Сегодня различные робототехнические устройства все шире внедряются в сферу медицины. Это связано с развитием соответствующей элементной базы мехатронных и сенсорных устройств, разработкой биологически безопасных и гипоаллергенных материалов, а также методов получения и обработки информации о состоянии отдельных органов человека.

Среди протезов выделяют три вида.
В настоящее время в России протезами верхних конечностей ежегодно протезируются до 7 тыс. пациентов. В основном это косметические или тяговые протезы с простейшей функцией схвата кисти. За рубежом доля миоэлектрических протезов, в которых источником управляющих сигналов являются электрические потенциалы мышц-антагонистов составляет 50%, в нашей стране всего лишь 2-3%.
Мышцами-антагонистами называют такие две мышцы (или две группы мышц) одного сустава, которые при сокращении осуществляют тягу в противоположные стороны. Сгибание предплечья осуществляет двуглавая мышца плеча, а разгибание предплечья — трехглавая мышца плеча. Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют тягу в противоположных направлениях относительно локтевого сустава. Одна мышца (двуглавая мышца плеча) отвечает за сгибание, а вторая (трехглавая мышца плеча) отвечает за разгибание.
Бионические протезы не приобрели популярности в России, так как являются очень дорогими. Более того, визуально такое устройство представляет собой совокупность металлических соединений и проводов, в то время как косметические процессы практически точно повторяют образ руки человека. Кроме это, в стране не так много специалистов, которые могли бы правильно настроить данный вид протезов: сделать необходимые слепки, разместить датчики.
Также стоит учитывать, что возможности миоэлектрического управления протезом ограничиваются уровнем ампутации, т.е. количеством оставшихся функционирующих мышц. Для реабилитации пациентов с ампутацией руки выше локтя использование миоэлектрического управления нецелесообразно. В таких случаях применяют нейропротезы (интерфейс «мозг-компьютер») или технологию целевой мышечной реиннервации (TMR — Target Muscle Reinnervation). TMR метод заключается в том, что нервы, ранее отвечавшие за функциональные действия руки, подводятся к другим мышцам, сохранившимся после ампутации, а уже с них сенсорные датчики принимают сигнал и направляют его в процессор, управляющий электродвигателями, которые приводят протез в движение.

При разработке био- или нейроуправляемых биотехнических устройств в первую очередь необходимо определить способ получения информации о совершаемом движении. В современных биотехнических средствах типа систем взаимодействия человек — компьютер (Human Computer Interaction — HCI) используют биосигналы: электроэнцефалограммы (ЭЭГ), электромиограммы (ЭМГ), электронейрограммы (ЭНГ), электроокулограммы (ЭОГ).
Наибольшее распространение получило использование электромиограммы.
Именно миоэлектрические протезы позволяют реализовать управление различными функциональными движениями. Например, в современных коммерческих протезах предплечья пациент может управлять двумя движениями (схватом и ротацией) и контролировать скорость их выполнения. Однако даже этим простейшим движениям необходимо учиться, для этого разработана программа из восьми занятий, где изучают «свое новое тело» и пробуют им пользоваться.
Начало мышечного сокращения инициируется электрическими импульсами в нервных стволах, приходящих в мышечные волокна. Эти импульсы деполяризуют мембрану мышечных клеток, в результате чего в мышечных волокнах создается потенциал действия, который быстро распространяется по нервному волокну и приводит к его сокращению. Причем сокращение лишь инициируется этим потенциалом действия, а сам процесс сокращения гораздо длительнее. Используя игольчатые (инвазивные) или поверхностные электроды, можно зарегистрировать сумму потенциалов действия всех вовлеченных в процесс клеток.

Для выполнения функции «схват-раскрытие» необходимо сгибать-разгибать кисть. То есть управление протезом не является естественным (антропоморфным) и потребуется дополнительное обучение пациента, которое занимает недели. Исполнительный механизм движется «от края до края» без промежуточных положений — это связано с тем, что сигнал ЭМГ не отражает механические параметры мышечного сокращения. Единственное, что может контролировать пациент — пропорционально управлять скоростью выполнения движения.
Недостатком всех известных способов электромиографического управления протезами является то, что сигналы деполяризации от стимулированных одновременно мышц накладываются, поэтому получить сигнал ЭМГ об активности конкретной мышцы крайне тяжело. Кроме того, влияние перекрёстных (интерференционных) помех от соседних мышц возрастает с ростом расстояния между измерительными электродами.
Переключение между двумя движениями происходит механически или с помощью скрытого переключателя. Если же функций много — специальным кодированием азбукой Морзе или RFID-метками, расклеенных по всей квартире.

