Что вы делаете, когда вдруг выясняется, что задача, над которой вы работаете не имеет решения? Принципиально не имеет, можно даже не пытаться. Правильно, откладываете до лучших времён, а лучше, забываете о ней, чтоб не портить себе аппетит и психику.
Я недавно писал о манёврах в космосе, использующих гравитационную магию вместо устаревшего топлива для покорения просторов Солнечной Системы. Так вот мало того, что мы не знаем что такое гравитация, мы всё ещё не можем нормально всё посчитать.
К рубежу 19-20 веков прогрессивное человечество столкнулось с доказательством невозможности создания волшебных и точных математических формул, описывающих наше бытие. Например, к 1899 году французский математик Анри Пуанкаре доказал, что существует бесконечно много частных решений задачи трёх тел. Другими словами, существует бесконечно много разных формул, описывающих движение, например, космического тела в поле тяготения двух других. Для каждого объекта, момента времени, положения в пространстве надо всё считать отдельно, и пока считаешь, задача потеряет актуальность, комета улетит, а мы облажаемся с гравитационным манёвром и эта чёртова консервная банка с надписью NASA станет нашим гробом. А чтобы описать поведение системы множества тел, потребуется время, сопоставимое с возрастом Вселенной. Распаковывай чемоданы обратно, мы никуда не летим, дорогая.
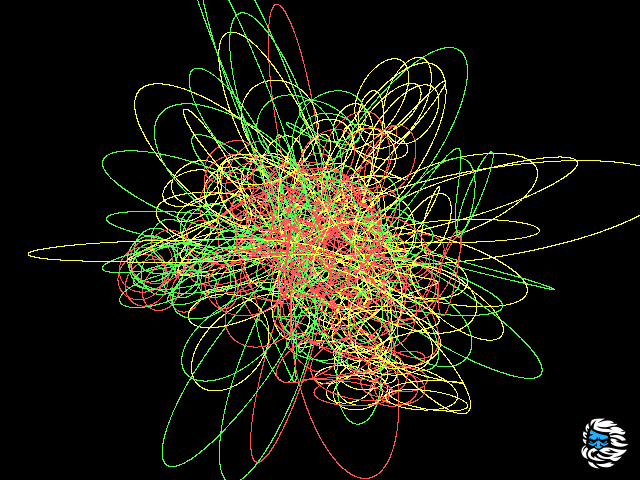
Приблизительные траектории трёх одинаковых тел, находившихся в вершинах неравнобедренного треугольника и обладавших нулевыми начальными скоростями
Однако на наше счастье помимо аналитических методов решения задач весь 19 век разрабатывались и численные методы, основанные в первую очередь на разложении неизвестных, непонятных и сложных функций на сумму известных и простых. Например, степенных или экспоненциальных полиномов. (я не силён в «матане» от слова совсем, и стало быть хватит его на сегодня). Поэтому к началу того же 20 века учёные уже определились, в каком направлении они будут искать инструменты для описания реальности, данной им вощущениях результатах наблюдений и экспериментов. Если пресловутые ряды сходятся к искомой функции, то и слава богу. За конечное время мы найдём приемлемые для нас численные значения искомых параметров исследуемого тела (например нашего космического кораблика). С этим можно работать, это уже можно посчитать, посадив 10000 сотрудников с логарифмическими линейками, например. Звучит абсурдно, но принципиально нерешаемая задача свелась к всего лишь сложной. Это был первый прорыв. Человечество, наконец, получило принципиальную возможность обуздать гравитацию, хоть и не понимая её сути.
Если честно, то на 3 курсе физического факультета я испытал настоящий экзистенциальный шок, поняв что дальше не будет «тёплых, ламповых» аналитических функций, в написании которых содержалось понимание сути явлений. А будут только эти вот бездушные ряды. «Заткнись и считай» — вот это всё. Фундаментальная наука для меня тогда закончилась, но не будем о грустном.
В первой половине 20 века практически никто не помышлял о гравитационных манёврах — во-первых, было совсем не до того, все были заняты либо войной либо подготовкой к войне. Во-вторых стремительно развивались двигатели внутреннего сгорания и только начинались попытки осмысления и применения реактивного движения. Впервые идею гравитационного манёвра высказали Фридрих Артурович Цандер и Юрий Васильевич Кондратюк еще в 1920—1930-х годах. Но это были лишь идеи — практические расчёты делать было не на чем, да и незачем.
