Микроконтроллер — это интегральная схема, способная выполнять программы. Сегодня на рынке представлено множество таких моделей от самых разных производителей. Цены на эти устройства продолжают падать. Однокристальные чипы находят широкое применение в самых разнообразных сферах: от измерительных приборов до изделий развлечений и всевозможной домашней техники. В отличие от персональных компьютеров микроконтроллер сочетает в одном кристалле функции процессора и периферийных устройств, содержит оперативную память и постоянное запоминающее устройство в для хранения кода и данных, однако обладает значительно мешьшими вычислительными ресурсами. ESP32 — это микроконтроллер, разработанный компанией Espressif Systems. ESP32 представляет собой систему на кристалле с интегрированным Wi-Fi и Bluetooth контроллерами. В серии ESP32 используется ядро Tensilica Xtensa LX6. Платы с ESP32 обладают хорошей вычислительной способностью, развитой периферией и при этом весьма популярны ввиду низкой цены в диапазоне 7$ – 14$: Aliexpress, Amazon.

Данная статья не претендует на роль исчерпывающего руководства, скорее представляет собой сборник источников материала и рекомендаций. Я затрону вопросы, с которыми мне пришлось столкнуться при выборе программных средств для разработки проекта, а также некоторые кейсы практического применения модулей ESP32. В следующей статье я покажу наглядный пример использования ESP32 в качестве котроллера управления для небольшой двухколесной мобильной платформы. А в этом материале мы рассмотрим:
Согласно datasheet модуль содержит:
MCU
Wi-Fi
Bluetooth
Hardware
Certification

Функциональная блок-диаграмма
Подробнее с особенностями микроконтроллера можно ознакомиться в Википедии.
В основе модуля лежит микросхема ESP32-D0WD-V3 *. Встроенный чип разработан с учетом возможности масштабирования и адаптации. Центральный процессор содержит два ядра, которыми можно управлять индивидуально, а тактовая частота ЦП регулируется от 80 МГц до 240 МГц. Чип также имеет сопроцессор с низким энергопотреблением, который можно использовать вместо ЦП для экономии энергии при выполнении задач, не требующих больших вычислительных мощностей, таких как мониторинг состояния пинов. ESP32 объединяет богатый набор периферийных устройств, начиная от емкостных сенсорных датчиков, датчиков Холла, интерфейса SD-карты, Ethernet, высокоскоростного SPI, UART, I²S и I²C.
Техническая документация представлена на официальном ресурсе.
Информацию про распиновку модуля ESP-WROOM-32 можно легко найти на просторах сети. Например здесь
Микроконтроллеры семейства AVR, а затем и платформа Arduino появились задолго до ESP32. Одной из ключевых особенностей Arduino является относительно низкий порог вхождения, позволяющий практически любому человеку создать решение быстро и легко. Платформа сделала важный вклад в open source hardware сообщество и позволила приобщиться к нему огромному числу радиолюбителей. Среду разработки Arduino IDE можно свободно скачать с официального сайта . Не смотря на очевидные ограничения по сравнению с профессиональной средой разработки, Arduino IDE покрывает 90% из того, что требуется достичь для любительских проектов. В сети также имеется достаточное количество статей на тему установки и настройки Arduino IDE для программирования модулей ESP32, например: Arduino core for the ESP32, habr.com, voltiq.ru и randomnerdtutorials.com.
Программируя ESP32 в среде Arduino необходимо учитывать распиновку, как указано на странице arduino-esp32.
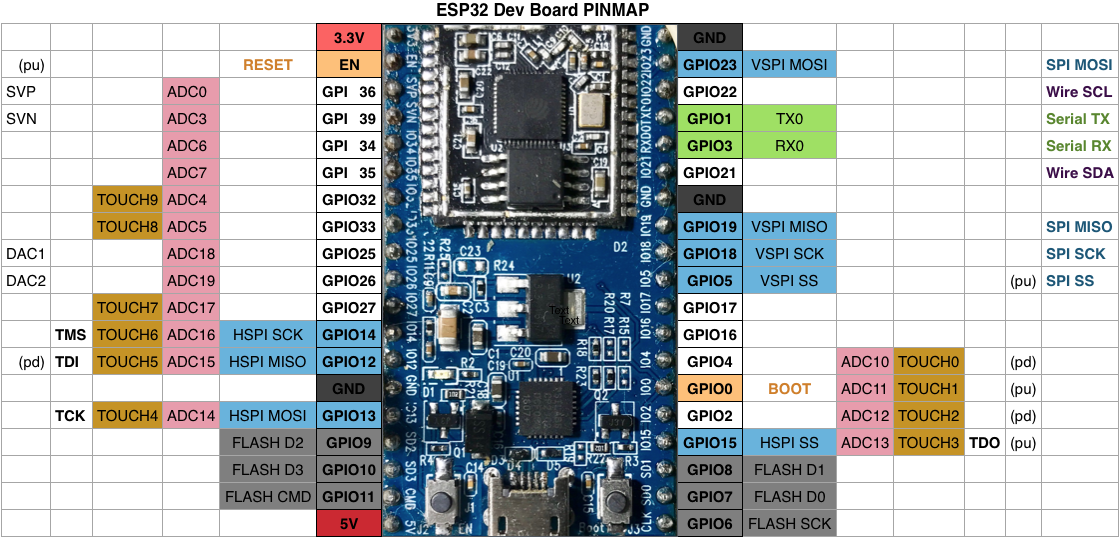
Распиновка модуля ESP32
Основное преимущество данного подхода разработки заключается в быстром вхождении и легкости создания проектов, с помощью тех же принципов и многих библиотек, что и для Arduino. А также использование многих библиотек, как и для Arduino. Еще одной полезной особенностью является возможность совмещать библиотеки и принципы разработки Arduino с оригинальным ESP-IDF фреймворком.
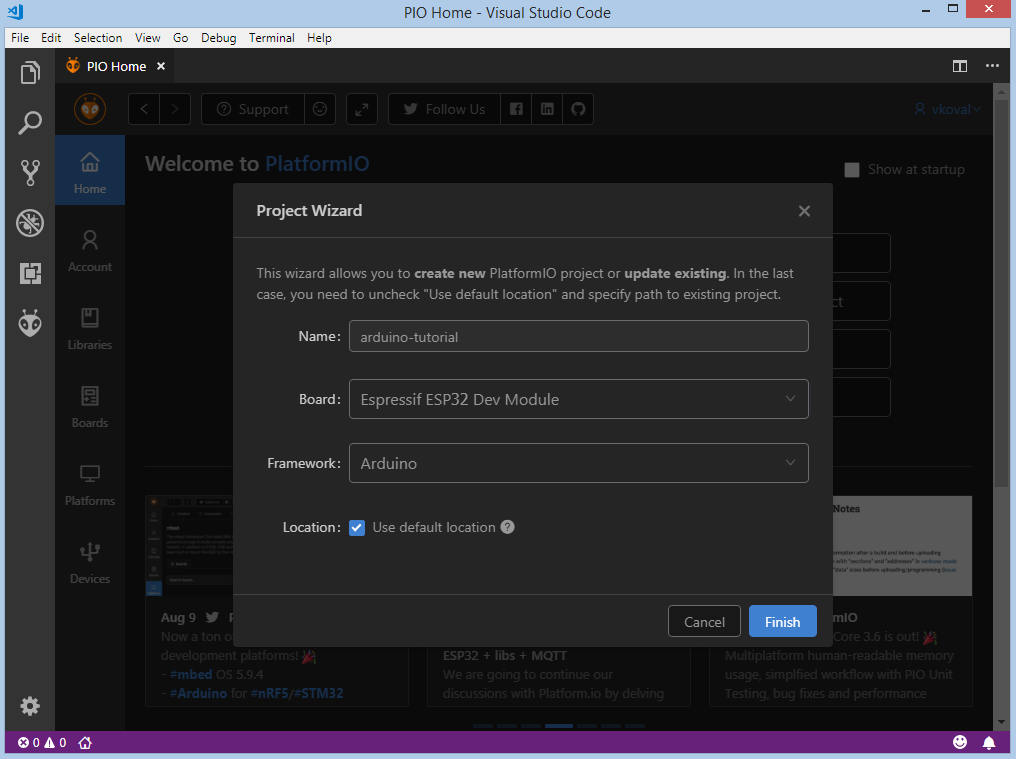
Как сказано на официальном ресурсе платформы: «Cross-platform PlatformIO IDE and Unified Debugger · Static Code Analyzer and Remote Unit Testing. Multi-platform and Multi-architecture Build System · Firmware File Explorer and Memory Inspection» Иными словами PlatformIO – это экосистема для разработки встроенных устройств, поддерживающая множество платформ, включая Arduino и ESP32. В качестве IDE используется Visual Studio Code или Atom. Установка и настройка достаточно простая – после установки редактора кода выбираем PlatformIO из списка плагинов и устанавливаем. В сети есть много материалов на данную тему, начиная от официального источника здесь и здесь, и продолжая статьями с подробными иллюстрациями здесь и здесь.
PlatformIO по сравнению с Arduino IDE обладает всеми качествами современной среды разработки: организация проектов, поддержка плагинов, автодополнение кода и многое другое.
Особенностью разработки на PlatformIO является унифицированная структура проекта для всех платформ
Каждый проект PlatformIO содержит файл конфигурации с именем platformio.ini в корневом каталоге проекта. platformio.ini имеет разделы (каждый из которых обозначен [заголовком]) и пары: «ключ / значение» внутри разделов. Строки, начинающиеся с символа точка с зяпятой «;» игнорируются и могут использоваться для комментариев. Параметры с несколькими значениями можно указать двумя способами:
Следующей фичей разработки для ESP32 является возможность выбора фреймворка: Arduino или ESP-IDF. Выбирая Arduino в качестве фреймворка мы получаем ранее описанные преимущества разработки.
В состав PlatformIO входит удобный инструментарий билда, загрузки и отладки проектов

Для ESP32 компания Espressif разработала фреймворк под названием IoT Development Framework, известный как «ESP-IDF». Его можно найти на Github. Проект содержит очень хорошую документацию и снабжен примерами, которые можно брать за базу. Установка и настройка среды окружения хорошо описана в разделе Get Started. Имеется несколько вариантов установки и работы с фреймворком.
Клонирование проекта из репозитория и ручная установка утилит.
Клонирование проекта из Github
Для Windows установка утилит разработки возможна с помощью инсталлятора или с помощью скриптов для командной строки:
Для PowerShell
Для Linux и macOS
Следующим шагом является настройка переменных окружений среды. Если установка инструментов разработки была выполнена на Windows с помощью инсталлятора, то ярлык на командную консоль добавляется в меню и на рабочий стол, после чего можно открывать командную оболочку и работать с проектами. Альтернативный спрособ запуска командной оболочки для Windows:
или Windows PowerShell:
Linux и macOS:
Следует обратить внимание на пробел между точкой и путем к скрипту
Далее в руководстве рекомендуется добавить алиас на скрипт настройки переменных окружения в пользовательский профиль, если работа производится в системе Linux или macOS. Для этого необходимо скопировать и вставить следующую команду в профиль своей оболочки (.profile, .bashrc, .zprofile, и т.д.):
Вызывая команду get_idf в консоль экспортируются необходимы переменные окружения. В моем случае также необходимо было прописать алиас на запуск виртуального окружения python.
А также добавить esp_va в следующий алиас
Для создание нового проекта с нуля можно склонировать исходники с github.com или скопировать из каталога с примерами esp-idf/examples/get-started/hello_world/.
Информация о структуре проекта, утилитах компиляции, загрузки, настройки и так далее находится здесь.
Проект представляет собой каталог со следующей структурой:
Конфигурация проекта содержится в файле sdkconfig в корневом каталоге. Для изменения настроек необходимо вызвать команду idf.py menuconfig (или idf.py.exe menuconfig в Windows).