Глобальная задача, которая стояла перед учеными всего мира — добиться перекрестной классификации, т.е. обеспечить возможность одновременного захвата/раскрытия и ротации без вспомогательных переключений.
Перед командой разработчиков кафедры БМТ-2 «Биомедицинская техника» МГТУ стояла такая же задача — реализовать управление двумя движениями (схватом и ротацией кисти), но при этом добиться не просто пропорциональности управления, а сохранить антропоморфность этих движений. Под антропоморфностью понимается выполнение именно тех движений, о которых думает пациент в реальном времени. Этой задачей занимаются бауманские ученые — сотрудники кафедры БМТ-2.
Технической задачей настоящего изобретения является обеспечение возможности получения качественного и стабильного сигнала, который при управлении техническим устройством позволяет формировать пропорциональные степени мышечного сокращения управляющие воздействия с задержкой не более 120 мс.
Для решения поставленной задачи разработчики применили комбинированный подход, суть которого заключается в совместной регистрации электромиограммы и активной составляющей электрического импеданса с единой электродной системы. Электроимпедансная миография основана на измерении изменения электрического импеданса мышц, которые происходят во время мышечных сокращений.
Переменный ток стабильной амплитуды подается на зондирующие электроды, а с измерительных электродов регистрируется напряжение, которое, после частотного разделения каналов, преобразуется в ЭМГ и активное сопротивление участка тела, отражающее процесс механического сокращения мышцы. Экспериментально установлено, что мышечное сокращение приводит к пропорциональному изменению активного сопротивления, регистрируемого в проекции этой мышцы.

Протез производства ПАО РКК «Энергия»
Технический результат в данном случае состоит в обеспечении возможности получения управляющего сигнала, основанного на регистрации сокращения мышцы во времени.
В этом случае стало возможно отследить, зарегистрировать и превратить в управляющий сигнал «само движение мышцы» во времени, тогда как известные способы снятия биопотенциалов с мышцы с помощью мио-датчиков, фиксируют лишь начало сокращения.
Для управления используются две электродные системы, которые располагаются на культе в проекции мышц-антагонистов, так же, как и в миоэлектрическом протезе. Таким образом, не нарушается устоявшаяся технология протезирования.
В качестве электрофизиологического сигнала используют сигнал электрического импеданса.

На верхнем рисунке показана синхронная регистрация электрофизиологического сигнала — электрического импеданса и сигнала электромиограммы (ЭМГ) с электродов, расположенных на поверхности кожи над мышцей сгибателем пальцев при выполнении движения «схват кисти». Разработчикам МГТУ удалось достигнуть получение настолько четкого сигнала, что позволяет достичь возможности выполнения антропоморфных движений.

