В конце прошлого года, я написал статью, о том как был заинтригован возможностью распознавания объектов на изображениях с помощью нейронных сетей. В той статье мы с помощью PyTorch классифицировали на видео либо ягоду малину, либо ардуино-подобный контроллер. И не смотря на то, что PyTorch мне понравился, обратился я к нему потому, что не смог с наскока разобраться с TensorFlow. Но я пообещал, что ещё вернусь к вопросу распознавания объектов на видео. Кажется пришло время сдержать обещание.
В данной статье мы попробуем на своей локальной машине дообучить уже готовую модель в Tensorflow 1.13 и Object Detection API на нашем собственном наборе изображений, а потом используем её для распознавания ягод и контроллеров, в видеопотоке веб-камеры с помощью OpenCV.
Хотите к лету улучшить навык распознавания ягод? Тогда милости прошу под кат.

Содержание:
Часть I: введение
Часть II: обучаем модель в TenosrFlow
Часть III: применяем модель в OpenCV
Часть IV: заключение
Те кто ознакомился с прошлой статьей про PyTorch, уже знают, что я дилетант в вопросах нейронных сетей. Поэтому не стоит воспринимать, эту статью, как истину в последней инстанции. Но так или иначе я надеюсь, что смогу кому-то помочь разобраться с азами распознавания видео с помощью Tensorflow Object Detection API.
В этот раз я не стремился сделать туториал, поэтому статья выйдет короче чем обычно.
Начну с того, что официальный туториал по применению Object Detection API на локальной машине, мягко говоря сложно назвать исчерпывающим. Мне, как новичку информации было совершенно недостаточно и пришлось ориентироваться на статьи в блогах.
Если честно мне бы хотелось попробовать TensorFlow 2.0, но в большинстве публикаций, на момент написания этой статьи, были не полностью решены вопросы миграции. Поэтому в итоге я остановился на TF 1.13.2.
Инструкции по обучению модели я черпал из этой статьи , а точнее из её первой половины, до момента применения JavaScript (Если вы не владеете английским, можно посмотреть статью на эту же тему на Хабре).
Правда в моем случае есть несколько отличий:
Так же на всякий случай, скажу, что я не использовал графический ускоритель. Обучение производилось только на мощностях процессора.
Набор изображений, конфигурационный файл, сохраненный граф, а также скрипт для распознавания изображения с помощью OpenCV, как всегда можно скачать с GitHub.
Прошли долгие 23 часа обучения модели, весь чай в доме уже выпит, “Что? Где? Когда?” досмотрено и вот мое терпение окончательно подошло к концу.
Останавливаем обучение и сохраняем модель.
Устанавливаем в тоже самое окружение “Анаконды” OpenCV, следующей командой:
У меня в итоге установлена версия 4.2
Дальше инструкции из этой статьи нам уже будут не нужны.
После сохранения модели я сделал одну неочевидную для меня ошибку, а именно сразу попытался подставить использованный ранее в папке training/ файл graph.pbtxt в функцию:
К сожалению, это так не работает и нам придется проделать еще одну манипуляцию, чтобы получить graph.pbtxt для OpenCV.
Скорее всего, то что я сейчас посоветую не очень хороший способ, но для меня он работает.
Скачаем tf_text_graph_ssd.py, а также tf_text_graph_common.py положим их в папку, где лежит наш сохраненный граф (у меня это папка inference_graph).
Затем перейдем в консоли в эту папку и выполним из неё команду примерно следующего содержания:
Вот и всё осталось только загрузить нашу модель в OpenCV.
Как и в статье про PyTorch в части работы с OpenCV я брал за основу программный код из этой публикации.
Я внес небольшие изменения, чтобы его еще немного упростить, но поскольку я не полностью понимаю код, то и комментировать его не буду. Работает и славно.Понятно, что код мог бы быть и лучше, но у меня пока нет времени, чтобы засесть за учебники по OpenCV .
Итак, всё готово. Запускаем модель, наводим объектив на мою старенькую CraftDuino и радуемся результату:

На первый взгляд совсем не дурно, но это только на первый взгляд.
Похоже за 23 часа, модель переобучилась, поэтому выдает серьезные ошибки при определении объектов.