В одном проекте обычно создаются два приложения — «project app» (основной исполняемый файл, то есть ваша кастомная прошивка) и «bootloader app» (программа начального загрузчика проекта).
«components» — это модульные части автономного кода, которые компилируются в статические библиотеки (файлы .a) и связаны с приложением. Некоторые из них предоставляются самой ESP-IDF, другие могут быть получены из иных источников.
Утилита командной строки idf.py предоставляет интерфейс для простого управления сборками проекта. Ее расположение в Windows — %userprofile%\.espressif\tools\idf-exe\1.0.1\idf.py.exe. Она управляет следующими инструментами:
Каждый проект имеет один файл CMakeLists.txt верхнего уровня, который содержит параметры сборки для всего проекта. Минимальная конфигурация файла включает следующие необходимые строчки:
Проект ESP-IDF можно рассматривать как совокупность компонентов, в котором каталог main является главным комонентом, запускающим код. Поэтому в данной директории также содержится файл CMakeLists.txt. Чаще всего его структура подобна:
В ней указывается, что исходный файл main.c необходимо зарегистрировать для компонента, а файлы заголовков содержатся в текущем каталоге. При необходимости можно переименовать каталог main, установив EXTRA_COMPONENT_DIRS в прокте CMakeLists.txt. Подробно можно ознакомиться здесь.
Помимо этого в каталоге находится исходный main.с (имя может быть любое) файл с точкой входа – функцией void app_main(void).
Кастомые компоненты создатся в каталоге components. Подробнее процесс описан в разделе Component Requirements.
Подключение модуля ESP32 к компьютеру в большинстве случаев производится с помощью USB-кабеля подобно платам Arduino за счет имеющегося бутлоадера. Подробнее процесс описан здесь. Едиственное, что необходимо – это наличие драйвера конвертора USB to UART в системе, который можно скачать по ссылкам из приведенного источника. После установки драйвера, необходимо определить номер COM-порта в системе для загрузки скомпилированной прошивки в модуль.
Конфигурирование проекта.
В большинстве случаев подходят настройки по умолчанию. Но для вызова консольного интерфейса меню необходимо перейти в каталог проекта и в командной строке набрать:
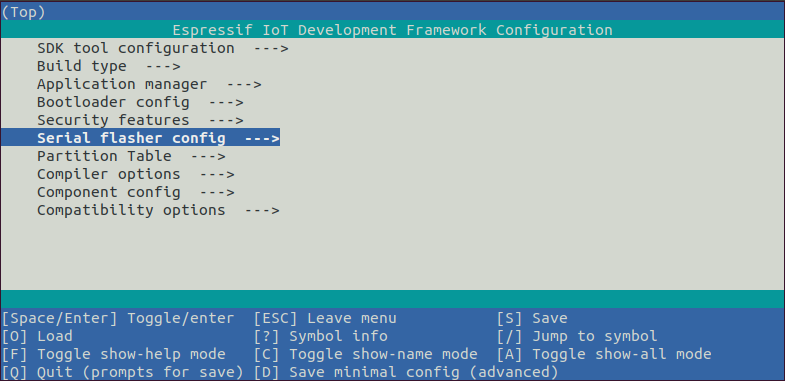
Меню с конфигурационными настройками
После вызова этой команды файл sdkconfig будет создан, если его ранее не было или он заново сконфигурирован. В более ранних обучающих материалах можно встретить команды make menuconfig, которые являются устаревшими.
Добавление кастомных настроек в файл sdkconfig возможно вручную, например:
Но предпочтительным является способ с помощью дополнительного конфигурационного файла Kconfig.projbuild, который необходимо располагать в каталоге с компонентом. Содержимое файла может быть следующим:
После вызова команды idf.py menuconfig в файле sdkconfig автоматически добавиться дополнительный раздел. Вызов команды idf.py menuconfig возможен и в проекте PlatformIO, однако, нужно учитывать факт отличия структуры проекта PlatformIO от классического ESP-IDF, из-за чего файл sdkconfig может заново сгенерироваться и потерять кастомные настройки. Тут возможны вышеупомянутые варианты: правка файла руками, временное переименование каталога src в main или настройка файла CMakeLists.txt
Компиляция и загрузка проекта.
Для билда проекта необходимо набрать команду
Эта команда скомпилирует приложение и все компоненты ESP-IDF, а затем сгенерирует загрузчик, таблицу разделов и двоичные файлы приложения.
Следует учитывать, что первоначальный процесс компиляции даже простого проекта занимает время, так как, в отличие от Arduino фреймворка компилируются многие дополнительные модули ESP-IDF. Дальнейшее изменение исходников приводит только к компиляции этих же файлов. Исключение составляет изменение конфигурации.
Для загрузки скомпилированных двоичных файлов (bootloader.bin, partition-table.bin и hello-world.bin) на плату ESP32 необходимо запустить команду
где PORT мы заменяем на тот, что нам нужно (COM1, /dev/ttyUSB1), а также опционально можем изменить скорость загрузки, указав необходимое значение для BAUD
Для отслеживания загруженной программы можно использовать любую утилиту мониторинга com-порта, такие как HTerm, CoolTerm, или использовать утилиту мониторинга IDF Monitor, для запуска которой необходимо ввести команду
Документация по установке и настройке плагина находится здесь
Предустановки для использования:
Плагин довольно неплохо интегрирован в среду разработки и, автоматизирует львиную долю функционала. Но, к сожалению, не без ложки дегтя. В Eclipse версиях позже 2019-09 в ESP-IDF проектах в Windows до сих пор присутствует баг с индексированием исходных файлов.
Кроме этого наблюдаются и другие сбои, когда проект просто не билдится по непонятным причинам. Помогает только закрытие проекта и перезагрузка Eclipse.
И последний, на мой взгляд, самый интересный вариант – это официальный плагин для Visual Studio Code.
Как и PlatformIO, он легко устанавливается из раздела расширений. Установка и настройка ESP-IDF фреймворка в этом расширении представлена в качестве меню onboarding, о чем также говорится в описании. Загрузка и установка всех компонентов происходит автоматически в процессе прохождения этапов меню. Можно привести все скрины процесса, но они интуитивно понятны, и практически не требуют пояснения. В пользу PlatformIO можно отметить более удобный инструментарий билда, загрузки и мониторинга проекта. В отличие от этого ESP-IDF плагин управляется с помощью меню команд, которое можно вызвать с помощью клавиши F1 или сочетания клавиш, описанных в мануале.
Первоначальная настройка плагина
Преимущество использования плагина состоит в том, что соблюдается классическая структура проекта, нет необходимости как-то еще «шаманить» с настройками (в PlatformIO такая необходимость возникает). Есть один нюанс: если мы хотим открыть ранее созданный проект в Visual studio code с ESP-IDF плагином, то нам всего лишь необходимо скопировать в корень с проектом каталог .vscode, который можно получить, сгенерировав хотя бы один раз шаблонный проект с помощью ESP-IDF плагина.
Меню команд
Согласно Википедии FreeRTOS — многозадачная операционная система реального времени (ОСРВ) для встраиваемых систем. FreeRTOS обеспечивает мультизадачность за счет совместного использования процессорного времени всеми потоками или, в терминологии ОС, задачами (task). На мой взгляд, наиболее полное и внятное руководство по FreeRTOS на русском находится здесь. На языке оригинала мануалы можно изучить из официального источника. Я лишь приведу рисунок состояния задач.
FreeRTOS была портирована на широкий спектр аппаратных платформ, включая процессоры Xtensa, используемые в ESP32. Подробнее можно ознакомиться в документации.
GPIO или универсальный ввод/вывод – это возможность дискретного управления пина сигналом «1» или «0».
Как видно из самого названия, такие пины имеют два рабочих режима: ввод или вывод. В первом случае мы читаем значение, во втором – записываем. Еще одним важным фактором при работе с GPIO является уровень напряжения. ESP32 — это устройство с напряжением 3,3 В. Поэтому следует быть осторожным при работе с другими устройствами, которые имеют напряжение 5 В и выше. Также важно понимать, что максимальный ток, которым можно нагружать вывод GPIO, составляет 12 мА. Для использования функций GPIO, предоставляемых ESP-IDF, нам необходимо подключить заголовок driver/gpio.h. Затем можно вызвать gpio_pad_select_gpio(), чтобы указать функцию данного вывода. На ESP32 доступно 34 различных GPIO. Они обозначены как:
Следующая нумерация не входит в число пинов 20, 24, 28, 29, 30 и 31.
Таблицу с распиновкой можно посмотреть здесь.
Следует обратить внимание, что пины GPIO_NUM_34 — GPIO_NUM_39 используют только режим ввода. Их нельзя использовать для вывода сигнала. Кроме того, контакты 6, 7, 8, 9, 10 и 11 используются для взаимодействия с внешней флеш-картой по SPI. Не рекомендуется их использовать для других целей, но если очень хочется, то можно. Тип данных gpio_num_t — это перечисление со значениями, соответствующими номерам пинов. Рекомендуется использовать эти значения, а не числа. Направление пина устанавливается с помощью функции gpio_set_direction (). Например, для установки пина как выход:
Для установки пина в качестве входа:
Если мы настроили GPIO как выход, то можем установить его значение равным 1 или 0, вызывая gpio_set_level ().
Следующий пример переключает GPIO раз в секунду:
В качестве альтернативы настройке всех атрибутов отдельных пинов мы можем установить свойства одного или нескольких контактов с помощью вызова функции gpio_config (). Она принимает в качестве входных данных структуру gpio_config_t и устанавливает направление, pull up, pull down и настройки прерывания для всех выводов, представленных в битовой маске.
Например:
Pull up и pull down настройки
Обычно считается, что входной пин GPIO имеет сигнал высокого или низкого уровня. Это означает, что он подключен к источнику питания или к земле. Однако, если пин не подключен ни к чему, то он находится в «плавающем» (floating) состоянии. Часто необходимо установить начальный уровень неподключенного пина как высокий или низкий. В таком случае производится аппаратная (подключение c помощью резисторов) или программная подтяжка вывода соответственно к +V – pull up или к 0 – pull down. В ESP32 SDK мы можем определить GPIO как pull up или pull down с помощью функции gpio_set_pull_mode (). Эта функция принимает в качестве входных данных номер контакта, который мы хотим установить, и режим подтяжки, связанный с этим контактом.
Например:
GPIO обработка прерывания
Чтобы обнаружить изменение входного сигнала на пине, мы можем периодически опрашивать его состояние, однако, это не лучшее решение по ряду причин. Во-первых, мы должны циклически делать проверку, тратя процессорное время. Во-вторых, в момент опроса состояние пина может быть уже не актуальное за счет задержки и есть риск пропустить входные сигналы. Решением этих проблем является прерывание. Прерывание похоже на дверной звонок: без него нам придется периодически проверять, есть ли кто-нибудь у двери. В исходном коде мы можем определить функцию обратного вызова прерывания, которая будет вызываться, когда вывод изменяет значение своего сигнала. Мы также можем определить, что является причиной вызова обработчика, установив следующие параметры:
Обработчик прерывания может быть отмечен для загрузки в ОЗУ во время компиляции. По умолчанию сгенерированный код находится во флэш-памяти. Если предварительно пометить его как IRAM_ATTR, он будет готов к немедленному выполнению из оперативной памяти.

Кто работал с микроконтроллерами, знает, что обработка входных сигналов от кнопок сопровождается дребезгом контактов. Что может интерпретироваться как серия переходов, и следовательно, серия событий обработчика прерывания. Для этого мы должны внести в код обработку дребезга контактов. Для этого нам надо считать исходное событие, дождаться пока вибрации не утихнут, а затем выполнить повторную выборку входного состояния.