Для реализации способа авторами разработана структурная схема устройства, показанная выше, где ТЭ — токовый электрод, ИЭ — измерительный электрод, ИП — измерительный преобразователь.
Авторами также были разработаны электродные системы, представляющие собой основание (из резины или пластмассы), на котором закреплены четыре электрода. Через эти электроды подаётся ток (токовые электроды), а напряжение измеряется как разность потенциалов между электродами (потенциальные электроды). Данный способ реализуют в соответствие со структурной схемой, представленной ниже.
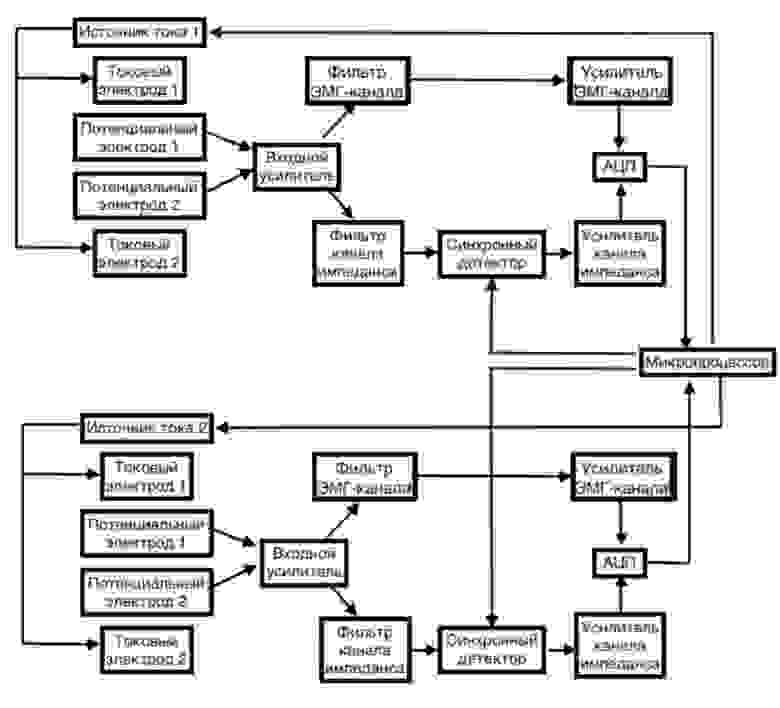
Сигнал ЭМГ отделяется от сигнала электрического импеданса полосовым фильтром с полосой пропускания от 50 Гц до 400 Гц (фильтр ЭМГ-канала). Амплитудно- модулированный сигнал электрического импеданса отделяется от сигнала ЭМГ полосовым фильтром с полосой пропускания от 10 кГц до 1 МГц (фильтр канала импеданса) и детектируется синхронным детектором. Для работы синхронного детектора в качестве несущей опорной частоты микропроцессор генерирует тот же опорный сигнал, что и для соответствующего источника тока. После дополнительного усиления, оба канала оцифровываются аналогово-цифровым преобразователем (АЦП). Так получают сигнал управления с одной мышцы.
Однако, для получения более качественного и стабильного сигнала управления техническим устройством следует использовать второй канал прибора, который, работая аналогичным образом, регистрирует сигнал электрического импеданса и сигнал ЭМГ со второй мышцы — мышцы-антагониста.
Чтобы исключить взаимное влияние двух электроимпедансных каналов, используется фазовое или временное разделение каналов.
Одним из возможных вариантов использования предложенного способа может служить устройство для бионического управления протезом кисти, которое состоит из: двух тетраполярных электродных систем; двухканального импедансного измерительного преобразователя; блока обработки; блока управления и исполнительного механизма — протеза кисти, как показано на рисунке.

Данный подход без переделок может использоваться не только для управления верхней конечностью, но и нижней.
Дальнейшее направление исследований в этой области — реализация сложного антропоморфного движения (например, одновременный захват и ротация кисти). При этом количество электродных систем и зоны их расположения должны остаться теми же самыми, чтобы не нарушать сложившуюся технологию протезирования.

Среди протезов выделяют три вида.
- Миоэлектрические протезы — протезы, управление в которых осуществляется за счет сигналов, возникающих при сокращении мышц. Эти сокращения считываются с помощью электромиографических (ЭМГ) датчиков. Также можно встретить другое название миоэлектрических протезов — бионические или биоэлектрические с внешним источником энергии.
- Косметические протезы — неуправляемые протезы, выполняют только декоративную функцию.
- Тяговые протезы — протезы, управление в которых осуществляется с помощью тяг и полностью контролируются усилиями самого человека без какой-либо электроники. Такие протезы позволяют искусственной кисти сжиматься за счет механической тяги противоположного плеча (натягивается — ослабевает трос).
В настоящее время в России протезами верхних конечностей ежегодно протезируются до 7 тыс. пациентов. В основном это косметические или тяговые протезы с простейшей функцией схвата кисти. За рубежом доля миоэлектрических протезов, в которых источником управляющих сигналов являются электрические потенциалы мышц-антагонистов составляет 50%, в нашей стране всего лишь 2-3%.
Мышцами-антагонистами называют такие две мышцы (или две группы мышц) одного сустава, которые при сокращении осуществляют тягу в противоположные стороны. Сгибание предплечья осуществляет двуглавая мышца плеча, а разгибание предплечья — трехглавая мышца плеча. Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют тягу в противоположных направлениях относительно локтевого сустава. Одна мышца (двуглавая мышца плеча) отвечает за сгибание, а вторая (трехглавая мышца плеча) отвечает за разгибание.
Бионические протезы не приобрели популярности в России, так как являются очень дорогими. Более того, визуально такое устройство представляет собой совокупность металлических соединений и проводов, в то время как косметические процессы практически точно повторяют образ руки человека. Кроме это, в стране не так много специалистов, которые могли бы правильно настроить данный вид протезов: сделать необходимые слепки, разместить датчики.
Также стоит учитывать, что возможности миоэлектрического управления протезом ограничиваются уровнем ампутации, т.е. количеством оставшихся функционирующих мышц. Для реабилитации пациентов с ампутацией руки выше локтя использование миоэлектрического управления нецелесообразно. В таких случаях применяют нейропротезы (интерфейс «мозг-компьютер») или технологию целевой мышечной реиннервации (TMR — Target Muscle Reinnervation). TMR метод заключается в том, что нервы, ранее отвечавшие за функциональные действия руки, подводятся к другим мышцам, сохранившимся после ампутации, а уже с них сенсорные датчики принимают сигнал и направляют его в процессор, управляющий электродвигателями, которые приводят протез в движение.

