
Собственно, факт изучения и эксплуатации беспилотников в стенах МАИ не является секретом – было бы странно, если бы этим не занимались в подобном вузе. Изучение БПЛА различных видов и различного назначения присутствуют практически во всех образовательных программах учреждения, а в корпусе №24 на шестом этаже находятся мастерские Школы дронов, где «сумрачный маёвский гений» собирает невиданные раньше беспилотные аппараты.
За постпандемийным валом работы и прочими заботами всё недосуг было зайти познакомиться, но вот – ура – наконец-то выпадает свободная неделя, и для себя я решаю потратить ее на знакомство с беспилотной авиацией.
Бэкграунд по беспилотникам перед курсами у меня был околонулевой, только лишь летом, вновь заинтересовавшись темой, разобрался в нюансах регистрации БЛА в России и получения разрешения на полеты – и изложил в этой статье.
Я записался на двухдневный курс «Оператор дрона», он предполагает минимум теории и максимум летной практики. Это значит, что упор делается на полеты в симуляторе и реальные полеты. Цель заключалась именно в этом – максимально полетать на разных штуках, а потом, если повезет, посмотреть на сборочные мастерские.
После регистрации на курс со мной связались организаторы, подтвердили мое участие и сообщили, что в понедельник утром необходимо подойти на КПП-7 института.

День первый. Введение в дроны
Обучение начинается с брифинга: классификация дронов в общем виде, механика движения, основы управления.
Какие дроны вообще бывают? Если подразделять БПЛА по внешнему виду, то они бывают: самолетного типа, то есть с крылом, создающим подъемную силу, также бывают мультикоптерные (мультироторные) системы, построенные на схеме из двух и более винтов, еще есть беспилотные аэростаты и различные гибридные системы, наподобие конвертопланов. План обучения в Школе строится преимущественно вокруг мультироторных систем, если еще точнее — в основном с квадрокоптерами, то есть с аппаратами, имеющими винтомоторную группу (ВМГ) из четырех винтов.

Принцип управления движением коптера прост — вращение пропеллеров создает тягу, с помощью которой управляется высота. Чем быстрее вращение пропеллеров, тем с большей скоростью машина набирает высоту. Вращение пропеллеров называется «газ» или «обороты». Обычно газ измеряется в процентах, где 0 — это полное отсутствие вращения, а 100 — максимальная загрузка моторов. Важное понятие здесь – это «газ висения», или тот уровень оборотов, при котором коптер зависает в воздухе, не набирая и не теряя высоту.
Движение по горизонтали и повороты достигаются изменением скорости вращения одного или двух винтов через пульт управления — ускоряя два расположенных рядом винта, оператор наклоняет машину и заставляет лететь в направлении, противоположном этим двум винтам.

Что касается разворотов вокруг своей оси, то тут механика следующая – все пропеллеры крутятся в противоположных направлениях, и вращение каждого винта создает реактивный крутящий момент, который старается повернуть дрон в сторону, противоположную вращению винта. В квадрокоптерах этот крутящий момент каждого из винтов уравновешивается другим. Всего в квадрокоптере два винта вращаются по часовой стрелке и два против. Но если увеличить обороты пары, вращающейся по часовой стрелке, и в равной мере уменьшить обороты у другой пары, нескомпенсированный реактивный момент вызовет вращение машины вокруг своей вертикальной оси.
В управлении есть несколько основных понятий для совершения полета:
Арм (arm — вооружить, завести). Термин обозначает разблокирование моторов коптера для перехода в полетное состояние. «Заармить коптер» — означает «заставить винты крутиться», при этом сам дрон еще не отрывается от земли. «Завести» моторы можно с помощью определенного движения стиков на пульте, и у разных БЛА эти движения могут различаться.

