

Всем привет. Решил немного отдохнуть от гексапода и пощупать проекты с солнечными панелями. Первое, что пришло в голову — установка для автоматического позиционирования солнечных панелей (солнечный трекер). Его главная задача — выставить солнечные панели под максимально эффективным углом для получения наибольшего КПД. В этой статье мы посмотрим, как на коленке можно собрать датчик положения источника света и на его основе создать систему позиционирования. Этот проект никогда не окупится, но и не для этого он делается — мы просто развлекаемся!
Проект на GitHub.
▍ Введение
Как уже было сказано ранее, главная задача нашей системы — выставить солнечные панели под максимально эффективным углом для получения наибольшего КПД.

Статичные солнечные панели требуют предварительного анализа движения солнца для последующего их позиционирования, чтобы наибольшая часть цикла движения солнца приходилась на работу панелей. Наша установка позволяет оперативно её развернуть без необходимости подобного анализа и автоматически направить панели на солнце. Благодаря этому солнечные панели будут задействованы весь цикл движения солнца.
На самом деле при использовании солнечных панелей получить хорошие значения КПД системы невозможно из-за низкого КПД самих панелей (где-то в районе 20%, емнип). Тем не менее, постараемся выжать последние капли.
▍ Формируем требования
Т. к. проект для развлечения, то не будем выставлять какие-либо грандиозные требования. Сделаем всё просто:
- Простая конструкция.
- Самодостаточность по питанию (питает сама себя).
- 13-14 В на выходе.
По сути это тот минимум, который необходим для зарядки свинцового АКБ на 12 В.
▍ Выбор комплектующих
У нас стоит требование самодостаточности по питанию, т. е. автономность. Установка должна работать без внешнего источника питания и без АКБ, только от солнечных панелей. Исходя из этого, для перемещения по осям какие-либо сервоприводы нам не очень подходят из-за их потребления. В данном случае идеальным решением будет мотор постоянного тока с червячным редуктором. Почему именно так? А всё просто: червячный редуктор обеспечивает огромный крутящий момент и низкую скорость, что нам и нужно. Высокий крутящий момент обеспечит нам низкий ток двигателя, т. к. вращать редуктор он будет почти без напряга. К тому же, червячный редуктор обеспечивает удержание вала в одном положении (ну попробуйте провернуть червяк, будет весело :)
Я решил остановиться на таких моторах с редуктором. Питание 12В, 2 оборота в минуту. При тестировании выяснил, что они также без проблем работают при напряжении в 5В и выдают хороший крутящий момент.

Теперь давайте определимся с главным — солнечные панели. Вся наша система рассчитана на 12-13 В входного напряжения (мы же хотим свинцовый АКБ ещё заряжать), а потому выходное напряжение с панелей должно быть выше этого значения, да ещё и с запасом. Под рукой у меня оказались панели на 6 В размером 145х145. Отлично, при последовательном соединении мы получим 24 В, только ток будет маловат — 350мА.

Поделюсь небольшим опытом: не пытайтесь собрать панели из элементов своими руками — это сложно. Они очень плохо паяются, чувствительны к температурам и крайне хрупкие. Я испортил в своё время 60% элементов при сборке панели. Возьмите лучше готовые.
Мозги. Этой штукой нужно управлять. Ну я, как всегда, буду мигать светодиодом при помощи микроконтроллера с частотой 48МГц — STM32F030, даже сейчас он стоит копейки. Да, всю электронику можно собрать на рассыпухе и схем достаточно много, но я не люблю такое — 21-й век всё-таки.
▍ Датчик света
Комплектующие набрали, теперь давайте решим основную проблему: как нам определить направление солнечных лучей относительно плоскости солнечных панелей? А тут всё просто — мы используем тень.
Возьмём кусок фанеры и поставим его вертикально на какую-нибудь плоскую поверхность на улице в солнечный день. Что мы увидим? А увидим мы примерно такую картину:
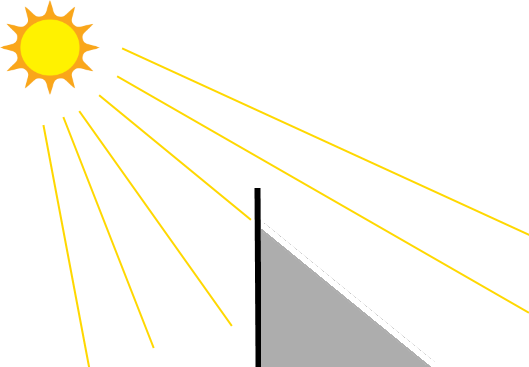
Причём в разное время суток тень будет падать под разными углами. Вращая поверхность с фанерой, можно найти то положение, при котором тень не будет падать, т. е. солнечные лучи будут падать параллельно фанере.
Давайте используем это и сделаем две таких перегородки в виде +, чтобы можно было точно понять, с какой стороны у нас солнце. Хорошо, мы-то глазами видим, а как сказать об этом микроконтроллеру? Попробуем использовать фоторезисторы. Мы просто соберём 4 делителя с фоторезисторами и по разнице их освещённости мы поймём, куда крутить плоскость с панелями. В итоге получается следующая конструкция:

Расположим этот датчик в центре сборки из панелей. Чем выше будут стенки и ближе к центру фоторезисторы, тем чувствительнее будет датчик. Мне не хотелось делать что-то сильно большое и сильно выпирающее из центра с панелями, поэтому я остановился на маленькой высоте стенок, и этого оказалось более чем достаточно.

▍ Электроника
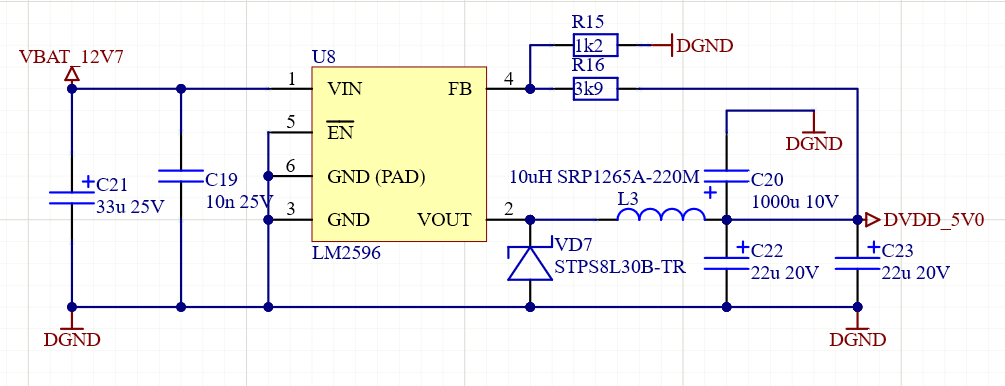
Ну тут всё просто на самом деле. На входе мы имеем 24 В, нам нужно понизить это напряжение до 13-14 В для зарядки АКБ и до 5 В для питания всей логики (MCU, драйвера). Т. к. разница между входом и выходом достаточно большая, то разумно будет использовать DC-DC. В его схеме нет ничего особенного, всё стандартно:
Моторами будем управлять при помощи драйвера MX1508. Он двухканальный и предельно простой в своём подключении. Слева сигналы от MCU, справа на моторы.

Итоговая плата выглядит так:
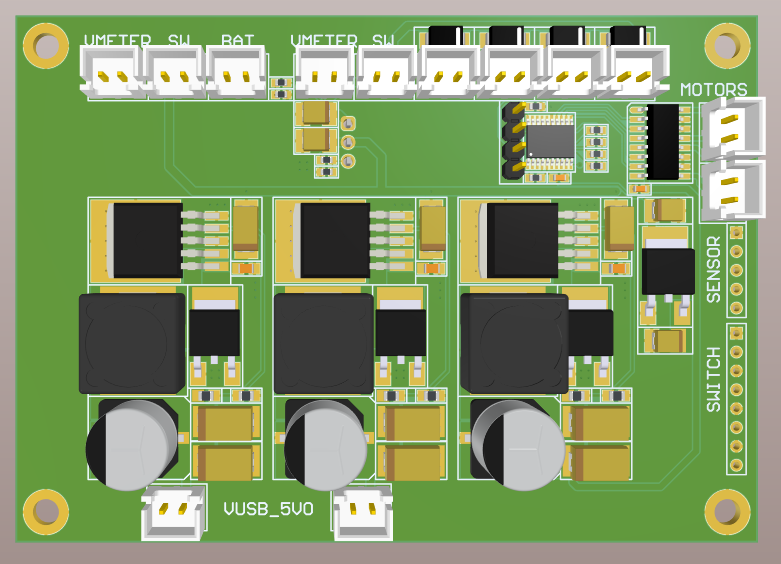
Тут я решил добавить 2 дополнительных DC-DC для USB-разъёмов, чтобы что-то можно было подключить сразу к установке, а АКБ будет в качестве резервного источника. Имеется возможность работы только от панелей (АКБ исключается из схемы). Выбор осуществляется через переключатель на блоке электроники. В целом больше ничего необычного.
Вся электроника в сборе выглядит немного страшновато, но она работает. Также имеются два вольтметра для измерения напряжения на выходе солнечных панелей и напряжения на АКБ.