Следующий пример демонстрирует обработку прерывания входных сигналов. Настоятельно рекомендую ознакомится с управлением очередями во FreeRTOS для дальнейшего понимания кода, если вы еще с этим не знакомы. В примере показаны две задачи:
Выше также установлен программный таймер xTimer. Он не является обязательным для данного случая, скорее служит примером асинхронной задержки.
Антидребезг производится с помощью функции timeval_durationBeforeNow, которая проверяет, длится ли нажатие более 100 мсек. Есть и другие программные шаблоны против дребезга, но смысл примерно тот же. В составе ESP-IDF также имеется пример работы GPIO.
Модуль PCNT (счетчик импульсов) предназначен для подсчета количества нарастающих и/или спадающих фронтов входного сигнала. Каждый блок модуля имеет 16-битный регистр со знаком и два канала, которые можно настроить для увеличения или уменьшения значения счетчика. Каждый канал имеет входной сигнал, который фиксирует изменение сигнала, а также вход управления, который можно использовать для включения или отключения счета. Входы имеют дополнительные фильтры, которые можно использовать для устранения нежелательных выбросов сигнала.
Счетчик PCNT имеет восемь независимых счетных единиц (units), пронумерованных от 0 до 7. В API они указаны с помощью pcnt_unit_t. Каждый модуль имеет два независимых канала, пронумерованных 0 и 1 и указанных с помощью pcnt_channel_t.
Конфигурация предоставляется отдельно для каждого канала устройства с помощью pcnt_config_t и охватывает:
Затем настройка конкретного канала выполняется путем вызова функции pcnt_unit_config() с указанной выше конфигурационной структурой pcnt_config_t в качестве входного параметра.
Чтобы отключить импульс или управляющий вход в конфигурации, нужно указать PCNT_PIN_NOT_USED вместо номера GPIO.
После выполнения настройки с помощью pcnt_unit_config() счетчик сразу же начинает работать. Накопленное значение счетчика можно проверить, вызвав pcnt_get_counter_value().
Следующие функции позволяют управлять работой счетчика: pcnt_counter_pause(), pcnt_counter_resume() и pcnt_counter_clear().
Также возможно динамически изменять ранее установленные режимы счетчика с помощью pcnt_unit_config(), вызывая pcnt_set_mode().
При желании контакт импульсного входа и контакт входа управления можно изменить на лету с помощью pcnt_set_pin().
Модуль PCNT имеет фильтры на каждом из импульсных и управляющих входов, добавляя возможность игнорировать короткие выбросы в сигналах. Длина игнорируемых импульсов предоставляется в тактовых циклах APB_CLK с помощью вызова pcnt_set_filter_value(). Текущие настройки фильтра можно проверить с помощью pcnt_get_filter_value(). Цикл APB_CLK работает на частоте 80 МГц.
Фильтр запускается/приостанавливается вызовом pcnt_filter_enable()/pcnt_filter_disable().
Следующие события, определенные в pcnt_evt_type_t, могут вызвать прерывание. Событие происходит, когда счетчик импульсов достигает определенных значений:
Чтобы зарегистрировать, включить или отключить прерывание для указанных выше событий, необходимо вызвать pcnt_isr_register(), pcnt_intr_enable() и pcnt_intr_disable(). Чтобы включить или отключить события при достижении пороговых значений, также потребуется вызвать функции pcnt_event_enable() и pcnt_event_disable().
Чтобы проверить, какие пороговые значения установлены на данный момент, нужно использовать функцию pcnt_get_event_value().
Пример из ESP-IDF представлен здесь.
Я использовал счетчик PCNT для вычисления скорости вращения колеса. Для этого необходимо считать количество импульсов на оборот, после чего обнулять счетчик.
Информация о модуле представлена здесь.
В сети имеется много статей на тему ШИМ, особенно если искать применительно к Arduino.
Википедия дает короткое и емкое определение: «Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью методом пульсирующего включения и выключения прибора». Принцип регулирования с помощью ШИМ – изменение ширины импульсов при постоянной амплитуде и частоте сигнала.
Частота ШИМ Arduino 488,28 Гц., разрешение — 8 разрядов (0…255), и имеется возможность использования шести аппаратных выводов: 3, 5, 6, 9, 10, 11. Однако, используя настройки регистров микроконтроллера AVR, можно добиться и других значений частоты ШИМ.
Микроконтроллер ESP32 имеет в своем арсенале отдельный модуль MCPWM, а точнее два модуля, каждый из которых имеет три пары ШИМ выводов:
Далее в документации выходы отдельного блока помечены как PWMxA / PWMxB.
Более подробная блок-схема блока MCPWM представлена ниже. Каждая пара A/B может синхронизироваться любым из трех таймеров: Timer 0, 1 и 2. Один и тот же таймер может использоваться для синхронизации более чем одной пары выходов ШИМ. Каждый блок также может собирать входные данные (например, сигналы синхронизации), обнаруживать сигналы тревог (например, перегрузка по току или перенапряжение двигателя), а также получать обратную связь с помощью сигналов захвата (например, на положение ротора).
Объем конфигурации зависит от типа двигателя и, в частности, от того, сколько выходов и входов требуется, и какой будет последовательность сигналов для управления двигателем.
В нашем случае опишем простую конфигурацию для управления щеточным двигателем постоянного тока, который использует только некоторые из доступных ресурсов MCPWM. Пример схемы показан ниже. Он включает в себя H-мост для переключения поляризации напряжения, подаваемого на двигатель (M), и обеспечения достаточного тока для его управления.
Конфигурация включает следующие шаги:
Существуют такие способы управления ШИМ:
Пример кода для коллекторного двигателя находится здесь
В своем проекте я практически использовал код из примера, немного подкорректировав его, и добавил управление вторым двигателем. Для независимого управления ШИМ-каналами необходимо каждый из них настроить отдельным таймером, например MCPWM_TIMER_0 и CPWM_TIMER_1:
Тема протокола Wi-FI достаточно обширная. Для описания протокола понадобится серия отдельных статей. В официальном руководстве можно ознакомиться с разделом Wi-Fi driver. Описание программного API находится здесь. Примеры кода можно посмотреть здесь.
Библиотеки Wi-Fi обеспечивают поддержку для настройки и мониторинга сетевых функций ESP32 Wi-Fi. Доступны такие конфигурации:
Ознакомиться с темой можно здесь или здесь. Руководство ESP-IDF с примерами находится здесь.
Для настройки MQTT в коде сначала необходимо подключиться к сети Wi-Fi. После чего установить подключение к брокеру. Обработка сообщения производится в коллбеке, в качестве параметра которого выступает esp_mqtt_event_handle_t event. Если тип события равен MQTT_EVENT_DATA, значит можно парсить топик и данные. Можно настроить различное поведение в результате успешного подключения, отключения и подписки на топики.
На этом я завершаю свое повествование об использовании модуля ESP32. В статье были рассмотрены примеры на ESP-IDF как фреймворка максимально использующего ресурсы модуля. Программирование с использованием других платформ, таких как JavaScript, MicroPython, Lua можно найти на соответствующих ресурсах. В следующей статье, как уже упоминалось, я приведу практический пример использования микроконтроллера, а также сравню программный подход Arduino и ESP-IDF.
Данная статья не претендует на роль исчерпывающего руководства, скорее представляет собой сборник источников материала и рекомендаций. Я затрону вопросы, с которыми мне пришлось столкнуться при выборе программных средств для разработки проекта, а также некоторые кейсы практического применения модулей ESP32. В следующей статье я покажу наглядный пример использования ESP32 в качестве котроллера управления для небольшой двухколесной мобильной платформы. А в этом материале мы рассмотрим:
- Выбор среды разработки;
- Настройку рабочего окружения, компиляцию и загрузку проекта ESP-IDF;
- Обработку сигналов ввода/вывода GPIO;
- Широтно-импульсную модуляцию с использованием модуля MCPWM;
- Аппартный счетчик PCNT;
- Подключение к WI-Fi и MQTT.
Обзор модуля ESP32-WROOM-32E
Согласно datasheet модуль содержит:
MCU
- ESP32-D0WD-V3 embedded, Xtensa dual-core 32-bit LX6 microprocessor, up to 240 MHz
- 448 KB ROM for booting and core functions
- 520 KB SRAM for data and instructions
- 16 KB SRAM in RTC
Wi-Fi
- 802.11b/g/n
- Bit rate: 802.11n up to 150 Mbps
- A-MPDU and A-MSDU aggregation
- 0.4 µs guard interval support
- Center frequency range of operating channel: 2412 ~ 2484 MHz
Bluetooth
- Bluetooth V4.2 BR/EDR and Bluetooth LE specification
- Class-1, class-2 and class-3 transmitter
- AFH
- CVSD and SBC
Hardware
- Interfaces: SD card, UART, SPI, SDIO, I 2 C, LED PWM, Motor PWM, I 2 S, IR, pulse counter, GPIO, capacitive touch sensor, ADC, DAC
- 40 MHz crystal oscillator
- 4 MB SPI flash
- Operating voltage/Power supply: 3.0 ~ 3.6 V
- Operating temperature range: –40 ~ 85 °C
- Dimensions: See Table 1
Certification
- Bluetooth certification: BQB
- RF certification: FCC/CE-RED/SRRC
- Green certification: REACH/RoHS
Функциональная блок-диаграмма
Подробнее с особенностями микроконтроллера можно ознакомиться в Википедии.
В основе модуля лежит микросхема ESP32-D0WD-V3 *. Встроенный чип разработан с учетом возможности масштабирования и адаптации. Центральный процессор содержит два ядра, которыми можно управлять индивидуально, а тактовая частота ЦП регулируется от 80 МГц до 240 МГц. Чип также имеет сопроцессор с низким энергопотреблением, который можно использовать вместо ЦП для экономии энергии при выполнении задач, не требующих больших вычислительных мощностей, таких как мониторинг состояния пинов. ESP32 объединяет богатый набор периферийных устройств, начиная от емкостных сенсорных датчиков, датчиков Холла, интерфейса SD-карты, Ethernet, высокоскоростного SPI, UART, I²S и I²C.
Техническая документация представлена на официальном ресурсе.
Информацию про распиновку модуля ESP-WROOM-32 можно легко найти на просторах сети. Например здесь
Выбор среды разработки
Arduino IDE
Микроконтроллеры семейства AVR, а затем и платформа Arduino появились задолго до ESP32. Одной из ключевых особенностей Arduino является относительно низкий порог вхождения, позволяющий практически любому человеку создать решение быстро и легко. Платформа сделала важный вклад в open source hardware сообщество и позволила приобщиться к нему огромному числу радиолюбителей. Среду разработки Arduino IDE можно свободно скачать с официального сайта . Не смотря на очевидные ограничения по сравнению с профессиональной средой разработки, Arduino IDE покрывает 90% из того, что требуется достичь для любительских проектов. В сети также имеется достаточное количество статей на тему установки и настройки Arduino IDE для программирования модулей ESP32, например: Arduino core for the ESP32, habr.com, voltiq.ru и randomnerdtutorials.com.
Программируя ESP32 в среде Arduino необходимо учитывать распиновку, как указано на странице arduino-esp32.
Распиновка модуля ESP32
Основное преимущество данного подхода разработки заключается в быстром вхождении и легкости создания проектов, с помощью тех же принципов и многих библиотек, что и для Arduino. А также использование многих библиотек, как и для Arduino. Еще одной полезной особенностью является возможность совмещать библиотеки и принципы разработки Arduino с оригинальным ESP-IDF фреймворком.
PlatformIO
Как сказано на официальном ресурсе платформы: «Cross-platform PlatformIO IDE and Unified Debugger · Static Code Analyzer and Remote Unit Testing. Multi-platform and Multi-architecture Build System · Firmware File Explorer and Memory Inspection» Иными словами PlatformIO – это экосистема для разработки встроенных устройств, поддерживающая множество платформ, включая Arduino и ESP32. В качестве IDE используется Visual Studio Code или Atom. Установка и настройка достаточно простая – после установки редактора кода выбираем PlatformIO из списка плагинов и устанавливаем. В сети есть много материалов на данную тему, начиная от официального источника здесь и здесь, и продолжая статьями с подробными иллюстрациями здесь и здесь.