Я не буду распространяться об истории вычислительной техники — уж тут об этом написано немало. Отмечу только, что тысячи логарифмических линеек сменили наборы реле (кратное увеличение плотности размещения и скорости обработки данных), реле сменили лампы (кратное увеличение плотности размещения и скорости обработки данных), а лампы уступили место транзисторам и интегральным микросхемам (кратное увеличение плотности размещения и скорости обработки данных). Это был второй прорыв. Принципиально нерешаемая задача свелась к всего лишь дорогой.

ЭВМ Стрела
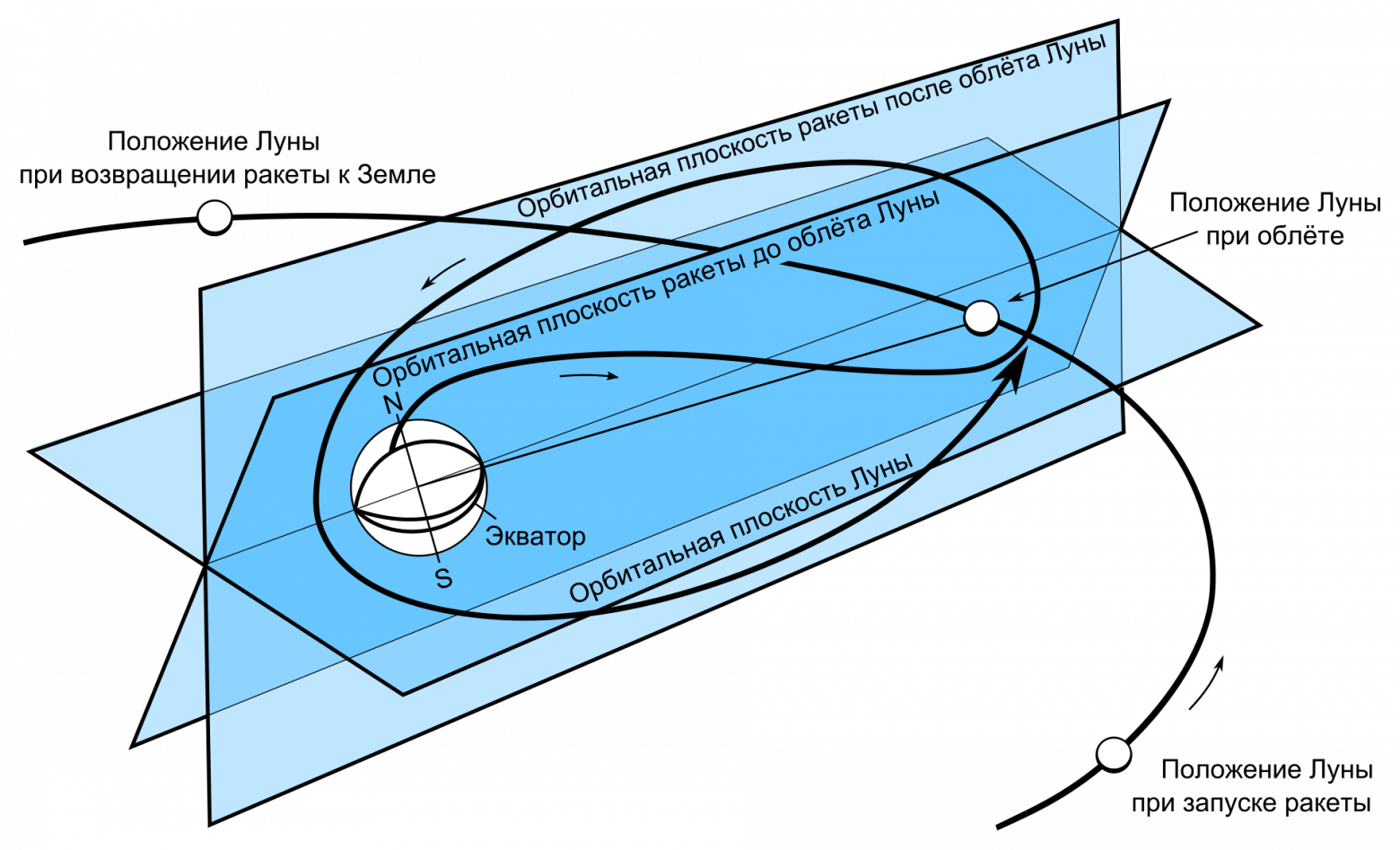
Выводу на орбиту первого искусственного спутника земли, запуску первого пилотируемого космического корабля и всем последующим пилотируемым запускам вплоть до кораблей «Союз» мы обязаны созданной в 1954 году межконтинентальной баллистической ракете Р-7 со всеми её последующими модификациями. Но без точных расчётов траектории полёта успешный запуск был бы попросту невозможен. И за эти расчеты отвечала первая в СССР серийно выпускавшаяся ЭВМ — «Стрела». Она же считала первый в истории гравитационный манёвр: облёт Луны станцией Луна-3. При кажущейся примитивности этот манёвр был уникален тем, что менял плоскость орбиты станции. В нынешнее время подобные изменения траектории также исполняются обязательно с использованием гравитации планет. Иначе бы расход топлива был бы кошмарным: на высоких скоростях (а при приближении к планете скорость максимальна) должное изменение вектора скорости можно осуществить лишь импульсом, сопоставимым с импульсом уже летящего корабля.