▍ Соберём всё в кучу
Итоговый вариант установки выглядит следующим образом:
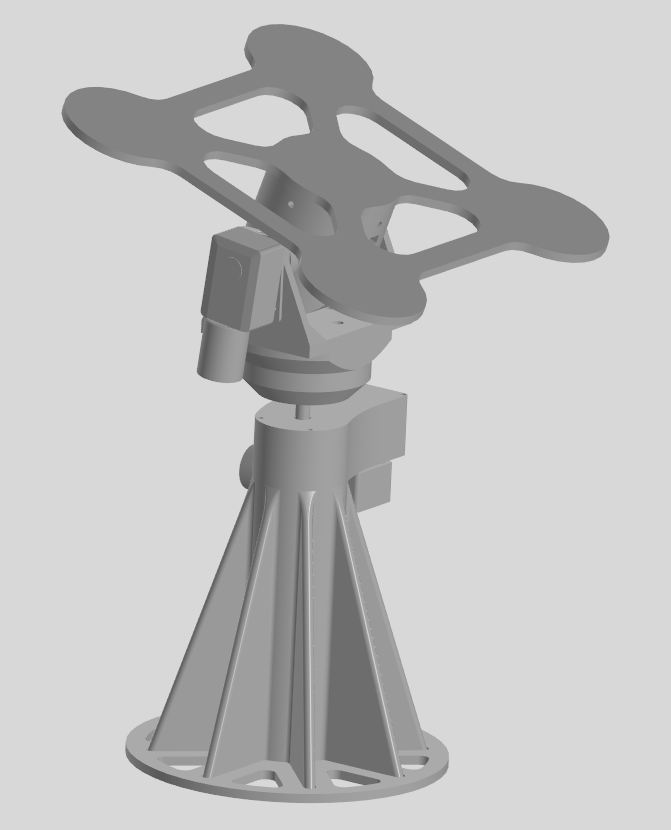
На верхнюю часть крепятся солнечные панели, закрепить их я решил при помощи двухстороннего скотча (держит очень даже неплохо, оторвать очень тяжело). Соединение панелей между собой осуществляется на плате, нам нужно просто подключить панели в соответствующие разъёмы.
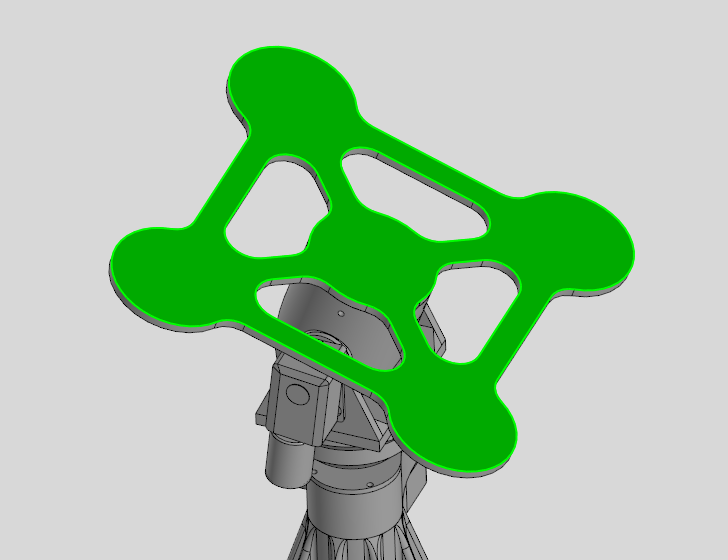
Каждая ось крепится к редуктору через переходник, который напрессовывается на вал редуктора. У наших редукторов на валу есть специальный скос, который не позволит ему проворачиваться. Сам переходник к установке прикрепляется при помощи болтов. Всё просто.