Дизарм (disarm — разоружить). Понятие, обратное арму — приведение моторов дрона в неактивное состояние, в котором он перестает реагировать на стики газа.
Управление движением стиками на пульте.
Throttle (см. рисунок ниже) – это общий газ, с помощью движения левого стика вверх происходит увеличение оборотов пропеллеров, движение вниз уменьшает их. Соответственно изменению тяги происходит управление по высоте – при увеличении оборотов машина идет вверх, при уменьшении – вниз.
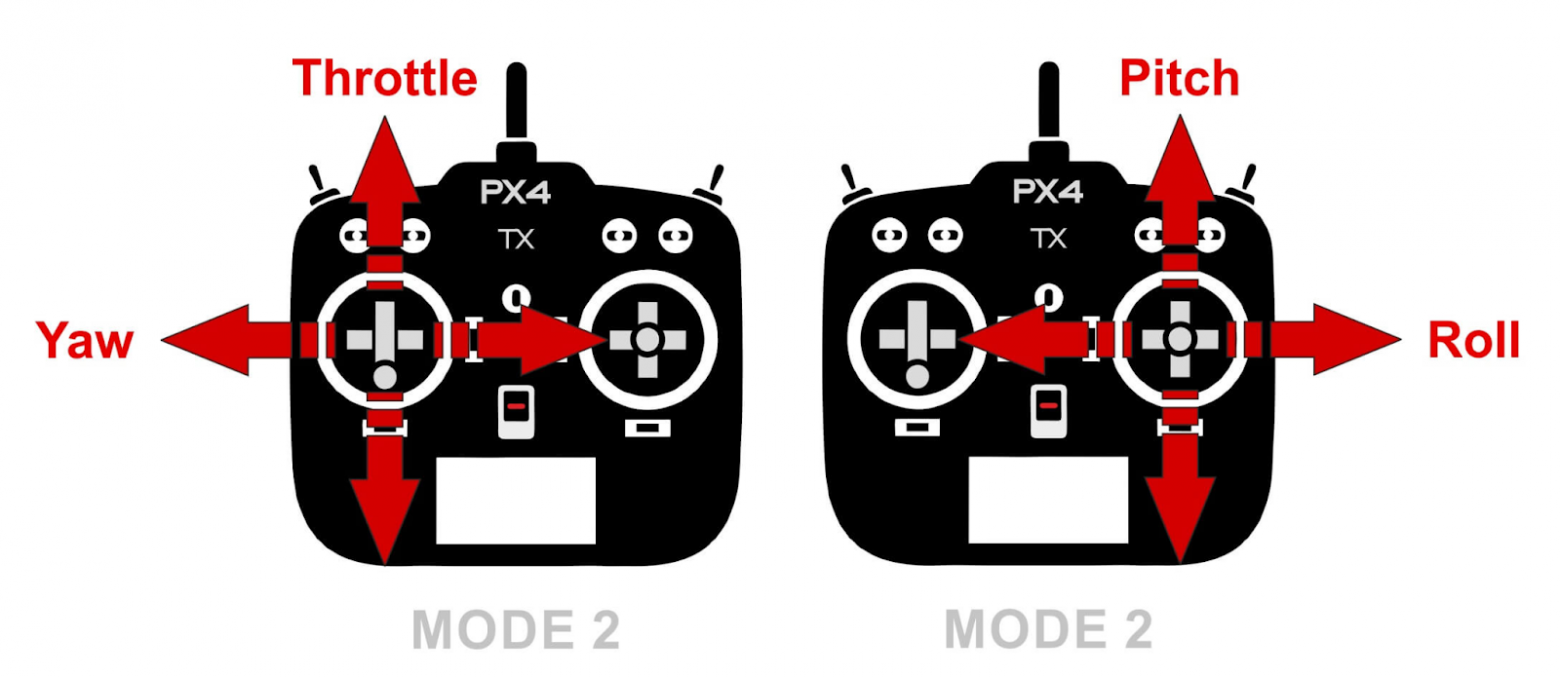
Yaw – это рысканье или вращение в горизонтальной плоскости. Отклонением левого стика влево оператор добивается поворота налево, отклонением левого стика вправо — поворота направо.

Pitch — это наклон дрона вперед или назад (тангаж). Тангаж определяет движение коптера вперед или назад. Поднятие правого стика на пульте вверх – и коптер летит вперед, опускание вниз — он летит назад.
Roll – это крен, движение вправо-влево по горизонтали. Управляется отклонением правого стика на пульте влево и вправо соответственно.

Общий газ, тангаж, рысканье и крен – из этих четырех вещей складывается управление квадрокоптером.
FPV – (First Person View, «вид от первого лица») – режим полета по камере, оператор БПЛА может видеть «глазами дрона», получая картинку в реальном времени от установленной на борту беспилотника камеры через видеоканал на очки или монитор.