PlatformIO по сравнению с Arduino IDE обладает всеми качествами современной среды разработки: организация проектов, поддержка плагинов, автодополнение кода и многое другое.
Особенностью разработки на PlatformIO является унифицированная структура проекта для всех платформ
project_dir ├── lib │ └── README ├── platformio.ini └── src └── main.cpp
Каждый проект PlatformIO содержит файл конфигурации с именем platformio.ini в корневом каталоге проекта. platformio.ini имеет разделы (каждый из которых обозначен [заголовком]) и пары: «ключ / значение» внутри разделов. Строки, начинающиеся с символа точка с зяпятой «;» игнорируются и могут использоваться для комментариев. Параметры с несколькими значениями можно указать двумя способами:
- разделение значения с помощью «,» (запятая + пробел);
- многострочный формат, где каждая новая строка начинается как минимум с двух пробелов.
Следующей фичей разработки для ESP32 является возможность выбора фреймворка: Arduino или ESP-IDF. Выбирая Arduino в качестве фреймворка мы получаем ранее описанные преимущества разработки.
В состав PlatformIO входит удобный инструментарий билда, загрузки и отладки проектов
Espressif IoT Development framework
Для ESP32 компания Espressif разработала фреймворк под названием IoT Development Framework, известный как «ESP-IDF». Его можно найти на Github. Проект содержит очень хорошую документацию и снабжен примерами, которые можно брать за базу. Установка и настройка среды окружения хорошо описана в разделе Get Started. Имеется несколько вариантов установки и работы с фреймворком.
Клонирование проекта из репозитория и ручная установка утилит.
Клонирование проекта из Github
mkdir -p ~/esp cd ~/esp git clone --recursive https://github.com/espressif/esp-idf.git
Для Windows установка утилит разработки возможна с помощью инсталлятора или с помощью скриптов для командной строки:
cd %userprofile%\esp\esp-idf install.bat
Для PowerShell
cd ~/esp/esp-idf ./install.ps1
Для Linux и macOS
cd ~/esp/esp-idf ./install.sh
Следующим шагом является настройка переменных окружений среды. Если установка инструментов разработки была выполнена на Windows с помощью инсталлятора, то ярлык на командную консоль добавляется в меню и на рабочий стол, после чего можно открывать командную оболочку и работать с проектами. Альтернативный спрособ запуска командной оболочки для Windows:
%userprofile%\esp\esp-idf\export.bat
или Windows PowerShell:
.$HOME/esp/esp-idf/export.ps1
Linux и macOS:
. $HOME/esp/esp-idf/export.sh
Следует обратить внимание на пробел между точкой и путем к скрипту
Далее в руководстве рекомендуется добавить алиас на скрипт настройки переменных окружения в пользовательский профиль, если работа производится в системе Linux или macOS. Для этого необходимо скопировать и вставить следующую команду в профиль своей оболочки (.profile, .bashrc, .zprofile, и т.д.):
alias get_idf='. $HOME/esp/esp-idf/export.sh'
Вызывая команду get_idf в консоль экспортируются необходимы переменные окружения. В моем случае также необходимо было прописать алиас на запуск виртуального окружения python.
alias esp_va=’source $HOME/.espressif/python_env/idf4.2_py2.7_env/bin/activate’
А также добавить esp_va в следующий алиас
alias get_idf='esp_ve && . $HOME/esp/esp-idf/export.sh'
Для создание нового проекта с нуля можно склонировать исходники с github.com или скопировать из каталога с примерами esp-idf/examples/get-started/hello_world/.
Информация о структуре проекта, утилитах компиляции, загрузки, настройки и так далее находится здесь.
Проект представляет собой каталог со следующей структурой:
- myProject/ - CMakeLists.txt - sdkconfig - components/ - component1/ - CMakeLists.txt - Kconfig - src1.c - component2/ - CMakeLists.txt - Kconfig - src1.c - include/ - component2.h - main/ - CMakeLists.txt - src1.c - src2.c - build/
Конфигурация проекта содержится в файле sdkconfig в корневом каталоге. Для изменения настроек необходимо вызвать команду idf.py menuconfig (или idf.py.exe menuconfig в Windows).
В одном проекте обычно создаются два приложения — «project app» (основной исполняемый файл, то есть ваша кастомная прошивка) и «bootloader app» (программа начального загрузчика проекта).
«components» — это модульные части автономного кода, которые компилируются в статические библиотеки (файлы .a) и связаны с приложением. Некоторые из них предоставляются самой ESP-IDF, другие могут быть получены из иных источников.
Утилита командной строки idf.py предоставляет интерфейс для простого управления сборками проекта. Ее расположение в Windows — %userprofile%\.espressif\tools\idf-exe\1.0.1\idf.py.exe. Она управляет следующими инструментами:
- CMake — настраивает проект для сборки
- Консольный сборщик проекта: Ninja, либо GNU Make)
- esptool.py — для прошивки модулей.
Каждый проект имеет один файл CMakeLists.txt верхнего уровня, который содержит параметры сборки для всего проекта. Минимальная конфигурация файла включает следующие необходимые строчки:
cmake_minimum_required(VERSION 3.5) include($ENV{IDF_PATH}/tools/cmake/project.cmake) project(myProject)
Проект ESP-IDF можно рассматривать как совокупность компонентов, в котором каталог main является главным комонентом, запускающим код. Поэтому в данной директории также содержится файл CMakeLists.txt. Чаще всего его структура подобна:
idf_component_register(SRCS "main.c" INCLUDE_DIRS ".")
В ней указывается, что исходный файл main.c необходимо зарегистрировать для компонента, а файлы заголовков содержатся в текущем каталоге. При необходимости можно переименовать каталог main, установив EXTRA_COMPONENT_DIRS в прокте CMakeLists.txt. Подробно можно ознакомиться здесь.
Помимо этого в каталоге находится исходный main.с (имя может быть любое) файл с точкой входа – функцией void app_main(void).
Кастомые компоненты создатся в каталоге components. Подробнее процесс описан в разделе Component Requirements.
Подключение модуля ESP32 к компьютеру в большинстве случаев производится с помощью USB-кабеля подобно платам Arduino за счет имеющегося бутлоадера. Подробнее процесс описан здесь. Едиственное, что необходимо – это наличие драйвера конвертора USB to UART в системе, который можно скачать по ссылкам из приведенного источника. После установки драйвера, необходимо определить номер COM-порта в системе для загрузки скомпилированной прошивки в модуль.
Конфигурирование проекта.
В большинстве случаев подходят настройки по умолчанию. Но для вызова консольного интерфейса меню необходимо перейти в каталог проекта и в командной строке набрать:
idf.py menuconfig
Меню с конфигурационными настройками
После вызова этой команды файл sdkconfig будет создан, если его ранее не было или он заново сконфигурирован. В более ранних обучающих материалах можно встретить команды make menuconfig, которые являются устаревшими.
Добавление кастомных настроек в файл sdkconfig возможно вручную, например:
# # WiFi Settings кастомное меню # CONFIG_ESP_HOST_NAME="имя точки" CONFIG_ESP_WIFI_SSID="название точки доступа" CONFIG_ESP_WIFI_PASSWORD="пароль"
Но предпочтительным является способ с помощью дополнительного конфигурационного файла Kconfig.projbuild, который необходимо располагать в каталоге с компонентом. Содержимое файла может быть следующим:
# put here your custom config value menu "Example Configuration" config ESP_WIFI_SSID string "Keenetic" default "myssid" help SSID (network name) for the example to connect to. config ESP_WIFI_PASSWORD string "password" default "mypassword" help WiFi password (WPA or WPA2) for the example to use. endmenu
После вызова команды idf.py menuconfig в файле sdkconfig автоматически добавиться дополнительный раздел. Вызов команды idf.py menuconfig возможен и в проекте PlatformIO, однако, нужно учитывать факт отличия структуры проекта PlatformIO от классического ESP-IDF, из-за чего файл sdkconfig может заново сгенерироваться и потерять кастомные настройки. Тут возможны вышеупомянутые варианты: правка файла руками, временное переименование каталога src в main или настройка файла CMakeLists.txt
Компиляция и загрузка проекта.
Для билда проекта необходимо набрать команду
idf.py build
Эта команда скомпилирует приложение и все компоненты ESP-IDF, а затем сгенерирует загрузчик, таблицу разделов и двоичные файлы приложения.
$ idf.py build Running cmake in directory /path/to/hello_world/build Executing "cmake -G Ninja --warn-uninitialized /path/to/hello_world"... Warn about uninitialized values. -- Found Git: /usr/bin/git (found version "2.17.0") -- Building empty aws_iot component due to configuration -- Component names: ... -- Component paths: ... ... (more lines of build system output) [527/527] Generating hello-world.bin esptool.py v2.3.1 Project build complete. To flash, run this command: ../../../components/esptool_py/esptool/esptool.py -p (PORT) -b 921600 write_flash --flash_mode dio --flash_size detect --flash_freq 40m 0x10000 build/hello-world.bin build 0x1000 build/bootloader/bootloader.bin 0x8000 build/partition_table/partition-table.bin or run 'idf.py -p PORT flash'
Следует учитывать, что первоначальный процесс компиляции даже простого проекта занимает время, так как, в отличие от Arduino фреймворка компилируются многие дополнительные модули ESP-IDF. Дальнейшее изменение исходников приводит только к компиляции этих же файлов. Исключение составляет изменение конфигурации.