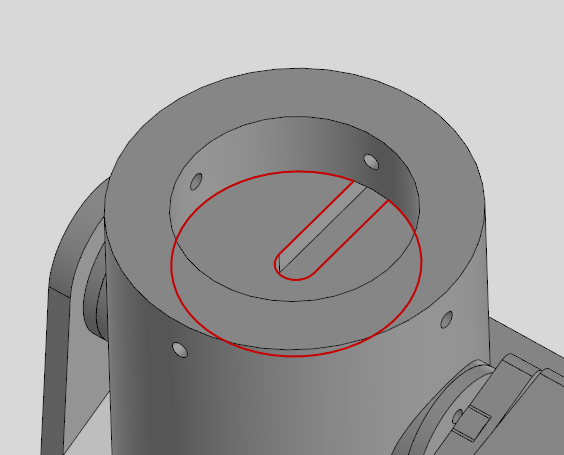
Датчик подключается тоже просто. В центре площадки для крепления панелей есть отверстие для прокладки проводов от датчика, а в её основании есть канал для выхода их в блок электроники.
Я использовал МГТФ для подключения датчика ввиду их стойкости к изгибам. Сам датчик внутри заполнен термоклеем и крепится к установке также на него. Подобные датчики плохо работают в пыльной среде из-за покрытия пылью чувствительных элементов (фоторезисторов), было бы хорошо поместить его в какой-нибудь стеклянный купол. К сожалению, у меня под рукой такого не нашлось. Для MVP сойдёт и это решение.

Сама площадка под панели крепится на двухосевую опору. Наклоном и поворотом управляют наши редукторы, которые мы выбрали чуть ранее. Всё, разумеется, на подшипниках.

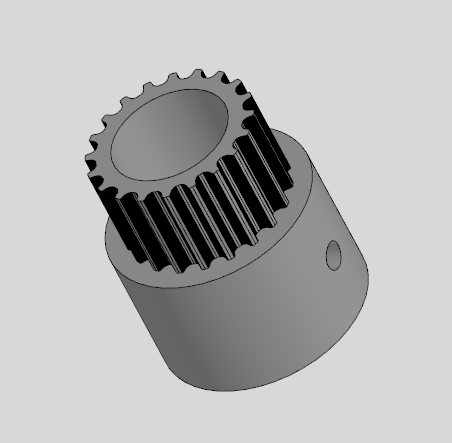
Одна из осей приводится в движение при помощи зубчатого ремня. Выбор зубчатого ремня обусловлен ошибкой на этапе проектирования. Я сделал рёбра жёсткости на основании слишком большими, и не было возможности расположить редуктор ближе к оси. Зубчатое колесо напрессовывается на вал двигателя и дополнительно фиксируется болтом М2. В месте крепления редуктора предусмотрена возможность регулировки натяжения ремня путём перемещения редуктора ближе/дальше от оси.

Ось вращения представляет собой стальную трубку, которая проходит через два подшипника в основании, чтобы минимизировать люфты. Зубчатое колесо, которое крепится на ось, имеет похожую конструкцию. Оно также фиксируется при помощи болта М2.
Всё вместе это выглядит так:

К основанию прикручены опоры, которые не дают перевернуться установке, т. к. солнечные панели хорошо работают в качестве паруса, да и центр тяжести этой установки находится в самом верху из-за расположения там редукторов. Опоры я сделал из кусков П-образного алюминиевого профиля. Просто и надёжно.

Есть ещё одна ошибка, и она заключается в том, что я расположил систему поворота по вертикальной оси на неподвижной основе. В результате у нас провода от мотора начинают наматываться на ось во время вращения > 360 градусов. К сожалению, я осознал это, когда уже всё было собрано и напечатано :-(
▍ Нюансы
Перед запуском необходимо поместить установку в помещение с равномерно распределённым освещением для калибровки датчика. Фоторезисторы и резисторы делителя напряжения имеют разные параметры. На этом этапе выполняется вычисление поправочных коэффициентов. Других подводных камней вроде нет.
▍ Итоги
Не буду голословным, просто посмотрите сами. Эту установку можно поставить на землю или закрепить на стене, она всё равно будет работать.
Что можно вынести полезного из этого проекта? Да в целом ничего нового для себя я не открыл, просто очередная поделка. Установка работает и вполне может питать внешние устройства. В режиме движения установка потребляет всего 30мА, поэтому такого маленького тока (350мА от панелей) вполне достаточно.
Telegram-канал с розыгрышами призов, новостями IT и постами о ретроиграх ?️