LOS (Line of Sight, «в поле зрения») – режим пилотирования, при котором оператор наблюдает свой дрон визуально в течение полета. В некоторой степени это термин, обратный FPV.
После короткого введения нас приглашают на симулятор. Похоже это на компьютерную игру: программа симулятора устанавливается на ноутбук, выбирается трасса полета, летательный аппарат, а курсант, управляя машиной на экране с помощью пульта, должен за минимальное время пройти все контрольные точки, не разбив при этом машину. С помощью таких симуляторов проводят первоначальную подготовку пилотов для дрон-рейсинга – гонок на FPV-беспилотниках.
На компьютере я летаю именно на квадрокоптере. Симулятор точно воспроизводит реальные характеристики пилотируемой модели. Также присутствует разрушаемость коптера – ударившись винтом о твердый предмет, программа имитирует повреждение пропеллера, и летные характеристики ухудшаются. При успешном прохождении трассы миссия завершается, при повреждении дрона до полной потери летных качеств – начинается заново. У моей модели отсутствовали вспомогательные системы типа корректировки положения по GPS или удержания высоты по барометру, так что я, новичок в деле управления, бездарно разбил дрон десяток-другой раз, прежде чем освоиться и начать сносно держаться в воздухе.
Поскольку, кроме общих принципов и базовых движений стиками пульта, до нас ничего не доводят, переход к симулятору сродни прыжку в холодную воду. Сделано это, надо думать, чтобы обучающийся сразу пытался «почувствовать» коптер, интуитивно научиться управлять им. Надо признать, такая тактика приносит результат, но применять ее надо именно с симулятором, потому что никаких реальных дронов не нее не хватит.

Во время занятий обязательно делать перерывы. Отдыхая от летной практики, можно рассмотреть разложенные вокруг беспилотники – серийные и самодельные.


Долго разглядывать творческий беспорядок у меня не получилось. Следующее упражнение – полеты на Tiny Whoop. Это особый тип квадрокоптеров маленького размера с закрытыми винтами, они используются для тренировки мастерства полетов в условиях ограниченного пространства.

Конструкция безопасна. Закрытые пластиковыми кольцами винты и малая масса минимизируют риски травм у присутствующих и разрушений в «комнате полетов». Удержать такой аппарат в воздухе сложнее, чем кажется. Прежде чем минимально освоиться, я влетаю во всё подряд с десяток-другой раз.

У квадрокоптеров время полета ограничено емкостью аккумулятора, соответственно, чем меньше аккумулятор, тем меньше времени он может летать. У выданного мне «тиника» небольшая батарея, всего 380 миллиампер, и через 5 минут мощности для создания винтами необходимой подъемной силы уже не хватает – и я веду дрон на посадку.
Ну, зато этих аккумуляторов много, и после замены можно снова подниматься в воздух.
Первое летное задание для новичков – взлететь на дроне и держать его неподвижно, корректируя положение стиками на пульте управления. «Тиник» имеет минимум вспомогательных систем, из-за чего без ручного управления так и норовит дрейфовать по всей комнате.
Путем проб и ошибок выработана определенная схема успешного выполнения задания, ха-ха. После арма требуется медленно перемещать левый стик вверх до тех пор, пока дрон не наберет желаемую высоту. После набора надо удержать его в неподвижном состоянии, а для этого тот же левый стик перемещаем вниз очень плавно, в противном случае тиник продолжит набор высоты. В итоге, чтобы «поймать» тиник, потребуется совершить несколько движений левым стиком вверх-вниз. Параллельно с корректировкой по высоте необходимо следить за креном и удерживать направление «по носу». Главная фича – в течение всех упражнений не допускать никаких резких движений стиками, это залог успеха.
Следующее задание сложнее – управлять дроном, повернув его к себе «лицом». Управление по направлению движением в этом случае инвертируется, и оператор должен иметь определенные рефлексы в такой ситуации.
Третье задание – полет по квадрату. Курсант должен дроном пролететь по квадрату, удерживая высоту и курс вперёд, то есть постоянно разворачивать коптер «носом» по курсу движения. Здесь также необходимо помнить о постоянной работе левым стиком вверх-вниз для удержания высоты. Это становится более сложным, поскольку мозг занят еще и обрабатыванием поворотов коптера в углах квадрата. Однако это необходимое упражнение, и после его освоения дело пойдет легче.
После полетов на маленьком квадрокоптере наступило время перерыва.