Для загрузки скомпилированных двоичных файлов (bootloader.bin, partition-table.bin и hello-world.bin) на плату ESP32 необходимо запустить команду
idf.py -p PORT [-b BAUD] flash
где PORT мы заменяем на тот, что нам нужно (COM1, /dev/ttyUSB1), а также опционально можем изменить скорость загрузки, указав необходимое значение для BAUD
Для отслеживания загруженной программы можно использовать любую утилиту мониторинга com-порта, такие как HTerm, CoolTerm, или использовать утилиту мониторинга IDF Monitor, для запуска которой необходимо ввести команду
idf.py -p PORT monitor
ESP-IDF Eclipse Plugin
Документация по установке и настройке плагина находится здесь
Предустановки для использования:
- Java 11 and above; (хотя и на java 8 работает, возможно из-за этого глюки);
- Python 3.5 and above;
- Eclipse 2020-06 CDT;
- Git;
- ESP-IDF 4.0 and above;
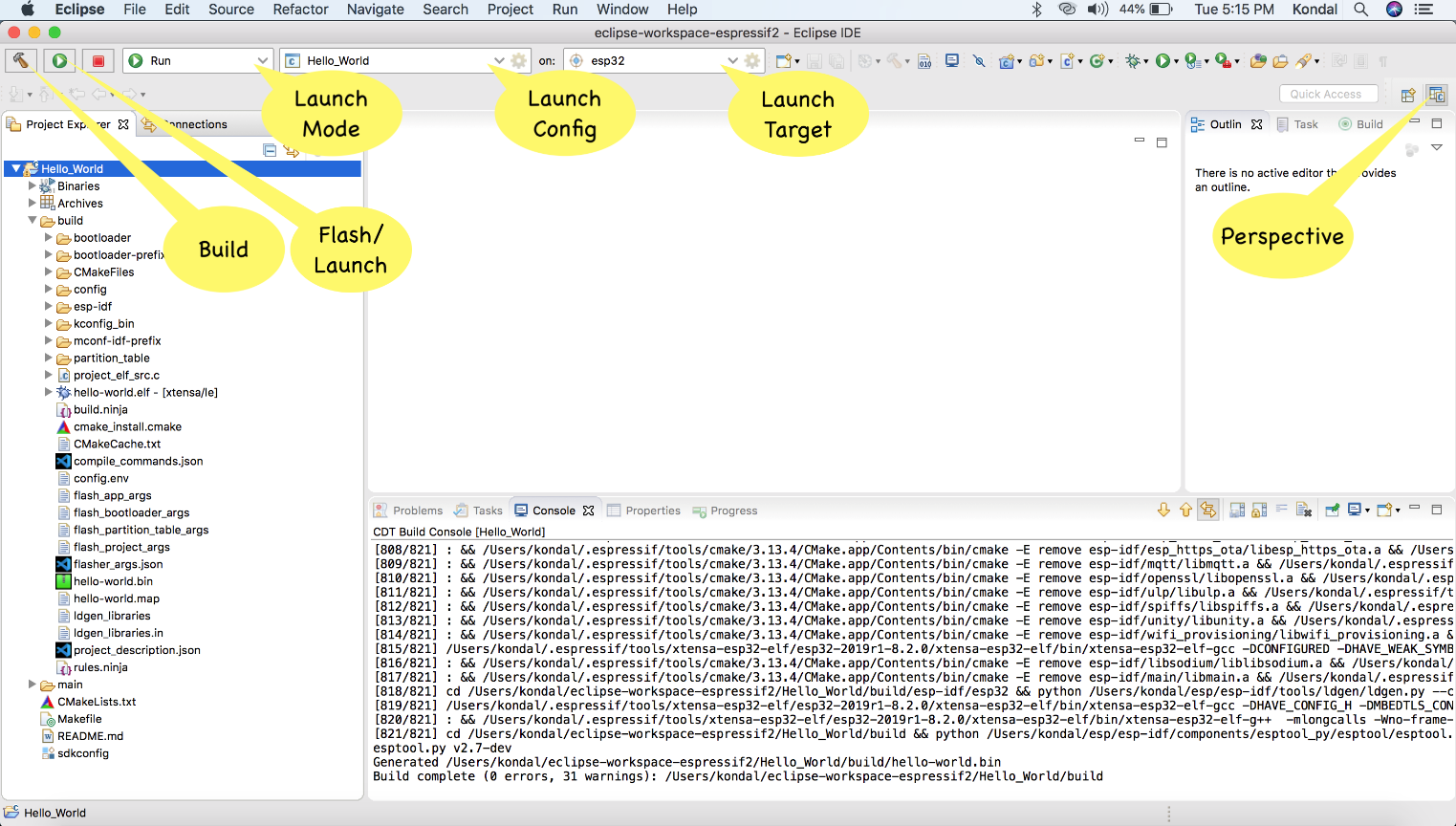
Плагин довольно неплохо интегрирован в среду разработки и, автоматизирует львиную долю функционала. Но, к сожалению, не без ложки дегтя. В Eclipse версиях позже 2019-09 в ESP-IDF проектах в Windows до сих пор присутствует баг с индексированием исходных файлов.
Кроме этого наблюдаются и другие сбои, когда проект просто не билдится по непонятным причинам. Помогает только закрытие проекта и перезагрузка Eclipse.
ESP-IDF Visual Studio Code Extension
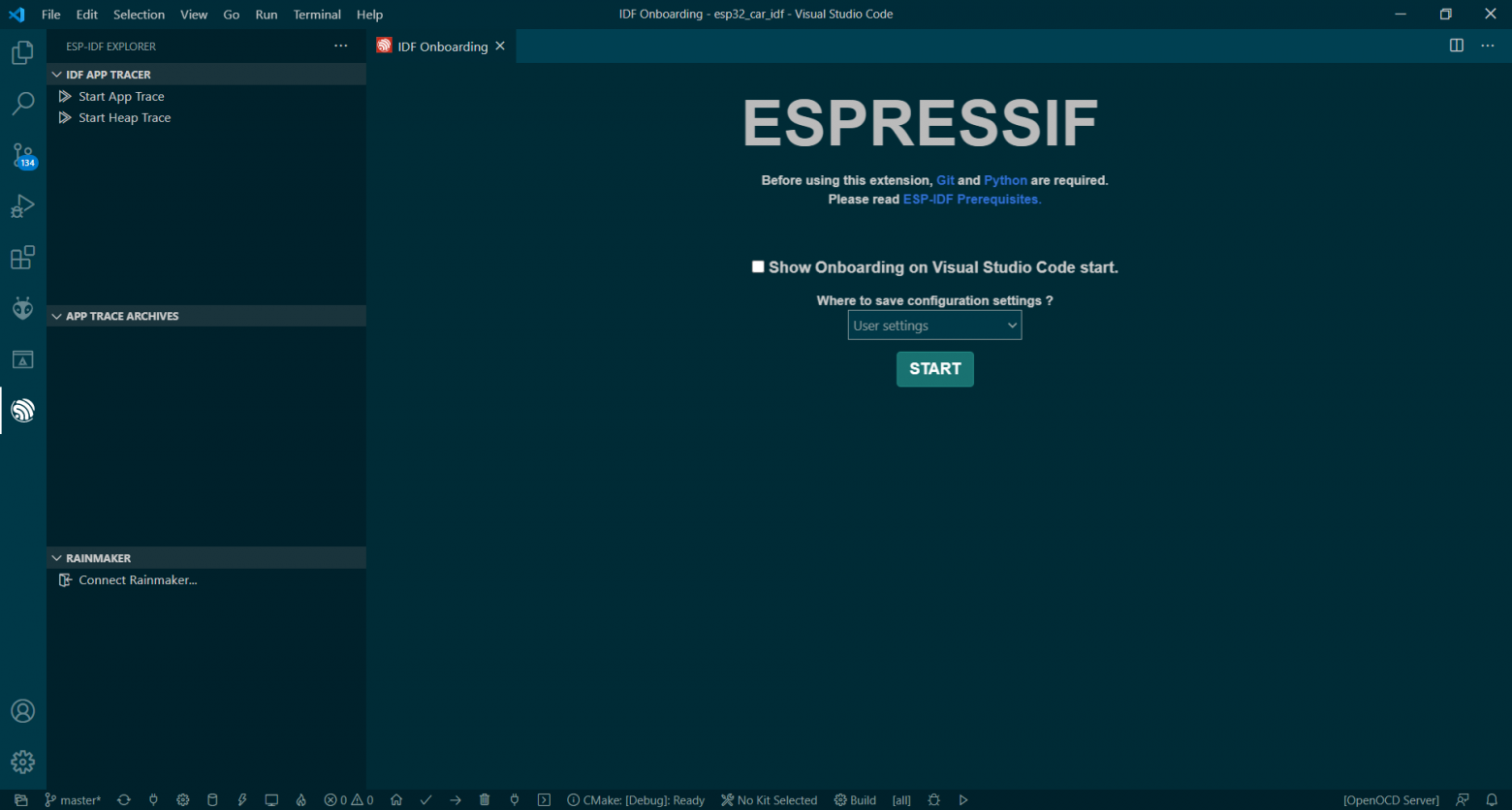
И последний, на мой взгляд, самый интересный вариант – это официальный плагин для Visual Studio Code.
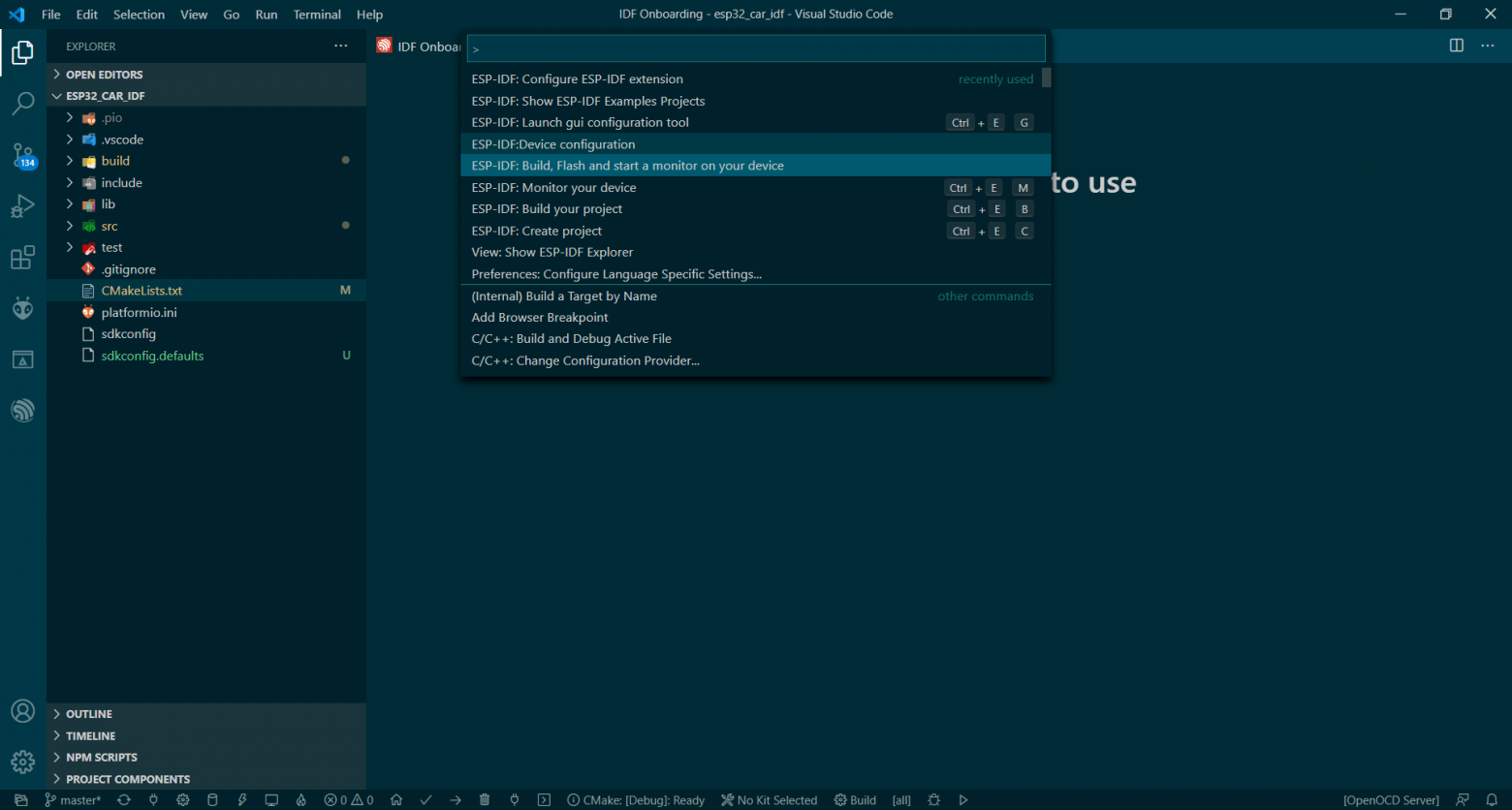
Как и PlatformIO, он легко устанавливается из раздела расширений. Установка и настройка ESP-IDF фреймворка в этом расширении представлена в качестве меню onboarding, о чем также говорится в описании. Загрузка и установка всех компонентов происходит автоматически в процессе прохождения этапов меню. Можно привести все скрины процесса, но они интуитивно понятны, и практически не требуют пояснения. В пользу PlatformIO можно отметить более удобный инструментарий билда, загрузки и мониторинга проекта. В отличие от этого ESP-IDF плагин управляется с помощью меню команд, которое можно вызвать с помощью клавиши F1 или сочетания клавиш, описанных в мануале.
Первоначальная настройка плагина
Преимущество использования плагина состоит в том, что соблюдается классическая структура проекта, нет необходимости как-то еще «шаманить» с настройками (в PlatformIO такая необходимость возникает). Есть один нюанс: если мы хотим открыть ранее созданный проект в Visual studio code с ESP-IDF плагином, то нам всего лишь необходимо скопировать в корень с проектом каталог .vscode, который можно получить, сгенерировав хотя бы один раз шаблонный проект с помощью ESP-IDF плагина.
