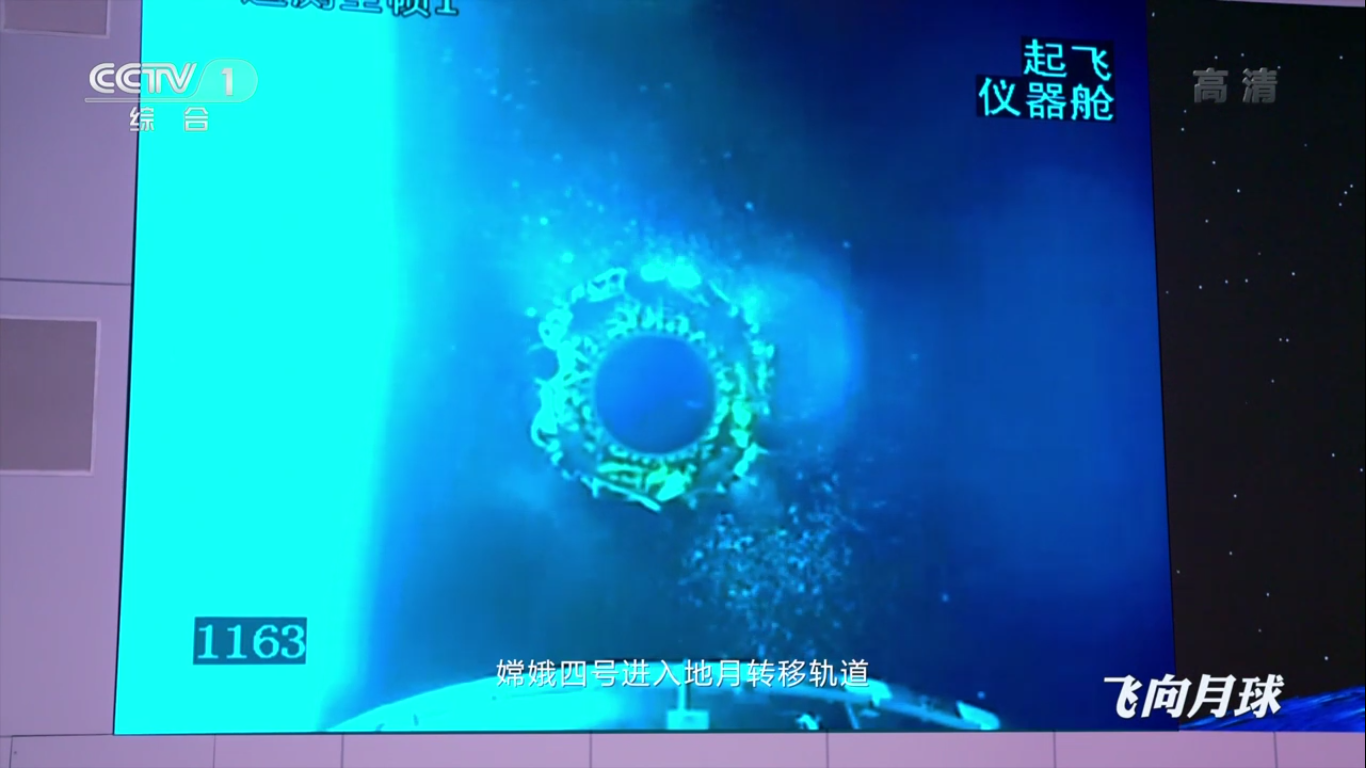


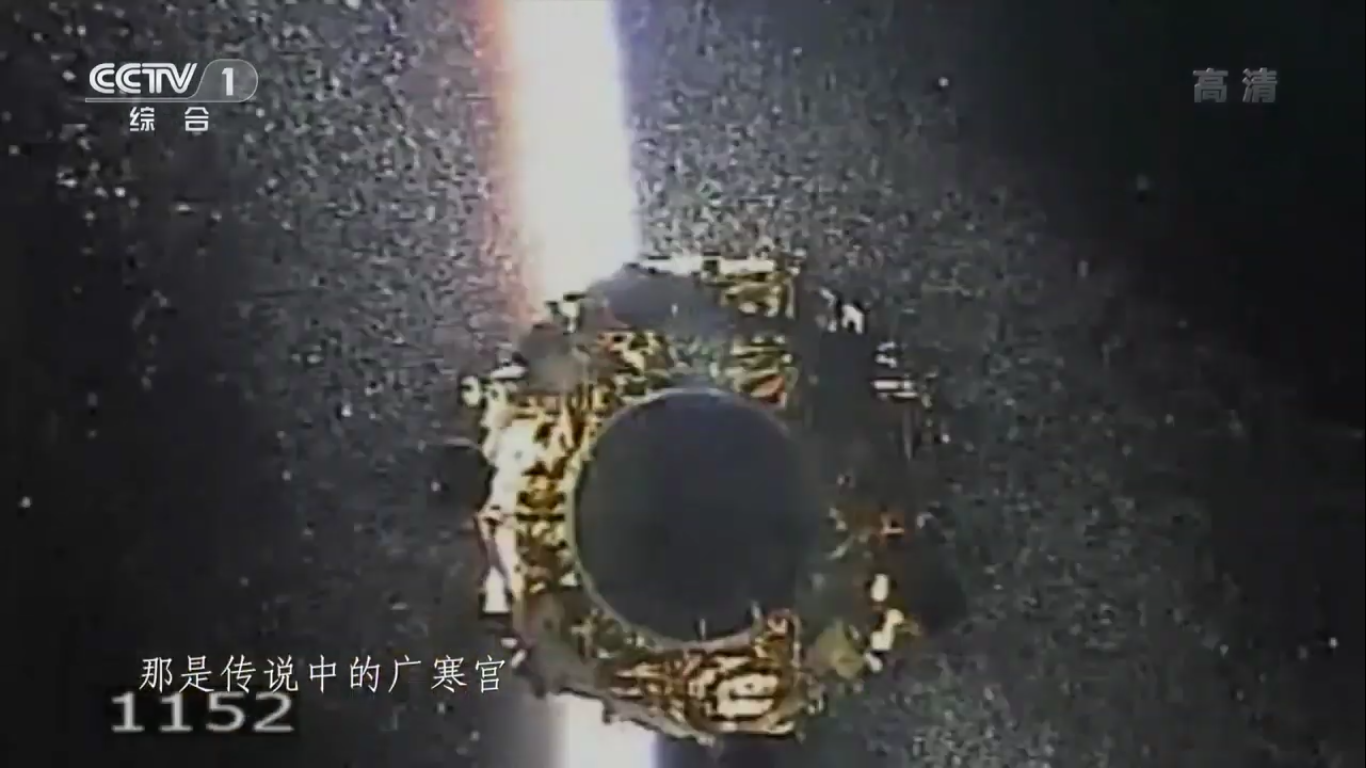

Позиционирование полезной нагрузки уже в космическом пространстве:

3 января 2019 года: спускаемый аппарат «Чанъэ-4» совершает посадку в кратере «Карман» на обратной стороне Луны.

В центре управления полетами Китайской академии космических технологий:



Чжан Хэ — исполнительный директор проекта «Чанъэ-4» на своем посту:

Интересные иконки:






В центре космической связи:

Подготовка к посадке:

Место посадки «нужно поймать» очень аккуратно:





Клавиатуры у некоторых операторов нет:


Процесс посадки:



Связь с помощью спутника-ретранслятора:



Есть посадка:



Подготовка к спуску ровера:


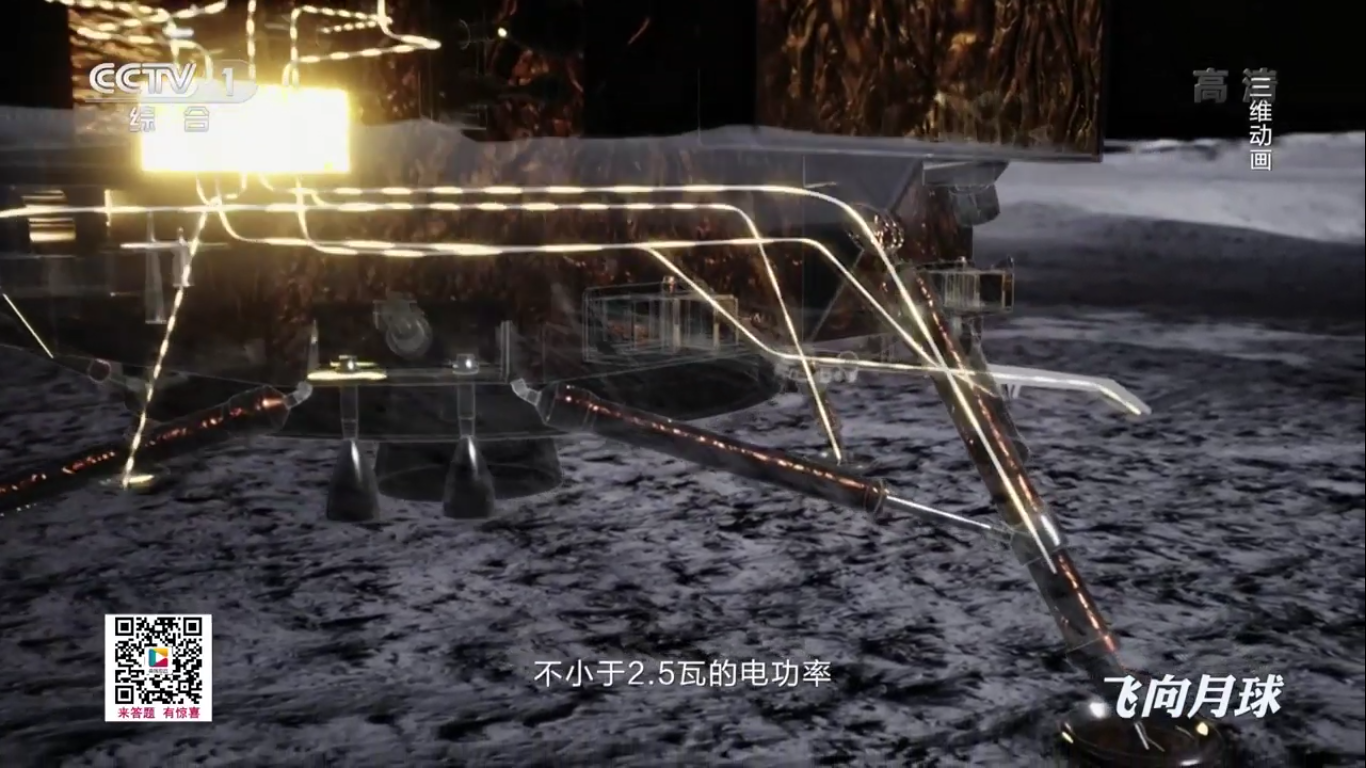
Каждая посадочная опора спускаемого модуля «Чанъэ-4» имеет датчик касания поверхности, а еще в опоры и спускаемую рампу для ровера встроены температурные датчики, которые работали в лунную ночь, фиксируя данные по температуре поверхности Луны.
По данным датчиков модулей «Чанъэ-4», температура на лунной поверхности ночью опускалась (минимум) до минус 190 градусов по Цельсию.