Вообще, над Москвой летать нельзя, и беспилотникам в том числе. Но МАИ – авиационный вуз, и на территории разрешены полеты для испытания техники на высоте до 60 метров.
Сегодня мы летаем на DJI Mavic 2, все впервые. Перед полетом на открытом воздухе требуется провести предполетную подготовку: наметить маршрут полетов, обратить внимание на скопления людей, воздушные линии проводов, высокие деревья, ознакомиться с прогнозом погоды, в том числе с облачностью на разных высотах и так далее. В этот раз подготовку проводит инструктор.
Для начала нам включают режим Tripod, в некоторых моделях он называется Cinematic. Этот режим предназначен для видеосъемки, в нём коптер движется максимально плавно, медленно разворачиваясь и развивая небольшую скорость. Поскольку все летают первый раз, этот режим наиболее безопасен и помогает неспешно освоиться с управлением.

После того как все освоились, переходим на режим Position. В нем коптер действует быстрее, чем в режиме Tripod, и полеты становятся динамичнее.
Вообще, продукция DJI стоит недешево; так, сейчас за Mavic 3 московские магазины просят от 220 до 300 тысяч, в зависимости от комплектации. Поэтому я, когда думал о покупке хорошего дрона для съемки, планировал сначала купить какой-нибудь китайский, чтобы отрабатывать пилотирование на том, чего не жалко. Разбить «птичку» стоимостью в 300к из-за собственной неопытности – удовольствие ниже среднего.
На практике же оказалось, что Мавик весьма лоялен к неопытному оператору и прощает ошибки в пилотировании. На борту у дрона есть направленные в разные стороны лидары, которые предупредят пилота о близком препятствии и в случае необходимости коптер зависнет на одном месте самостоятельно. Также, различные системы стабилизации делают управление дроном предсказуемым и послушным, он автоматически корректирует свое положение по GPS и барометру, а в случае поворота или остановки инерция автоматически гасится – в полете видно, как дрон оттормаживается при маневрах. Проще говоря, такой квадрокоптер не надо «ловить» при движении, автоматика всё сделает сама. Также в наличии кнопка возврата домой и режим возврата при низком заряде батареи.

При этом нельзя сказать, что этот коптер невозможно разбить. Есть определенные условия, при которых бортовые лидары не увидят препятствие, ещё на полет могут повлиять антенны сотовой связи и так далее. К примеру, висящие в воздухе провода системы безопасности не увидят практически наверняка. При всей продвинутости систем безопасности БПЛА первичная подготовка оператора необходима.

Время до вечера пролетело незаметно. После занятий мне любезно предоставили возможность дополнительно полетать на «тинике» с очками FPV и дали посмотреть на мастерские Школы дронов.

")


Параллельно с моим двухдневным курсом обучение проходили группы по пяти- и десятидневным программам. В процессе прогулки по корпусу я поинтересовался деталями, и оказалось, что их учебный план, помимо широкой теоретической части, также включает выездную летную практику. Против такого «козыря» я устоять не смог и договорился о своем переводе с двухдневного курса на пятидневный. Со следующего дня я пошел на занятия в другую группу.
День второй. Базовая аэродинамика, лидары, устройство БПЛА и документы на полет
Придя на следующий день в аудиторию, я глянул у своих новых одногруппников вчерашние конспекты. По существу, ничего серьезного я не пропустил. Поскольку курс рассчитан на подготовку с нуля, то первый день теории был посвящен самой базе: типы БПЛА, возможные цели применения, регистрация беспилотника в Росавиации, вот это вот всё.