Вот наглядная демонстрация:
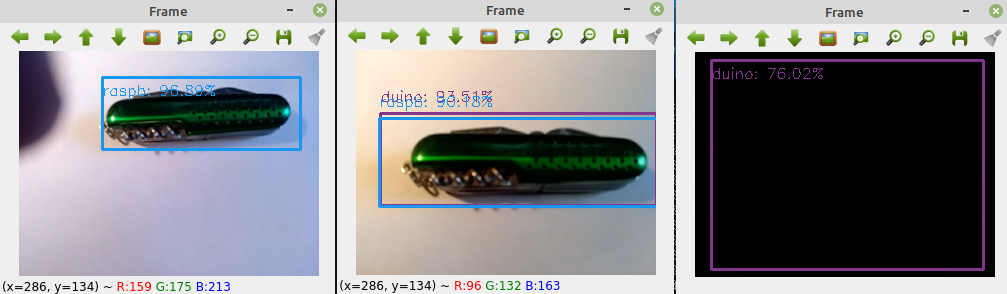
Как видно, не только ножик, но даже просто черный фон, эта модель определяет как ардуино-подобный контроллер. Возможно, всё потому, что в тренировочных данных были темные картинки с Arduino и его аналогами, на которые модель за 23 часа успела натаскаться.
В итоге пришлось загружать свой компьютер еще на 8 часов и обучать новую модель.
С ней дела обстоят намного лучше.
Вот пример с CraftDuino:

Живой малины у меня под рукой нет. Пришлось печатать картинки. С экрана телефона или монитора тоже можно распознать, но с бумаги было удобней.

Проверим, как модель распознает Arduino nano, которую в свое время DrZugrik для меня впаял в свое мега устройство с датчиками:

Как видите распознает вполне хорошо, однако при очень неудачном ракурсе и при теплом освещении, может некоторые фрагменты распознать, как малину. Но на самом деле кадр с ошибкой было тяжело поймать в объектив.
Теперь проверим, как она классифицирует те объекты на которых не обучалась.
Снова пример с ножом и черным фоном:
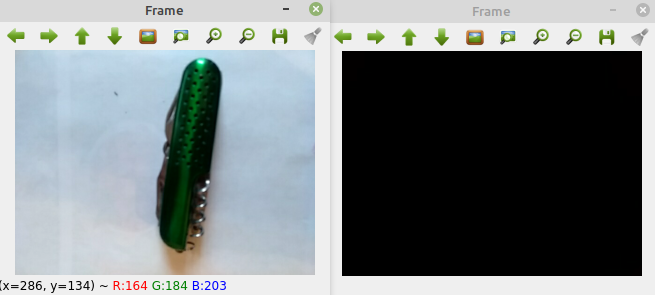
В этот раз все работает, как надо.
Предложим нашей модели распознать контроллер Canny 3 tiny, о котором я писал в прошлой статье.

Поскольку наша модель не знает ни о чем, кроме ягоды малины и ардуино-подобных контроллеров, то можно сказать, что модель распознала контроллер Canny вполне успешно.
Правда, как и в случае с Arduino nano, многое зависит от ракурса и освещения.
При теплом свете лампы накаливания и при неудачном ракурсе, контроллер может не только не распознаваться, но даже определиться как малина. Правда, как и в прошлом случае, эти ракурсы еще надо было постараться поймать в объектив.

Ну и последний случай — своеобразный реверанс статье про классификацию изображений в PyTorch. Как и в прошлый раз совместим в одном кадре одноплатный компьютер Raspberry Pi 2 и его логотип. В отличие от прошлой статьи, в которой мы решали задачу классификации и выбирали один наиболее вероятный объект для изображения, в данном случае распознается и логотип и сама «Малина».

В заключение хочется сказать, что не смотря на то, что по неопытности этот небольшой пример работы с Tensorflow Object Detection API отнял у меня оба выходных и часть понедельника, я ни о чем не жалею. Когда хоть немного разберешся, как этим всем пользоваться становится безумно любопытно. В процессе обучения начинаешь относится к модели, как к живой, следишь за её успехами и неудачами.