Меню команд
FreeRTOS
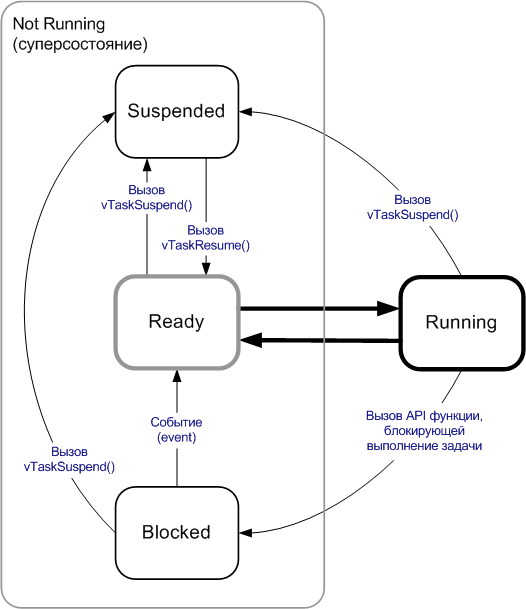
Согласно Википедии FreeRTOS — многозадачная операционная система реального времени (ОСРВ) для встраиваемых систем. FreeRTOS обеспечивает мультизадачность за счет совместного использования процессорного времени всеми потоками или, в терминологии ОС, задачами (task). На мой взгляд, наиболее полное и внятное руководство по FreeRTOS на русском находится здесь. На языке оригинала мануалы можно изучить из официального источника. Я лишь приведу рисунок состояния задач.
FreeRTOS была портирована на широкий спектр аппаратных платформ, включая процессоры Xtensa, используемые в ESP32. Подробнее можно ознакомиться в документации.
GPIOs
GPIO или универсальный ввод/вывод – это возможность дискретного управления пина сигналом «1» или «0».
Как видно из самого названия, такие пины имеют два рабочих режима: ввод или вывод. В первом случае мы читаем значение, во втором – записываем. Еще одним важным фактором при работе с GPIO является уровень напряжения. ESP32 — это устройство с напряжением 3,3 В. Поэтому следует быть осторожным при работе с другими устройствами, которые имеют напряжение 5 В и выше. Также важно понимать, что максимальный ток, которым можно нагружать вывод GPIO, составляет 12 мА. Для использования функций GPIO, предоставляемых ESP-IDF, нам необходимо подключить заголовок driver/gpio.h. Затем можно вызвать gpio_pad_select_gpio(), чтобы указать функцию данного вывода. На ESP32 доступно 34 различных GPIO. Они обозначены как:
- GPIO_NUM_0 – GPIO_NUM_19
- GPIO_NUM_21 – GPIO_NUM_23
- GPIO_NUM_25 – GPIO_NUM_27
- GPIO_NUM_32 – GPIO_NUM_39
Следующая нумерация не входит в число пинов 20, 24, 28, 29, 30 и 31.
Таблицу с распиновкой можно посмотреть здесь.
Следует обратить внимание, что пины GPIO_NUM_34 — GPIO_NUM_39 используют только режим ввода. Их нельзя использовать для вывода сигнала. Кроме того, контакты 6, 7, 8, 9, 10 и 11 используются для взаимодействия с внешней флеш-картой по SPI. Не рекомендуется их использовать для других целей, но если очень хочется, то можно. Тип данных gpio_num_t — это перечисление со значениями, соответствующими номерам пинов. Рекомендуется использовать эти значения, а не числа. Направление пина устанавливается с помощью функции gpio_set_direction (). Например, для установки пина как выход:
gpio_set_direction(GPIO_NUM_17, GPIO_MODE_OUTPUT);
Для установки пина в качестве входа:
gpio_set_direction(GPIO_NUM_17, GPIO_MODE_INPUT);
Если мы настроили GPIO как выход, то можем установить его значение равным 1 или 0, вызывая gpio_set_level ().
Следующий пример переключает GPIO раз в секунду:
gpio_pad_select_gpio(GPIO_NUM_17); gpio_set_direction(GPIO_NUM_17, GPIO_MODE_OUTPUT); while(1) { printf("Off\n"); gpio_set_level(GPIO_NUM_17, 0); vTaskDelay(1000 / portTICK_RATE_MS); printf("On\n"); gpio_set_level(GPIO_NUM_17, 1); vTaskDelay(1000 / portTICK_RATE_MS); }
В качестве альтернативы настройке всех атрибутов отдельных пинов мы можем установить свойства одного или нескольких контактов с помощью вызова функции gpio_config (). Она принимает в качестве входных данных структуру gpio_config_t и устанавливает направление, pull up, pull down и настройки прерывания для всех выводов, представленных в битовой маске.
Например:
gpio_config_t gpioConfig; gpioConfig.pin_bit_mask = (1 << 16) | (1 << 17); gpioConfig.mode = GPIO_MODE_OUTPUT; gpioConfig.pull_up_en = GPIO_PULLUP_DISABLE; gpioConfig.pull_down_en = GPIO_PULLDOWN_ENABLE; gpioConfig.intr_type = GPIO_INTR_DISABLE; gpio_config(&gpioConfig);
Pull up и pull down настройки
Обычно считается, что входной пин GPIO имеет сигнал высокого или низкого уровня. Это означает, что он подключен к источнику питания или к земле. Однако, если пин не подключен ни к чему, то он находится в «плавающем» (floating) состоянии. Часто необходимо установить начальный уровень неподключенного пина как высокий или низкий. В таком случае производится аппаратная (подключение c помощью резисторов) или программная подтяжка вывода соответственно к +V – pull up или к 0 – pull down. В ESP32 SDK мы можем определить GPIO как pull up или pull down с помощью функции gpio_set_pull_mode (). Эта функция принимает в качестве входных данных номер контакта, который мы хотим установить, и режим подтяжки, связанный с этим контактом.
Например:
gpio_set_pull_mode (21, GPIO_PULLUP_ONLY);
GPIO обработка прерывания
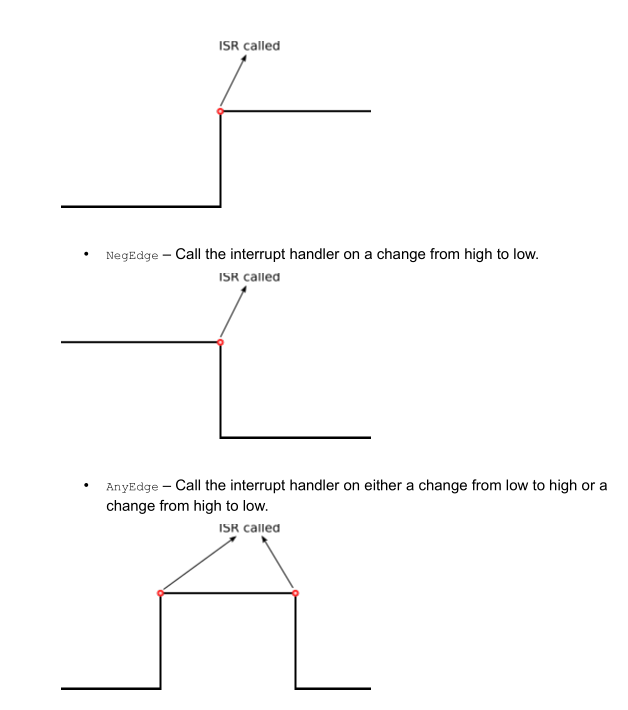
Чтобы обнаружить изменение входного сигнала на пине, мы можем периодически опрашивать его состояние, однако, это не лучшее решение по ряду причин. Во-первых, мы должны циклически делать проверку, тратя процессорное время. Во-вторых, в момент опроса состояние пина может быть уже не актуальное за счет задержки и есть риск пропустить входные сигналы. Решением этих проблем является прерывание. Прерывание похоже на дверной звонок: без него нам придется периодически проверять, есть ли кто-нибудь у двери. В исходном коде мы можем определить функцию обратного вызова прерывания, которая будет вызываться, когда вывод изменяет значение своего сигнала. Мы также можем определить, что является причиной вызова обработчика, установив следующие параметры:
- Disable – не вызывать прерывание при изменении сигнала;
- PosEdge — вызов обработчика прерывания при изменении с низкого на высокий;
- NegEdge — вызов обработчика прерывания при изменении с высокого на низкий;
- AnyEdge — вызов обработчика прерывания либо при изменении с низкого на высокий, либо при изменении с высокого на низкий;
Обработчик прерывания может быть отмечен для загрузки в ОЗУ во время компиляции. По умолчанию сгенерированный код находится во флэш-памяти. Если предварительно пометить его как IRAM_ATTR, он будет готов к немедленному выполнению из оперативной памяти.
void IRAM_ATTR my_gpio_isr_handle(void *arg) {...}
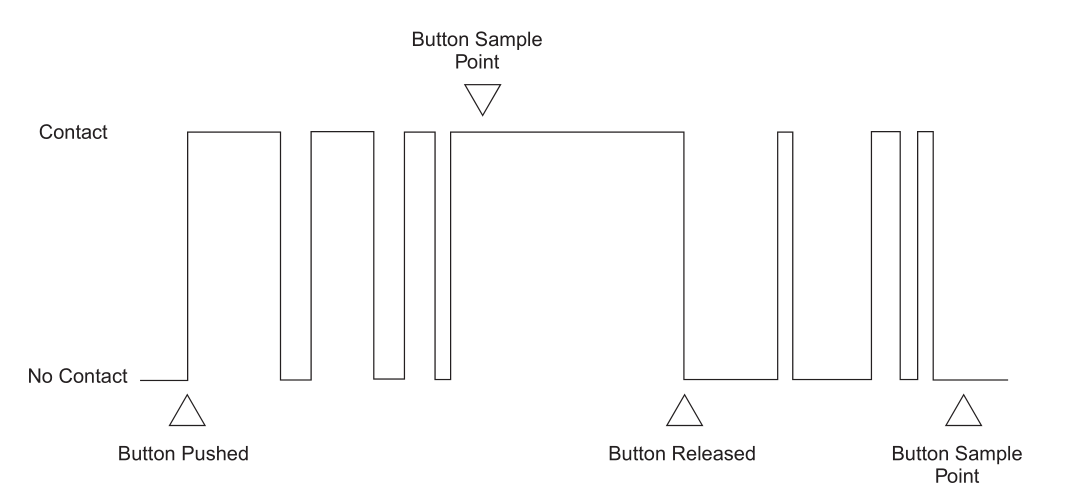
Кто работал с микроконтроллерами, знает, что обработка входных сигналов от кнопок сопровождается дребезгом контактов. Что может интерпретироваться как серия переходов, и следовательно, серия событий обработчика прерывания. Для этого мы должны внести в код обработку дребезга контактов. Для этого нам надо считать исходное событие, дождаться пока вибрации не утихнут, а затем выполнить повторную выборку входного состояния.
Следующий пример демонстрирует обработку прерывания входных сигналов. Настоятельно рекомендую ознакомится с управлением очередями во FreeRTOS для дальнейшего понимания кода, если вы еще с этим не знакомы. В примере показаны две задачи:
- test1_task, которая разблокируется при наступлении события прерывания при активации сигнала на пине 25. В консоль единократно выводится сообщение «Registered a click»;
- test2_task периодически опрашивается, и при активации сигнала на пине 26 каждые 100 мсек в консоль выводится сообщение «GPIO 26 is high!».
Выше также установлен программный таймер xTimer. Он не является обязательным для данного случая, скорее служит примером асинхронной задержки.
Антидребезг производится с помощью функции timeval_durationBeforeNow, которая проверяет, длится ли нажатие более 100 мсек. Есть и другие программные шаблоны против дребезга, но смысл примерно тот же. В составе ESP-IDF также имеется пример работы GPIO.