Второй день отведен под более конкретные вещи. Мы рассматриваем базовые понятия аэродинамики, внутреннее устройство беспилотников (а вы знаете, что такое БАНО?), их возможную полезную нагрузку, а после обеда учимся пользоваться fpln.ru и детально штудируем схему получения разрешения на вылет. Последнее я разбирал в предыдущей статье про БПЛА и полным нулем в предмете не был, тем не менее большой ценностью были разборы получения разрешений на ИВП на примере реальных кейсов.
Не стоит даже пытаться описать в деталях все аспекты, которые были разобраны в этот день, но стоит подробнее остановиться на одном вопросе безопасности.
Одним из видов полезной нагрузки БПЛА является система лидаров (или система визуального позиционирования), которая позволяет машине поддерживать текущее положение и избегать столкновений. Летая на дронах, оснащенных такой системой, легко поддаться ложному чувству защищенности. Может показаться, что машина не допустит столкновения с чем-либо даже при грубейших ошибках в пилотировании и всегда вовремя считает препятствие и остановится.

То, что это далеко не так, уже было упомянуто инструктором на первом дне перед началом полетов на Мавике, но здесь мы остановились подробнее. Итак, системы предупреждения столкновений могут не сработать в следующих ситуациях:
при полете в осадки, они могут вызвать загрязнение лидаров и снижение чувствительности,
при полете на высоких скоростях,
при полете над водой или прозрачными поверхностями,
при полете в местах с резким изменением уровня освещения,
при полете около мест с одноцветной поверхностью (например, вдоль белой стены),
при полете над наклонными поверхностями.
Отдельным вызовом был построчный разбор содержания полетного плана, который надлежит подавать в центр ОрВД для получения разрешения на полет. Писать его вручную сродни ручному переписыванию IPv6 адресов, и я всегда думал, что все составляют его через программы, но, видимо, нет. Выглядит он так:

К концу дня каждый из курсантов знает значение каждой строки в плане и может вручную написать план полетов под себя, вместе с остальным пакетом документов на использование воздушного пространства.

За писаниной конспектов и самостоятельных работ незаметно пролетел второй день. Оглядываясь назад могу сказать, что он был самым скучным из моих пяти, но необходимым, особенно для тех, кто пришел не просто глазами похлопать (как я), а в интересах бизнеса. Многие компании сейчас осваивают использование беспилотников в своих отраслях и специально отправляют сотрудников на подобные курсы. Таких курсантов видно сразу – каждое слово преподавателя тщательно заносят «в протокол».
День третий. Аэрофотосъемка
Третий день в программе был последним отведенным на теорию. Следующие два – только практические полеты, так что на учебу с утра я еду с большим нетерпением. Побыстрее бы с теорией отстреляться, а там уже полеты!
Ключевые темы дня – построение ортофотопланов и 3D-моделей местности с помощью БПЛА. Ортофотоплан, если вкратце, это фотографический план местности, созданный с помощью аэрофотосъемки с беспилотника. БПЛА летит над землей на заданной высоте по определенному маршруту, который заложен в автопилот, и фотографирует поверхность, а получившиеся снимки группируются и «сшиваются» между собой. Такой фотографический план обладает большой точностью и детализацией, и используется в сельском хозяйстве, строительстве, при составлении кадастровых карт и так далее.

Составление 3D-модели местности позволяет получить реалистичную трехмерную копию объекта с учетом рельефа, что особенно ценно в маркшейдерском деле. Маркшейдеров у меня в группе не было, но зато было аж два геодезиста :D

И ортофотопланы, и 3D модели создаются вручную. Их составление – навык, который требует наработки.
Главный враг в аэрофотосъемке – несовпадение объектов на фотографии с реальностью. Например, предметы, в реальности абсолютно прямые, на снимке выглядят немного «волнистыми». Выглядит забавно, но это ошибка, за которую иногда приходится всё перелётывать по-новой.

Такие ошибки могут возникнуть как из-за небрежно скомпонованных исходных снимков, так и из-за неправильного полета дрона. Значение может иметь даже дисторсия камеры.