Поэтому, рекомендую всем кто с этим не знаком однажды попробовать, распознать что-нибудь свое.
Тем более, как выснилось в процессе, вам даже не нужно покупать настоящую веб-камеру. Дело в том, что во время подготовки статьи я умудрился доломать свою веб-камеру (сломал механизм фокусировки) и уже думал, что придется всё забросить. Но оказалось, что с помощью Droidcam можно использовать смартфон вместо веб-камеры (не сочтите за рекламу). Причем качество съемки получилось сильно лучше, чем у сломавшейся камеры, а это весьма влияло на качество распознавания объектов на изображении.
Кстати поскольку в Anaconda нормальную сборку pycocotools я нашел только для Linux, а переключаться в процессе работы между операционными системами мне было лень, то всю эту статью я подготовил только с использованием oпрограмного обеспечения с открытым исходным кодом. Нашлись аналоги и Word и Photoshop и даже драйвер для принтера. Первый раз в моей жизни случилось такое. Оказалось, что современные версии ОС Linux и прикладных программ могут быть очень удобными, даже для человека более 25 лет использующего ОС от Microsoft.
P.S. Если кто-то знает, как нормально запустить Object Detection API
для Tensorflow версии 2 и выше, отпишитесь пожалуйста в личку или в комментарии.
Всем хорошего дня и крепкого здоровья!
В данной статье мы попробуем на своей локальной машине дообучить уже готовую модель в Tensorflow 1.13 и Object Detection API на нашем собственном наборе изображений, а потом используем её для распознавания ягод и контроллеров, в видеопотоке веб-камеры с помощью OpenCV.
Хотите к лету улучшить навык распознавания ягод? Тогда милости прошу под кат.
Содержание:
Часть I: введение
Часть II: обучаем модель в TenosrFlow
Часть III: применяем модель в OpenCV
Часть IV: заключение
Часть I: введение
Те кто ознакомился с прошлой статьей про PyTorch, уже знают, что я дилетант в вопросах нейронных сетей. Поэтому не стоит воспринимать, эту статью, как истину в последней инстанции. Но так или иначе я надеюсь, что смогу кому-то помочь разобраться с азами распознавания видео с помощью Tensorflow Object Detection API.
В этот раз я не стремился сделать туториал, поэтому статья выйдет короче чем обычно.
Начну с того, что официальный туториал по применению Object Detection API на локальной машине, мягко говоря сложно назвать исчерпывающим. Мне, как новичку информации было совершенно недостаточно и пришлось ориентироваться на статьи в блогах.
Если честно мне бы хотелось попробовать TensorFlow 2.0, но в большинстве публикаций, на момент написания этой статьи, были не полностью решены вопросы миграции. Поэтому в итоге я остановился на TF 1.13.2.
Часть II: обучаем модель в TensorFlow
Инструкции по обучению модели я черпал из этой статьи , а точнее из её первой половины, до момента применения JavaScript (Если вы не владеете английским, можно посмотреть статью на эту же тему на Хабре).
Правда в моем случае есть несколько отличий:
- Я использовал Linux, потому что в Anaconda для Linux уже есть собранные protobuf и pycocoapi, поэтому мне не пришлось их собирать самому.
- Я использовал версию TensorFlow 1.13.2, а также ветку Object Detection API 1.13 потому, что актуальная ветка выдавала ошибку с TensorFlow 1.13.2. Текущую ветку master мне вроде бы удавалось запустить с версией TF 1.15, но для этой статьи я остановился на версии 1.13.
- Необходимо будет установить более старую версию numpy — 1.17.5, версия 1.18 вызывала у меня ошибку.
- Вместо модели faster_rcnn_inception_v2_coco мы будем использовать ssd_mobilenet_v2_coco, поэтому будут небольшие изменения, но всё делается по аналогии.
Так же на всякий случай, скажу, что я не использовал графический ускоритель. Обучение производилось только на мощностях процессора.
Набор изображений, конфигурационный файл, сохраненный граф, а также скрипт для распознавания изображения с помощью OpenCV, как всегда можно скачать с GitHub.