Обработка входных сигналов
#include <stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "driver/gpio.h" #include "esp_log.h" #include "freertos/queue.h" #include "c_timeutils.h" #include "freertos/timers.h" static char tag[] = "test_intr"; static QueueHandle_t q1; TimerHandle_t xTimer; #define TEST_GPIO (25) static void handler(void *args) { gpio_num_t gpio; gpio = TEST_GPIO; xQueueSendToBackFromISR(q1, &gpio, NULL); } void test1_task(void *ignore) { struct timeval lastPress; ESP_LOGD(tag, ">> test1_task"); gpio_num_t gpio; q1 = xQueueCreate(10, sizeof(gpio_num_t)); gpio_config_t gpioConfig; gpioConfig.pin_bit_mask = GPIO_SEL_25; gpioConfig.mode = GPIO_MODE_INPUT; gpioConfig.pull_up_en = GPIO_PULLUP_DISABLE; gpioConfig.pull_down_en = GPIO_PULLDOWN_ENABLE; gpioConfig.intr_type = GPIO_INTR_POSEDGE; gpio_config(&gpioConfig); gpio_install_isr_service(0); gpio_isr_handler_add(TEST_GPIO, handler, NULL); while(1) { //ESP_LOGD(tag, "Waiting on queue"); BaseType_t rc = xQueueReceive(q1, &gpio, portMAX_DELAY); //ESP_LOGD(tag, "Woke from queue wait: %d", rc); struct timeval now; gettimeofday(&now, NULL); if (timeval_durationBeforeNow(&lastPress) > 100) { if(gpio_get_level(GPIO_NUM_25)) { ESP_LOGD(tag, "Registered a click"); if( xTimerStart( xTimer, 0 ) != pdPASS ) { // The timer could not be set into the Active state. } } } lastPress = now; } vTaskDelete(NULL); } void test2_task(void *ignore) { gpio_set_direction(GPIO_NUM_26, GPIO_MODE_INPUT); gpio_set_pull_mode(GPIO_NUM_26, GPIO_PULLDOWN_ONLY); while(true) { if(gpio_get_level(GPIO_NUM_26)) { ESP_LOGD(tag, "GPIO 26 is high!"); if( xTimerStart( xTimer, 0 ) != pdPASS ) { // The timer could not be set into the Active state. } } vTaskDelay(100/portTICK_PERIOD_MS); } } void vTimerCallback( TimerHandle_t pxTimer ) { ESP_LOGD(tag, "The timer has expired!"); } void app_main(void) { xTaskCreate(test1_task, "test_task1", 5000, NULL, 8, NULL); xTaskCreate(test2_task, "test_task2", 5000, NULL, 8, NULL); xTimer = xTimerCreate("Timer", // Just a text name, not used by the kernel. 2000/portTICK_PERIOD_MS, // The timer period in ticks. pdFALSE, // The timers will auto-reload themselves when they expire. ( void * ) 1, // Assign each timer a unique id equal to its array index. vTimerCallback // Each timer calls the same callback when it expires. ); }
PCNT (Pulse Counter)
Модуль PCNT (счетчик импульсов) предназначен для подсчета количества нарастающих и/или спадающих фронтов входного сигнала. Каждый блок модуля имеет 16-битный регистр со знаком и два канала, которые можно настроить для увеличения или уменьшения значения счетчика. Каждый канал имеет входной сигнал, который фиксирует изменение сигнала, а также вход управления, который можно использовать для включения или отключения счета. Входы имеют дополнительные фильтры, которые можно использовать для устранения нежелательных выбросов сигнала.
Счетчик PCNT имеет восемь независимых счетных единиц (units), пронумерованных от 0 до 7. В API они указаны с помощью pcnt_unit_t. Каждый модуль имеет два независимых канала, пронумерованных 0 и 1 и указанных с помощью pcnt_channel_t.
Конфигурация предоставляется отдельно для каждого канала устройства с помощью pcnt_config_t и охватывает:
- Номер юнита и номер канала, к которому относится эта конфигурация;
- Номера GPIO импульсного входа и входа стробирующего импульса;
- Две пары параметров: pcnt_ctrl_mode_t и pcnt_count_mode_t для определения того, как счетчик реагирует в зависимости от состояния управляющего сигнала и того, как выполняется подсчет положительного/отрицательного фронта импульсов;
- Два предельных значения (минимальное/максимальное), которые используются для установления точек наблюдения и запуска прерываний, когда счетчик импульсов достигает некого предела.
Затем настройка конкретного канала выполняется путем вызова функции pcnt_unit_config() с указанной выше конфигурационной структурой pcnt_config_t в качестве входного параметра.
Чтобы отключить импульс или управляющий вход в конфигурации, нужно указать PCNT_PIN_NOT_USED вместо номера GPIO.
После выполнения настройки с помощью pcnt_unit_config() счетчик сразу же начинает работать. Накопленное значение счетчика можно проверить, вызвав pcnt_get_counter_value().
Следующие функции позволяют управлять работой счетчика: pcnt_counter_pause(), pcnt_counter_resume() и pcnt_counter_clear().
Также возможно динамически изменять ранее установленные режимы счетчика с помощью pcnt_unit_config(), вызывая pcnt_set_mode().
При желании контакт импульсного входа и контакт входа управления можно изменить на лету с помощью pcnt_set_pin().
Модуль PCNT имеет фильтры на каждом из импульсных и управляющих входов, добавляя возможность игнорировать короткие выбросы в сигналах. Длина игнорируемых импульсов предоставляется в тактовых циклах APB_CLK с помощью вызова pcnt_set_filter_value(). Текущие настройки фильтра можно проверить с помощью pcnt_get_filter_value(). Цикл APB_CLK работает на частоте 80 МГц.
Фильтр запускается/приостанавливается вызовом pcnt_filter_enable()/pcnt_filter_disable().
Следующие события, определенные в pcnt_evt_type_t, могут вызвать прерывание. Событие происходит, когда счетчик импульсов достигает определенных значений:
- Минимальные или максимальные значения счетчика: counter_l_lim или counter_h_lim, указанные в pcnt_config_t;
- Достижение уставки 0 или уставки 1, что устанавливаются с помощью функции pcnt_set_event_value ().
- Количество импульсов = 0
Чтобы зарегистрировать, включить или отключить прерывание для указанных выше событий, необходимо вызвать pcnt_isr_register(), pcnt_intr_enable() и pcnt_intr_disable(). Чтобы включить или отключить события при достижении пороговых значений, также потребуется вызвать функции pcnt_event_enable() и pcnt_event_disable().
Чтобы проверить, какие пороговые значения установлены на данный момент, нужно использовать функцию pcnt_get_event_value().
Пример из ESP-IDF представлен здесь.
Я использовал счетчик PCNT для вычисления скорости вращения колеса. Для этого необходимо считать количество импульсов на оборот, после чего обнулять счетчик.
Пример кода
typedef struct { uint16_t delay; //delay im ms int pin; int ctrl_pin; pcnt_channel_t channel; pcnt_unit_t unit; int16_t count; } speed_sensor_params_t; esp_err_t init_speed_sensor(speed_sensor_params_t* params) { /* Prepare configuration for the PCNT unit */ pcnt_config_t pcnt_config; // Set PCNT input signal and control GPIOs pcnt_config.pulse_gpio_num = params->pin; pcnt_config.ctrl_gpio_num = params->ctrl_pin; pcnt_config.channel = params->channel; pcnt_config.unit = params->unit; // What to do on the positive / negative edge of pulse input? pcnt_config.pos_mode = PCNT_COUNT_INC; // Count up on the positive edge pcnt_config.neg_mode = PCNT_COUNT_DIS; // Keep the counter value on the negative edge pcnt_config.lctrl_mode = PCNT_MODE_REVERSE; // Reverse counting direction if low pcnt_config.hctrl_mode = PCNT_MODE_KEEP; // Keep the primary counter mode if high pcnt_config.counter_h_lim = INT16_MAX; pcnt_config.counter_l_lim = - INT16_MAX; /* Initialize PCNT unit */ esp_err_t err = pcnt_unit_config(&pcnt_config); /* Configure and enable the input filter */ pcnt_set_filter_value(params->unit, 100); pcnt_filter_enable(params->unit); /* Initialize PCNT's counter */ pcnt_counter_pause(params->unit); pcnt_counter_clear(params->unit); /* Everything is set up, now go to counting */ pcnt_counter_resume(params->unit); return err; } int32_t calculateRpm(speed_sensor_params_t* params) { pcnt_get_counter_value(params->unit, &(params->count)); int32_t rpm = 60*(1000/params->delay)*params->count/PULSE_PER_TURN; pcnt_counter_clear(params->unit); return rpm; }
Широтно-импульсная модуляция (ШИМ) с использованием модуля MCPWM
Информация о модуле представлена здесь.
В сети имеется много статей на тему ШИМ, особенно если искать применительно к Arduino.
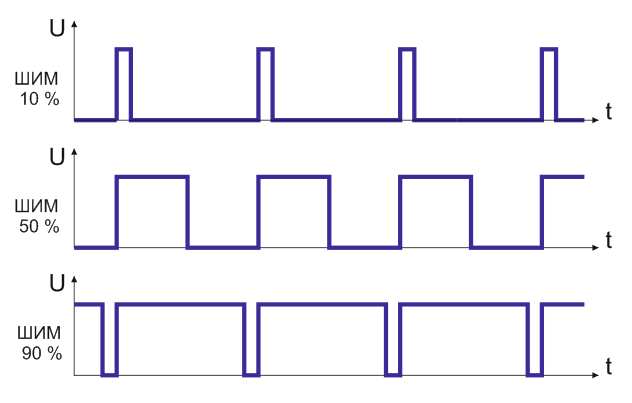
Википедия дает короткое и емкое определение: «Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью методом пульсирующего включения и выключения прибора». Принцип регулирования с помощью ШИМ – изменение ширины импульсов при постоянной амплитуде и частоте сигнала.
Частота ШИМ Arduino 488,28 Гц., разрешение — 8 разрядов (0…255), и имеется возможность использования шести аппаратных выводов: 3, 5, 6, 9, 10, 11. Однако, используя настройки регистров микроконтроллера AVR, можно добиться и других значений частоты ШИМ.
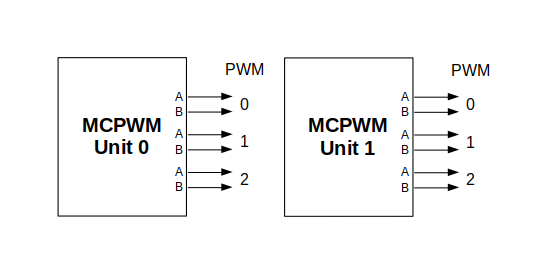
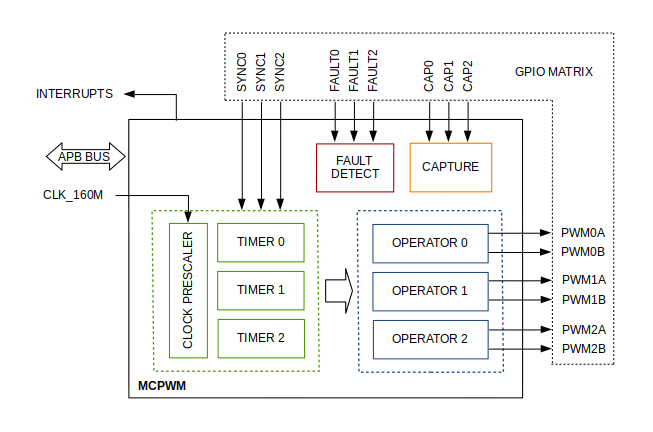
Микроконтроллер ESP32 имеет в своем арсенале отдельный модуль MCPWM, а точнее два модуля, каждый из которых имеет три пары ШИМ выводов:
Далее в документации выходы отдельного блока помечены как PWMxA / PWMxB.