Как работают протезы
При разработке био- или нейроуправляемых биотехнических устройств в первую очередь необходимо определить способ получения информации о совершаемом движении. В современных биотехнических средствах типа систем взаимодействия человек — компьютер (Human Computer Interaction — HCI) используют биосигналы: электроэнцефалограммы (ЭЭГ), электромиограммы (ЭМГ), электронейрограммы (ЭНГ), электроокулограммы (ЭОГ).
Наибольшее распространение получило использование электромиограммы.
Именно миоэлектрические протезы позволяют реализовать управление различными функциональными движениями. Например, в современных коммерческих протезах предплечья пациент может управлять двумя движениями (схватом и ротацией) и контролировать скорость их выполнения. Однако даже этим простейшим движениям необходимо учиться, для этого разработана программа из восьми занятий, где изучают «свое новое тело» и пробуют им пользоваться.
Начало мышечного сокращения инициируется электрическими импульсами в нервных стволах, приходящих в мышечные волокна. Эти импульсы деполяризуют мембрану мышечных клеток, в результате чего в мышечных волокнах создается потенциал действия, который быстро распространяется по нервному волокну и приводит к его сокращению. Причем сокращение лишь инициируется этим потенциалом действия, а сам процесс сокращения гораздо длительнее. Используя игольчатые (инвазивные) или поверхностные электроды, можно зарегистрировать сумму потенциалов действия всех вовлеченных в процесс клеток.
Для выполнения функции «схват-раскрытие» необходимо сгибать-разгибать кисть. То есть управление протезом не является естественным (антропоморфным) и потребуется дополнительное обучение пациента, которое занимает недели. Исполнительный механизм движется «от края до края» без промежуточных положений — это связано с тем, что сигнал ЭМГ не отражает механические параметры мышечного сокращения. Единственное, что может контролировать пациент — пропорционально управлять скоростью выполнения движения.
Недостаток существующих методов
Недостатком всех известных способов электромиографического управления протезами является то, что сигналы деполяризации от стимулированных одновременно мышц накладываются, поэтому получить сигнал ЭМГ об активности конкретной мышцы крайне тяжело. Кроме того, влияние перекрёстных (интерференционных) помех от соседних мышц возрастает с ростом расстояния между измерительными электродами.
Переключение между двумя движениями происходит механически или с помощью скрытого переключателя. Если же функций много — специальным кодированием азбукой Морзе или RFID-метками, расклеенных по всей квартире.

Глобальная задача, которая стояла перед учеными всего мира — добиться перекрестной классификации, т.е. обеспечить возможность одновременного захвата/раскрытия и ротации без вспомогательных переключений.