На выходе у меня получаются модели сносного качества, но до идеала еще сильно далеко. Кстати, файлы ортофотопланов очень тяжелые, мой получился около 2 Гб.
Работа с аэрофотосъемкой длилась до самого конца занятий, и сидя в метро, я на hh смотрел вакансии инженеров-геодезистов с опытом управления БПЛА. Нас, конечно, и на этой работе неплохо кормят, но…
День четвертый. Практические полеты
Что ж, с теорией было покончено, и всё время на последних двух днях было отведено на практику. По плану, утром четвертого дня мы собирались у института, а дальше должны были отправиться автобусами на полигон в Московской области. Возврат в Москву предстоял только вечером.
В программе сегодня ручные и автоматические полеты. Одна половина обучающихся идет строить планы автополетов с помощью ArduPilot, вторая, в которой и я, готовится летать на квадрокоптерах в поле.
Здесь следует подробнее остановиться на предполетной подготовке, то есть какие действия должны быть выполнены, прежде чем машина поднимется в воздух.
Если не задерживаться на вопросах законодательства (полет должен быть согласован с ОрВД, БЛА зарегистрирован в Росавиации – само собой), то для безопасного полета предполетная проверка перед каждым вылетом должны включать в себя:
Изучение и оценку полетной зоны.
Необходимо оценить особенности рельефа местности, обратить внимание на воздушные коммуникации (ЛЭП и т.д.) и их возможное влияние на полет.
Метеорологическую оценку зоны полетов.
Оценить вероятность осадков, скорость и направление ветра, облачность, высота солнца. Всё это может затруднить слежение за дроном. Наилучшее время для полета – безоблачный день с хорошей видимостью, отсутствием ветра и в часы, когда солнце не находится в своей самой высокой отметке. Кроме того, необходимо обращать внимание на возможные помехи от пролета птиц и проявлять особенную осторожность в случае полета вблизи закрытых зон и зон ограничений полетов.
Этот пункт подготовки следует выполнять дважды – за час до полета и непосредственно перед взлетом, за 5-10 минут.
Предполетные проверки и осмотры дрона.
Необходимо провести внешний осмотр на предмет дефектов, особое внимание уделить пропеллерам, аккумулятору и антенне. Убедиться, что аккумуляторы пульта и коптера заряжены. Проверить качество сигнала между машиной и пультом управления. Убедиться, что ничего не мешает вращению пропеллеров. На место старта обязательно брать с собой запасные аккумуляторы, пропеллеры, минимальный набор инструментов.
Что-что, кстати, а с погодой нам невероятно повезло. Мало того что она полностью лётная, так еще и пилотам пока что не слишком холодно часами стоять на воздухе, нечасто такое бывает в конце октября.

Взлетать можно только с ровной площадки плавным отклонением стика газа вверх. Все зрители при этом должны стоять за спиной оператора, а он сам – не менее чем в трех метрах от аппарата.
Первым из группы летаю я. Стартовое задание тут такое же, как и на симуляторе в первый день, надо просто подняться в воздух и зависнуть на месте. Это совсем несложно, коптеры хоть и собранные вручную, но управляются также легко как Мавик.

Пока что летаем без FPV-очков, и инструкторы дают стандартные упражнения: полет вперед-назад, маневры с развернутым на 180 коптером , «квадрат»... Убедившись, что я достаточно ориентируюсь в управлении, наш инструктор переходит на задания посложнее: полет вокруг объекта, «восьмерки» и резкие повороты на большой скорости.

Спустя 20 минут пора на посадку. В первый заход мне не доверяют сажать дрон самостоятельно, инструктор аккуратно отбирает у меня пульт и выполняет снижение сам. Далее мы меняем батарейку на свежую и за стики встает следующий курсант.
Передав пульт, я встаю в сторону и наблюдаю за полетами коллег. Неподалеку от меня за коптером, как раз устремившимся на облет старой вышки в центре поля, наблюдают телевизионщики с «России 1».

Полетав еще пару-тройку сеансов, я подбиваю инструктора на мастер-класс – надеть FPV-очки и провести дрон сквозь вышку между балками. Он включает FPV, подлетает к срединной балке и аккуратно проводит квадрокоптер «навылет». Я так увлекся созерцанием процесса, что совсем забыл про фотографии, так что пруфов не будет.

После демонстрации мастерства наступает время полетать в режиме FPV для всех нас. С одной стороны, это несколько проще – при взгляде от первого лица право – всегда справа, а лево – слева. С другой, поначалу в очках совершенно не чувствуются габариты беспилотника, а еще далеко не сразу реагируешь на снос машины ветром.
После перерыва на обед мы переходим к изучению автопилота.
Конкретно мы изучаем планирование и проведение автоматических полетов с помощью Ardupilot. Он позволяет управлять автономным движением не только на квадрокоптерах, но и на других беспилотных машинах, от вездеходов до самолетных БЛА.
В итоге семинара по автопилоту мы через Mission Planner строим план полета над нашим полигоном.