Более подробная блок-схема блока MCPWM представлена ниже. Каждая пара A/B может синхронизироваться любым из трех таймеров: Timer 0, 1 и 2. Один и тот же таймер может использоваться для синхронизации более чем одной пары выходов ШИМ. Каждый блок также может собирать входные данные (например, сигналы синхронизации), обнаруживать сигналы тревог (например, перегрузка по току или перенапряжение двигателя), а также получать обратную связь с помощью сигналов захвата (например, на положение ротора).
Объем конфигурации зависит от типа двигателя и, в частности, от того, сколько выходов и входов требуется, и какой будет последовательность сигналов для управления двигателем.
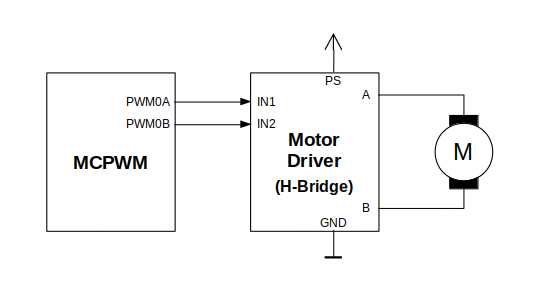
В нашем случае опишем простую конфигурацию для управления щеточным двигателем постоянного тока, который использует только некоторые из доступных ресурсов MCPWM. Пример схемы показан ниже. Он включает в себя H-мост для переключения поляризации напряжения, подаваемого на двигатель (M), и обеспечения достаточного тока для его управления.
Конфигурация включает следующие шаги:
- Выбор блока MPWn, который будет использоваться для привода двигателя. На плате ESP32 доступны два модуля из перечисленных в mcpwm_unit_t.
- Инициализация двух GPIO в качестве выходных сигналов в выбранном модуле путем вызова mcpwm_gpio_init (). Два выходных сигнала обычно используются для управления двигателем вправо или влево. Все доступные параметры сигналов перечислены в mcpwm_io_signals_t. Чтобы установить более одного вывода за раз, нужно использовать функцию mcpwm_set_pin () вместе с mcpwm_pin_config_t.
- Выбор таймера. В устройстве доступны три таймера. Таймеры перечислены в mcpwm_timer_t.
- Установка частоты таймера и начальной загрузки в структуре mcpwm_config_t.
- Вызов mcpwm_init () с указанными выше параметрами.
Существуют такие способы управления ШИМ:
- Мы можем установить высокое или низкое значение для конкретного сигнала с помощью функции mcpwm_set_signal_high () или mcpwm_set_signal_low (). Это заставит двигатель вращаться с максимальной скоростью или остановиться. В зависимости от выбранного выхода A или B двигатель будет вращаться вправо или влево.
- Другой вариант — подать на выходы сигнал ШИМ, вызвав mcpwm_start () или mcpwm_stop (). Скорость двигателя будет пропорциональна режиму ШИМ.
- Чтобы изменить режим ШИМ, необходимо вызвать mcpwm_set_duty () и указать значение режима в процентах. При желании можно вызвать mcpwm_set_duty_in_us (), чтобы устанавливать значение в микросекундах. Проверить текущее установленное значение можно с помощью вызова mcpwm_get_duty (). Фазу сигнала ШИМ можно изменить, вызвав mcpwm_set_duty_type (). Коэффициент заполнения устанавливается индивидуально для каждого выхода A и B с помощью mcpwm_generator_t. Значение коэффициента заполнения относится к длительности высокого или низкого выходного сигнала. Это настраивается при вызове mcpwm_init (), как описано выше, и выборе одной из опций в mcpwm_duty_type_t.
Пример кода для коллекторного двигателя находится здесь
В своем проекте я практически использовал код из примера, немного подкорректировав его, и добавил управление вторым двигателем. Для независимого управления ШИМ-каналами необходимо каждый из них настроить отдельным таймером, например MCPWM_TIMER_0 и CPWM_TIMER_1:
Пример кода
void mcpwm_example_gpio_initialize(void) { mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM0A, GPIO_PWM0A_OUT); mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM0B, GPIO_PWM0B_OUT); mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM1A, GPIO_PWM1A_OUT); mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM1B, GPIO_PWM1B_OUT); //mcpwm_gpio_init(MCPWM_UNIT_0, MCPWM_SYNC_0, GPIO_SYNC0_IN); mcpwm_config_t pwm_config; pwm_config.frequency = 1000; //frequency = 500Hz, pwm_config.cmpr_a = 0; //duty cycle of PWMxA = 0 pwm_config.cmpr_b = 0; //duty cycle of PWMxb = 0 pwm_config.counter_mode = MCPWM_UP_COUNTER; pwm_config.duty_mode = MCPWM_DUTY_MODE_0; mcpwm_init(MCPWM_UNIT_0, MCPWM_TIMER_0, &pwm_config); //Configure PWM0A & PWM0B with above settings mcpwm_init(MCPWM_UNIT_0, MCPWM_TIMER_1, &pwm_config); //Configure PWM0A & PWM0B with above settings // deadtime (see clock source changes in mcpwm.c file) mcpwm_deadtime_enable(MCPWM_UNIT_0, MCPWM_TIMER_0, MCPWM_BYPASS_FED, 80, 80); // 1us deadtime mcpwm_deadtime_enable(MCPWM_UNIT_0, MCPWM_TIMER_1, MCPWM_BYPASS_FED, 80, 80); }
Подключение к WI-Fi и работа с MQTT
Тема протокола Wi-FI достаточно обширная. Для описания протокола понадобится серия отдельных статей. В официальном руководстве можно ознакомиться с разделом Wi-Fi driver. Описание программного API находится здесь. Примеры кода можно посмотреть здесь.
Библиотеки Wi-Fi обеспечивают поддержку для настройки и мониторинга сетевых функций ESP32 Wi-Fi. Доступны такие конфигурации:
- Режим станции (также известный как режим STA или режим клиента Wi-Fi). ESP32 подключается к точке доступа;
- Режим AP (он же режим Soft-AP или режим точки доступа). Станции подключаются к ESP32.
- Комбинированный режим AP-STA (ESP32 одновременно является точкой доступа и станцией, подключенной к другой точке доступа);
- Различные режимы безопасности для вышеперечисленных (WPA, WPA2, WEP и т. д.);
- Поиск точек доступа (активное и пассивное сканирование);
- Смешанный режим для мониторинга пакетов Wi-Fi IEEE802.11.
MQTT протокол
Ознакомиться с темой можно здесь или здесь. Руководство ESP-IDF с примерами находится здесь.
Для настройки MQTT в коде сначала необходимо подключиться к сети Wi-Fi. После чего установить подключение к брокеру. Обработка сообщения производится в коллбеке, в качестве параметра которого выступает esp_mqtt_event_handle_t event. Если тип события равен MQTT_EVENT_DATA, значит можно парсить топик и данные. Можно настроить различное поведение в результате успешного подключения, отключения и подписки на топики.
Пример подключения к Wi-Fi:
tcpip_adapter_init(); wifi_event_group = xEventGroupCreate(); ESP_ERROR_CHECK(esp_event_loop_create_default()); ESP_ERROR_CHECK(esp_event_handler_register(WIFI_EVENT, ESP_EVENT_ANY_ID, &wifi_event_handler, NULL)); ESP_ERROR_CHECK(esp_event_handler_register(IP_EVENT, IP_EVENT_STA_GOT_IP, &ip_event_handler, NULL)); wifi_init_config_t cfg = WIFI_INIT_CONFIG_DEFAULT(); ESP_ERROR_CHECK( esp_wifi_init(&cfg) ); ESP_ERROR_CHECK( esp_wifi_set_storage(WIFI_STORAGE_RAM) ); ESP_ERROR_CHECK( esp_wifi_set_mode(WIFI_MODE_STA) ); wifi_config_t sta_config = { .sta = { .ssid = CONFIG_ESP_WIFI_SSID, .password = CONFIG_ESP_WIFI_PASSWORD, .bssid_set = false } }; ESP_ERROR_CHECK( esp_wifi_set_config(WIFI_IF_STA, &sta_config) ); ESP_LOGI(TAG, "start the WIFI SSID:[%s] password:[%s]", CONFIG_ESP_WIFI_SSID, "******"); ESP_ERROR_CHECK( esp_wifi_start() ); ESP_LOGI(TAG, "Waiting for wifi"); xEventGroupWaitBits(wifi_event_group, BIT0, false, true, portMAX_DELAY); //MQTT init mqtt_event_group = xEventGroupCreate(); mqtt_app_start(mqtt_event_group);
Подключение к MQTT брокеру
void mqtt_app_start(EventGroupHandle_t event_group) { mqtt_event_group = event_group; const esp_mqtt_client_config_t mqtt_cfg = { .uri = "mqtt://mqtt.eclipse.org:1883", //mqtt://mqtt.eclipse.org:1883 .event_handle = mqtt_event_handler, .keepalive = 10, .lwt_topic = "esp32/status/activ", .lwt_msg = "0", .lwt_retain = 1, }; ESP_LOGI(TAG, "[APP] Free memory: %d bytes", esp_get_free_heap_size()); client = esp_mqtt_client_init(&mqtt_cfg); esp_mqtt_client_start(client);
Обработчик MQTT
esp_err_t mqtt_event_handler(esp_mqtt_event_handle_t event) { esp_mqtt_client_handle_t client = event->client; int msg_id; command_t command; // your_context_t *context = event.context; switch (event->event_id) { case MQTT_EVENT_CONNECTED: xEventGroupSetBits(mqtt_event_group, BIT1); ESP_LOGI(TAG, "MQTT_EVENT_CONNECTED"); msg_id = esp_mqtt_client_subscribe(client, "esp32/car/#", 0); msg_id = esp_mqtt_client_subscribe(client, "esp32/camera/#", 0); ESP_LOGI(TAG, "sent subscribe successful, msg_id=%d", msg_id); break; case MQTT_EVENT_DISCONNECTED: ESP_LOGI(TAG, "MQTT_EVENT_DISCONNECTED"); break; case MQTT_EVENT_SUBSCRIBED: ESP_LOGI(TAG, "MQTT_EVENT_SUBSCRIBED, msg_id=%d", event->msg_id); msg_id = esp_mqtt_client_publish(client, "esp32/status/activ", "1", 0, 0, 1); ESP_LOGI(TAG, "sent publish successful, msg_id=%d", msg_id); break; case MQTT_EVENT_UNSUBSCRIBED: ESP_LOGI(TAG, "MQTT_EVENT_UNSUBSCRIBED, msg_id=%d", event->msg_id); break; case MQTT_EVENT_PUBLISHED: ESP_LOGI(TAG, "MQTT_EVENT_PUBLISHED, msg_id=%d", event->msg_id); break; case MQTT_EVENT_DATA: ESP_LOGI(TAG, "MQTT_EVENT_DATA"); printf("TOPIC=%.*s\r\n", event->topic_len, event->topic); printf("DATA=%.*s\r\n", event->data_len, event->data); memset(topic, 0, strlen(topic)); memset(data, 0, strlen(data)); strncpy(topic, event->topic, event->topic_len); strncpy(data, event->data, event->data_len); command_t command = { .topic = topic, .message = data, }; parseCommand(&command); break; case MQTT_EVENT_ERROR: ESP_LOGI(TAG, "MQTT_EVENT_ERROR"); break; default: break; } return ESP_OK; }
На этом я завершаю свое повествование об использовании модуля ESP32. В статье были рассмотрены примеры на ESP-IDF как фреймворка максимально использующего ресурсы модуля. Программирование с использованием других платформ, таких как JavaScript, MicroPython, Lua можно найти на соответствующих ресурсах. В следующей статье, как уже упоминалось, я приведу практический пример использования микроконтроллера, а также сравню программный подход Arduino и ESP-IDF.