Прошли долгие 23 часа обучения модели, весь чай в доме уже выпит, “Что? Где? Когда?” досмотрено и вот мое терпение окончательно подошло к концу.
Останавливаем обучение и сохраняем модель.
Устанавливаем в тоже самое окружение “Анаконды” OpenCV, следующей командой:
conda install -c conda-forge opencv
У меня в итоге установлена версия 4.2
Дальше инструкции из этой статьи нам уже будут не нужны.
После сохранения модели я сделал одну неочевидную для меня ошибку, а именно сразу попытался подставить использованный ранее в папке training/ файл graph.pbtxt в функцию:
cv2.dnn.readNetFromTensorflow()
К сожалению, это так не работает и нам придется проделать еще одну манипуляцию, чтобы получить graph.pbtxt для OpenCV.
Скорее всего, то что я сейчас посоветую не очень хороший способ, но для меня он работает.
Скачаем tf_text_graph_ssd.py, а также tf_text_graph_common.py положим их в папку, где лежит наш сохраненный граф (у меня это папка inference_graph).
Затем перейдем в консоли в эту папку и выполним из неё команду примерно следующего содержания:
python tf_text_graph_ssd.py --input frozen_inference_graph.pb --config pipeline.config --output graph.pbtxt
Вот и всё осталось только загрузить нашу модель в OpenCV.
Часть III: применяем модель в OpenCV
Как и в статье про PyTorch в части работы с OpenCV я брал за основу программный код из этой публикации.
Я внес небольшие изменения, чтобы его еще немного упростить, но поскольку я не полностью понимаю код, то и комментировать его не буду. Работает и славно.Понятно, что код мог бы быть и лучше, но у меня пока нет времени, чтобы засесть за учебники по OpenCV .
Код для работы с OpenCV
# USAGE # based on this code https://proglib.io/p/real-time-object-detection/ # import the necessary packages from imutils.video import VideoStream from imutils.video import FPS import numpy as np import imutils import time import cv2 prototxt="graph.pbtxt" model="frozen_inference_graph.pb" min_confidence = 0.5 # initialize the list of class labels MobileNet SSD was trained to # detect, then generate a set of bounding box colors for each class CLASSES = ["background", "duino","raspb"] COLORS = [(40,50,60),((140,55,130)),(240,150,25)] # load our serialized model from disk print("[INFO] loading model...") net =cv2.dnn.readNetFromTensorflow(model,prototxt) # initialize the video stream, allow the cammera sensor to warmup, # and initialize the FPS counter print("[INFO] starting video stream...") vs = VideoStream(src=0).start() time.sleep(0.5) fps = FPS().start() # loop over the frames from the video stream while True: # grab the frame from the threaded video stream and resize it # to have a maximum width of 400 pixels frame = vs.read() frame = imutils.resize(frame, width=300) # grab the frame dimensions and convert it to a blob (h, w) = frame.shape[:2] blob = cv2.dnn.blobFromImage(frame, size=(300, 300), swapRB=True) # pass the blob through the network and obtain the detections and # predictions net.setInput(blob) detections = net.forward() # loop over the detections for i in np.arange(0, detections.shape[2]): # extract the confidence (i.e., probability) associated with # the prediction print (detections) confidence = detections[0, 0, i, 2] if confidence > min_confidence: # extract the index of the class label from the # `detections`, then compute the (x, y)-coordinates of # the bounding box for the object idx = int(detections[0, 0, i, 1]) box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) (startX, startY, endX, endY) = box.astype("int") # draw the prediction on the frame label = "{}: {:.2f}%".format(CLASSES[idx], confidence * 100) cv2.rectangle(frame, (startX, startY), (endX, endY), COLORS[idx], 2) y = startY - 15 if startY - 15 > 15 else startY + 15 cv2.putText(frame, label, (startX, y+3), cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 1) # show the output frame cv2.imshow("Frame", frame) key = cv2.waitKey(1) & 0xFF # if the `q` key was pressed, break from the loop if key == ord("q"): break # update the FPS counter fps.update() # stop the timer and display FPS information fps.stop() print("[INFO] elapsed time: {:.2f}".format(fps.elapsed())) print("[INFO] approx. FPS: {:.2f}".format(fps.fps())) # do a bit of cleanup cv2.destroyAllWindows() vs.stop()
Итак, всё готово. Запускаем модель, наводим объектив на мою старенькую CraftDuino и радуемся результату:
На первый взгляд совсем не дурно, но это только на первый взгляд.