Ближе к вечеру, после занятий, одна из машин Школы поднимается в воздух и успешно пролетает по заложенному маршруту.
Последний час четвертого дня курсанты тратят на знакомство с разными моделями БПЛА, в том числе самолетного типа. Лично мне больше остального интересно пронаблюдать за БПЛА с тепловизором на борту.

Такие беспилотные системы с тепловизором на борту можно использовать для промышленной инспекции кондиционеров и других нагревающихся систем в дата-центрах, особенно в труднодоступных местах, к примеру, на крыше зданий. Тепловизор конкретно этого БПЛА слабоват для таких задач, но существуют решения специально под такие условия, например, DJI Mavic 3 Thermal.

Вообще, тема инспекций объектов промышленности с помощью разного рода дронов очень актуальна. Безусловно, все объекты дата-центра, если говорить конкретно про отрасль телекома, нуждаются в техническом обслуживании. В свою очередь, процесс ТО невозможно представить без участия человека. Однако визуальная инспекция сооружений, как первичный этап технического обслуживания, может быть проведена без участия живого сотрудника при помощи дронов. Использование разного рода БПЛА для этой задачи повышает безопасность персонала, позволяет безболезненно нарастить частоту проверок (БПЛА можно поднимать в воздух хоть каждые полчаса и качество его наблюдений не зависит от усталости), а также повышает объективность контроля – на смену бумажным чек-листам приходит автоматически формируемый архив с 4К-фото состояния объекта при каждой проверке.
В перспективе, возможно, в этом блоге тема инспекции дронами ЦОДов будет освещена в отдельной статье. Так что подписывайтесь :)
День пятый. Полеты продолжаются
Последний день обучения также отведен под практические занятия. Сегодня мы летаем на стадионе «Наука» в Москве. В программе как квадрокоптеры, так и самолетные системы.

Если установился постоянный сильный ветер, следует посадить коптер, лучше всего – вернуть его в точку старта. Для этого не стоит направлять дрон в прямо противоположную ветру сторону – скорее всего, это не сработает, особенно если дрон небольшой. Попробуйте снизить высоту и идти не перпендикулярно направлению ветра, а под острым углом к нему, постепенно возвращая аппарат в точку старта не по прямой, а по дуге. Если через полминуты борьбы с ветром вы не преуспеете в движении, то лучше совершить экстренную посадку. Для этого максимально снизьтесь, наклоните нос аппарата вперед и выключите двигатели. Главное – не включать полный газ. Падение под собственным весом причинит минимально возможные повреждения, но если врезаться на полном ходу, повреждения могут быть серьезнее.
В режиме визуального пилотирования (LOS) мы летаем лишь поначалу, для разминки. Основную часть времени занимают полёты по FPV. Стадион – хорошее место для летных упражнений, потому что можно использовать ворота и разметку поля как тренажеры.
Первым упражнением мы выполняем пролет вдоль линии и обратно с приземлением в точку старта. Упражнение уже не кажется сложным: подняться в воздух, зависнуть на одной высоте, найдя стиком газа (левым) то положение, когда коптер не поднимается и не опускается, затем правым стиком плавно дать тангаж вперед и направить коптер вдоль линии. Самый сложный элемент – разворот в дальней точке.

Постепенно дело доходит до элементов посложнее: полеты вокруг стадиона на высоте и маневры вокруг элементов футбольных ворот.
С небольшими перерывами полеты продолжаются до темноты. Побочным эффектом от полетов в FPV является малое количество фотографий; поскольку я постоянно в очках, то снимать на телефон не очень удобно.
Обучение окончено! Через три недели я получил сертификат ДПО о прохождении курса:
Заключение
Не вникнувшему в тему беспилотников человеку может казаться, что БПЛА – отрасль весьма узкой специфики. Удивительно, но большинство людей ассоциирует дроны только с развлекательными полетами и видеосъемкой. Конечно, на самом деле область применения беспилотных авиационных систем намного шире. Отрасль БАС – это будущее, и её роль в жизни человека будет только расти. В связи с этим представляется интересным осваивать тематику и дальше, ведь хороший специалист по БПЛА – это перспективная профессия на стыке оператора, инженера и программиста.