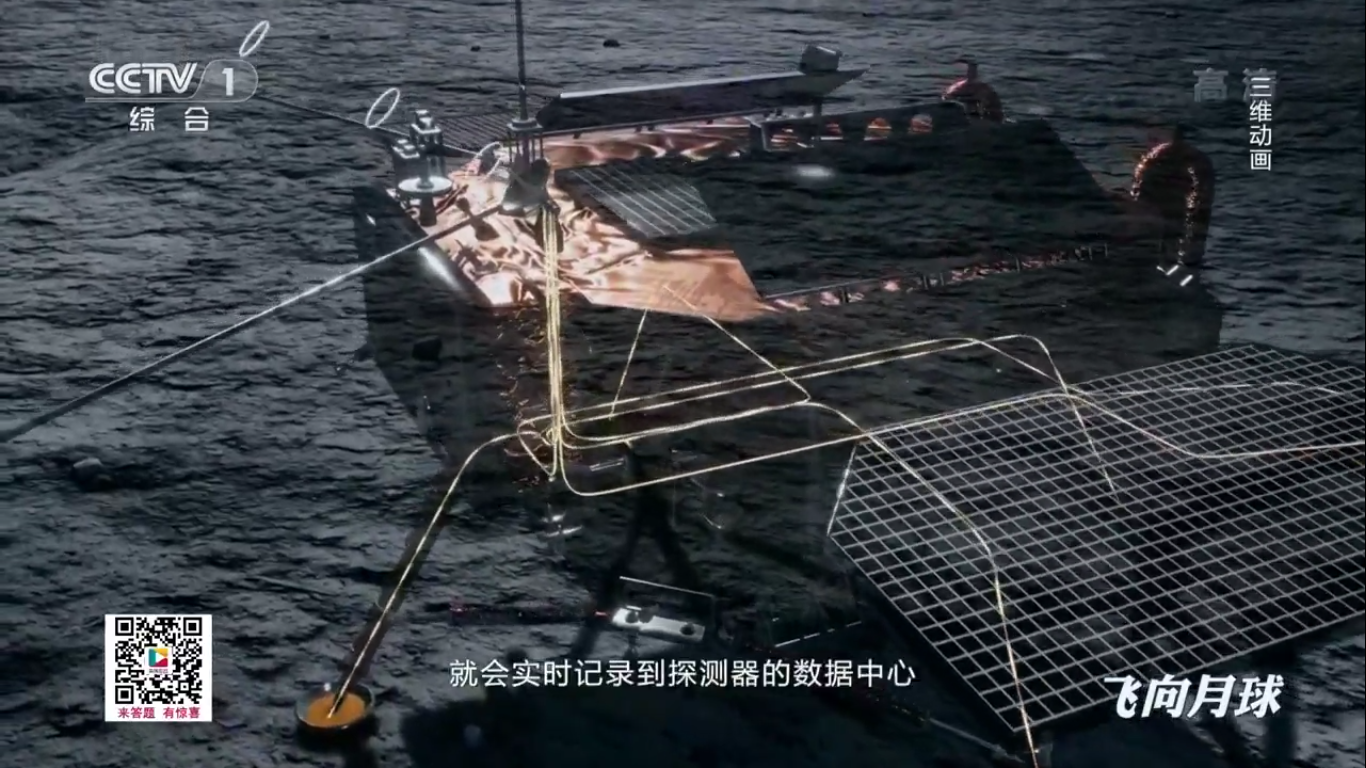



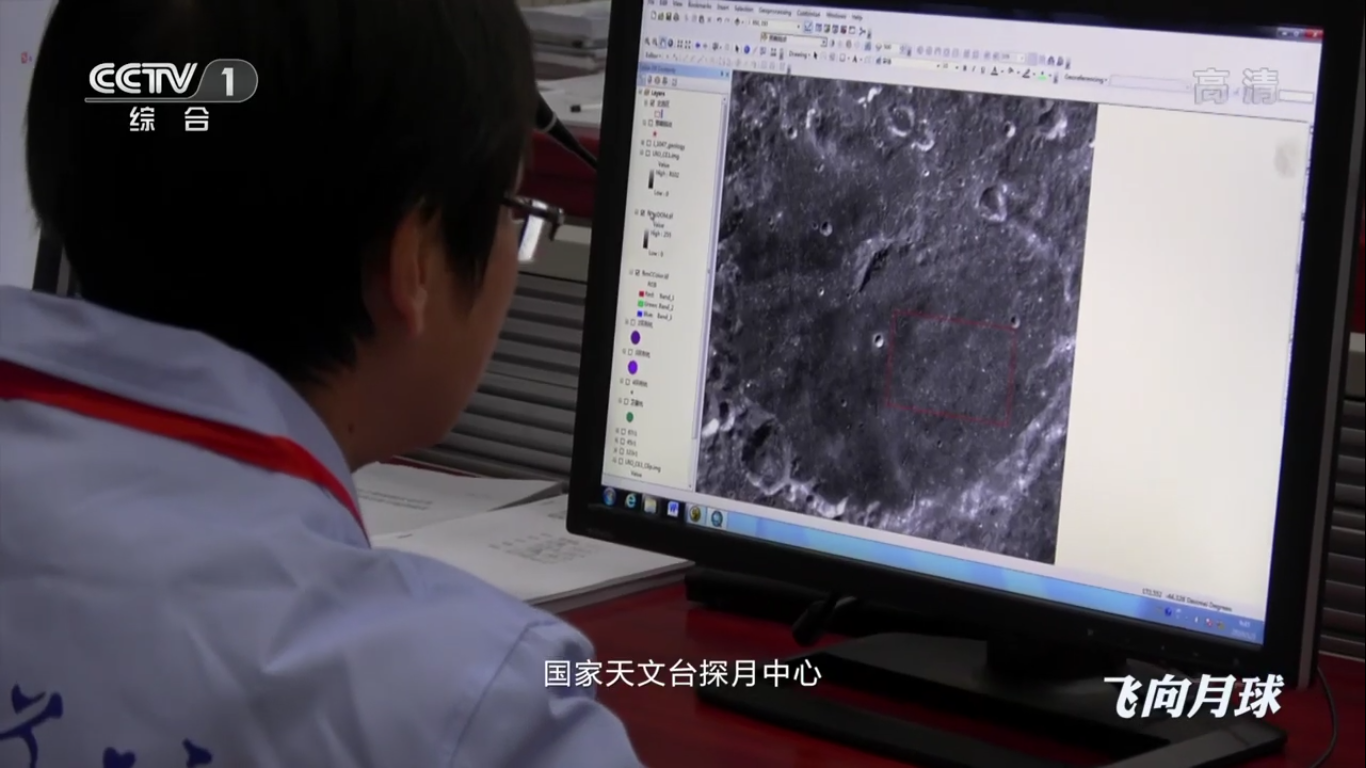
Получение и обработка данных в центре космической связи:

Операторы ровера «Юйту-2» полагаются на свои виртуальные карты поверхности:


Фотографии места посадки модулей «Чанъэ-4», которые сделал лунный орбитальный зонд LRO (NASA):

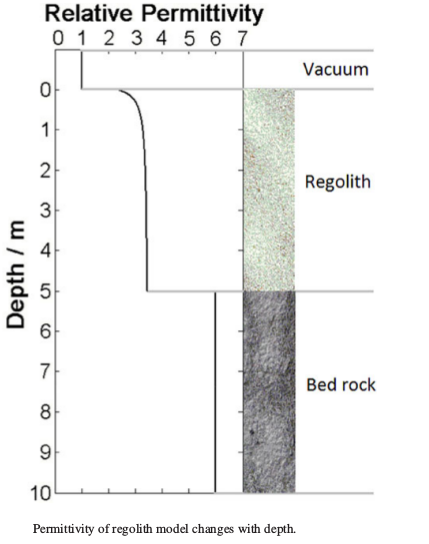
С помощь специального радара (внешняя часть которого — это две антенны-усика и плоская антенна под днищем), лучи которого проникают под поверхность Луны (LPR — Lunar Penetrating Radar) ровер «Юйту-2» создает трехмерную карту подземной части лунной поверхности:



Характеристики Lunar Penetrating Radar (LPR):
Channel 1:
— Transmitter Voltage — 1000 V (error <5%)
— Transmitter Pulse frequency — 0.5, 1, 2 kHz
— Transmitter Pulse time of arrival — <= 5 ns
— Receiver frequency — 10-175 MHz
— Receiver input dynamic range — >90 dB
— Antenna central frequency — 60 MHz
— Antenna bandwidth — >=40 MHz
— Standing wave function — <= 3
— Maximum detection depth — >= 100 m
— Depth resolution — 1 m
Channel 2:
— Transmitter Voltage — >= 400 V (error <5%)
— Transmitter Pulse frequency — 5, 10, 20 kHz
— Transmitter Pulse time of arrival — <= 1 ns
— Receiver frequency — 10-1000 MHz
— Receiver input dynamic range — >90 dB
— Antenna central frequency — 500 MHz
— Antenna bandwidth — >=450 MHz
— Standing wave function — <= 2.5
— Maximum detection depth — >= 30 m
— Depth resolution — <= 30 cm
Lunar Penetrating Radar (LPR), установленный на ровере «Юйту-2» аналогичен по своему устройству радару, установленному на первом ровере «Юйту» миссии «Чанъэ-3».
Данные, полученные от радара LPR анализирутся и сводятся в графики, на которых можно отследить геологический состав и характеристики лунной поверхности в районе приземления:

Ученые и инженеры в центре управления полетами Китайской академии космических технологий стараются максимально использовать время пятого лунного дня (две земные недели) для проведение научных исследований и получении данные с приборов посадочного модуля «Чанъэ-4» и ровера «Юйту-2».
Более подробно про научное оснащение посадочного модуля «Чанъэ-4» и ровера «Юйту-2» можно почитать тут:
Миссия «Чанъэ-4» — третий лунный день. Ровер «Юйту-2» в поисках… камней
Миссия «Чанъэ-4» — научное оборудование на посадочном модуле и спутнике-ретрансляторе
Кстати, 24 апреля 2019 года (в день китайской космонавтики) прошел конкурс детского творчества, организованный Китайским аэрокосмическим обществом, посвященный покорению космоса и Луны.
Работы детей великолепны.
Го Жичен — Исследуя Вселенную в будущем

Хань Цзясинь — Мы вышли в космос

Дэн Сянюэ — Сад за пределами Вселенной

Тянь Cянь — Космическая станция будущего

Чжэн Юйфэн — Раскрасим пространство вместе

Фан Юнсинь — Станция преобразования энергии

Ли Мэнъин — Глобальная Солнечная Система

Сюй Чжиюнь — Исследователи

Ян Хаовань — Космическая база

Ян Цзинру — Вакуум Сити

Чжуо Сиюань — Плывущий космический корабль

Чжоу Иньо- Mora No.1451

Мне вот понравилась особенно эти произведения:
Вэй Вэй — Мое сердце полно звезд

Дай Цзяи — Мечтающий о космосе

Лю Жуйян — Моя музыка в космосе



{kind=link}