Похоже за 23 часа, модель переобучилась, поэтому выдает серьезные ошибки при определении объектов.
Вот наглядная демонстрация:
Как видно, не только ножик, но даже просто черный фон, эта модель определяет как ардуино-подобный контроллер. Возможно, всё потому, что в тренировочных данных были темные картинки с Arduino и его аналогами, на которые модель за 23 часа успела натаскаться.
В итоге пришлось загружать свой компьютер еще на 8 часов и обучать новую модель.
С ней дела обстоят намного лучше.
Вот пример с CraftDuino:
Живой малины у меня под рукой нет. Пришлось печатать картинки. С экрана телефона или монитора тоже можно распознать, но с бумаги было удобней.
Проверим, как модель распознает Arduino nano, которую в свое время DrZugrik для меня впаял в свое мега устройство с датчиками:
Как видите распознает вполне хорошо, однако при очень неудачном ракурсе и при теплом освещении, может некоторые фрагменты распознать, как малину. Но на самом деле кадр с ошибкой было тяжело поймать в объектив.
Теперь проверим, как она классифицирует те объекты на которых не обучалась.
Снова пример с ножом и черным фоном:
В этот раз все работает, как надо.
Предложим нашей модели распознать контроллер Canny 3 tiny, о котором я писал в прошлой статье.
Поскольку наша модель не знает ни о чем, кроме ягоды малины и ардуино-подобных контроллеров, то можно сказать, что модель распознала контроллер Canny вполне успешно.
Правда, как и в случае с Arduino nano, многое зависит от ракурса и освещения.
При теплом свете лампы накаливания и при неудачном ракурсе, контроллер может не только не распознаваться, но даже определиться как малина. Правда, как и в прошлом случае, эти ракурсы еще надо было постараться поймать в объектив.
Ну и последний случай — своеобразный реверанс статье про классификацию изображений в PyTorch. Как и в прошлый раз совместим в одном кадре одноплатный компьютер Raspberry Pi 2 и его логотип. В отличие от прошлой статьи, в которой мы решали задачу классификации и выбирали один наиболее вероятный объект для изображения, в данном случае распознается и логотип и сама «Малина».
Часть IV: заключение
В заключение хочется сказать, что не смотря на то, что по неопытности этот небольшой пример работы с Tensorflow Object Detection API отнял у меня оба выходных и часть понедельника, я ни о чем не жалею. Когда хоть немного разберешся, как этим всем пользоваться становится безумно любопытно. В процессе обучения начинаешь относится к модели, как к живой, следишь за её успехами и неудачами.
Поэтому, рекомендую всем кто с этим не знаком однажды попробовать, распознать что-нибудь свое.
Тем более, как выснилось в процессе, вам даже не нужно покупать настоящую веб-камеру. Дело в том, что во время подготовки статьи я умудрился доломать свою веб-камеру (сломал механизм фокусировки) и уже думал, что придется всё забросить. Но оказалось, что с помощью Droidcam можно использовать смартфон вместо веб-камеры (не сочтите за рекламу). Причем качество съемки получилось сильно лучше, чем у сломавшейся камеры, а это весьма влияло на качество распознавания объектов на изображении.
Кстати поскольку в Anaconda нормальную сборку pycocotools я нашел только для Linux, а переключаться в процессе работы между операционными системами мне было лень, то всю эту статью я подготовил только с использованием oпрограмного обеспечения с открытым исходным кодом. Нашлись аналоги и Word и Photoshop и даже драйвер для принтера. Первый раз в моей жизни случилось такое. Оказалось, что современные версии ОС Linux и прикладных программ могут быть очень удобными, даже для человека более 25 лет использующего ОС от Microsoft.
P.S. Если кто-то знает, как нормально запустить Object Detection API
для Tensorflow версии 2 и выше, отпишитесь пожалуйста в личку или в комментарии.
Всем хорошего дня и крепкого здоровья!