Перед командой разработчиков кафедры БМТ-2 «Биомедицинская техника» МГТУ стояла такая же задача — реализовать управление двумя движениями (схватом и ротацией кисти), но при этом добиться не просто пропорциональности управления, а сохранить антропоморфность этих движений. Под антропоморфностью понимается выполнение именно тех движений, о которых думает пациент в реальном времени. Этой задачей занимаются бауманские ученые — сотрудники кафедры БМТ-2.
Разработка и ее особенности
Технической задачей настоящего изобретения является обеспечение возможности получения качественного и стабильного сигнала, который при управлении техническим устройством позволяет формировать пропорциональные степени мышечного сокращения управляющие воздействия с задержкой не более 120 мс.
Для решения поставленной задачи разработчики применили комбинированный подход, суть которого заключается в совместной регистрации электромиограммы и активной составляющей электрического импеданса с единой электродной системы. Электроимпедансная миография основана на измерении изменения электрического импеданса мышц, которые происходят во время мышечных сокращений.
Переменный ток стабильной амплитуды подается на зондирующие электроды, а с измерительных электродов регистрируется напряжение, которое, после частотного разделения каналов, преобразуется в ЭМГ и активное сопротивление участка тела, отражающее процесс механического сокращения мышцы. Экспериментально установлено, что мышечное сокращение приводит к пропорциональному изменению активного сопротивления, регистрируемого в проекции этой мышцы.

Протез производства ПАО РКК «Энергия»
Принцип работы
Технический результат в данном случае состоит в обеспечении возможности получения управляющего сигнала, основанного на регистрации сокращения мышцы во времени.
В этом случае стало возможно отследить, зарегистрировать и превратить в управляющий сигнал «само движение мышцы» во времени, тогда как известные способы снятия биопотенциалов с мышцы с помощью мио-датчиков, фиксируют лишь начало сокращения.
Для управления используются две электродные системы, которые располагаются на культе в проекции мышц-антагонистов, так же, как и в миоэлектрическом протезе. Таким образом, не нарушается устоявшаяся технология протезирования.
В качестве электрофизиологического сигнала используют сигнал электрического импеданса.

На верхнем рисунке показана синхронная регистрация электрофизиологического сигнала — электрического импеданса и сигнала электромиограммы (ЭМГ) с электродов, расположенных на поверхности кожи над мышцей сгибателем пальцев при выполнении движения «схват кисти». Разработчикам МГТУ удалось достигнуть получение настолько четкого сигнала, что позволяет достичь возможности выполнения антропоморфных движений.

Для реализации способа авторами разработана структурная схема устройства, показанная выше, где ТЭ — токовый электрод, ИЭ — измерительный электрод, ИП — измерительный преобразователь.
Авторами также были разработаны электродные системы, представляющие собой основание (из резины или пластмассы), на котором закреплены четыре электрода. Через эти электроды подаётся ток (токовые электроды), а напряжение измеряется как разность потенциалов между электродами (потенциальные электроды). Данный способ реализуют в соответствие со структурной схемой, представленной ниже.

Сигнал ЭМГ отделяется от сигнала электрического импеданса полосовым фильтром с полосой пропускания от 50 Гц до 400 Гц (фильтр ЭМГ-канала). Амплитудно- модулированный сигнал электрического импеданса отделяется от сигнала ЭМГ полосовым фильтром с полосой пропускания от 10 кГц до 1 МГц (фильтр канала импеданса) и детектируется синхронным детектором. Для работы синхронного детектора в качестве несущей опорной частоты микропроцессор генерирует тот же опорный сигнал, что и для соответствующего источника тока. После дополнительного усиления, оба канала оцифровываются аналогово-цифровым преобразователем (АЦП). Так получают сигнал управления с одной мышцы.
Однако, для получения более качественного и стабильного сигнала управления техническим устройством следует использовать второй канал прибора, который, работая аналогичным образом, регистрирует сигнал электрического импеданса и сигнал ЭМГ со второй мышцы — мышцы-антагониста.
Чтобы исключить взаимное влияние двух электроимпедансных каналов, используется фазовое или временное разделение каналов.
Одним из возможных вариантов использования предложенного способа может служить устройство для бионического управления протезом кисти, которое состоит из: двух тетраполярных электродных систем; двухканального импедансного измерительного преобразователя; блока обработки; блока управления и исполнительного механизма — протеза кисти, как показано на рисунке.

Данный подход без переделок может использоваться не только для управления верхней конечностью, но и нижней.
Дальнейшие перспективы
Дальнейшее направление исследований в этой области — реализация сложного антропоморфного движения (например, одновременный захват и ротация кисти). При этом количество электродных систем и зоны их расположения должны остаться теми же самыми, чтобы не нарушать сложившуюся технологию протезирования.