В дальнейшем всевозможные «руления двигателем» стали стараться выполнять при минимальных скоростях — в открытом космосе, при удалении от планет, рассчитывая дальнейшие поправки.
Летом 1961 года аспирант Калифорнийского университета в Лос-Анджелесе Майкл Минович приступил к поиску численного решения задачи трёх тел. Он использовал для этой цели принадлежащий университету IBM 7090 — мощнейший компьютер, из существовавших на тот момент. К концу лета ему удалось установить что при определённых условиях встречи с планетой, космический аппарат получает прибавку к скорости, а при других — её теряет. В ходе стажировки в Лаборатории реактивного движения (далее JPL) летом следующего года он убедил своего начальника выдать ему более точные данные положения планет, и его расчёты подтвердились.

Первый транзисторный мэйнфрейм — IBM 7090
Это был третий прорыв. Теперь ни один полёт к дальним планетам не обходился без гравитационных манёвров, нужно только посчитать. В течение десяти лет эти расчёты лягут в основу миссий Маринер-10 и аппаратов Пионер-10 и 11 — освоение Солнечной Системы началось.
В начале статьи я упомянул, что волшебных точных формул для гравитационных расчётов не существует, поэтому рассчитать, где окажется аппарат спустя месяцы, а то и годы полета, можно только сложным численным моделированием. Задаются начальное положение и скорость аппарата, определяется, как относительно него расположены планеты и какие силы действуют с их стороны. По ним рассчитывается, где окажется аппарат спустя небольшое время, скажем, спустя час, и как изменится его скорость. Затем цикл вычислений повторяется, и так шаг за шагом просчитывается вся траектория. Скорее всего, она попадет не совсем туда, куда нужно. Тогда начальные условия немного меняют и повторяют расчет, пока не будет получен требуемый результат. Как вы уже догадываетесь, при удалении корабля от матери-Земли необходимо, чтобы он мог производить необходимые расчёты «на борту» — скорость распространения радиосигнала, к сожалению, конечна, и на астрономических расстояниях задержка в получении данных и команд становится уже фатальной. Поэтому уже в 1966 году корабли миссий Gemini были оснащены бортовыми навигационными компьютерами. это позволило в данном случае астронавтам миссий получать координаты корабля, рассчитывать оптимальные места приземления и работать, когда наземная сеть передачи данных выходит за пределы орбитальной плоскости.

Бортовой навигационный компьютер для корабля Gemini-8
Но как бы тщательно ни была рассчитана траектория, ракета не сможет идеально точно вывести на нее аппарат. Поэтому с самого начала рассчитывается целый пучок слегка расходящихся траекторий — изогнутый конус, внутри которого аппарат должен оказаться после старта. Например, при полете к Венере отклонение начальной скорости от расчетной всего на 1 м/с обернется у цели промахом в 10 000 километров — больше размера планеты. Поэтому уже во время полета параметры движения аппарата уточняются по телеметрическим данным (скорость, например, до миллиметров в секунду), а затем в расчетный момент включаются двигатели и орбиты корректируются. Коррекции тоже не бесконечно точны, после каждой из них аппарат попадает в новый конус траекторий, но они не так сильно расходятся у точки назначения, поскольку часть пути уже пройдена. Если у цели аппарату предстоит гравитационный маневр, это повышает требования к точности навигации. Например, при пролете в 10 000 километрах от той же Венеры ошибка в навигации на 1000 километров приведет к тому, что после маневра станция собьется с курса примерно на градус. Исправить такое отклонение коррекционным двигателям, скорее всего, окажется не под силу.
Расходящийся конус траекторий — следствие погрешностей выведения космического аппарата
С конца 1960-х годов корабли каждой миссии были оснащены бортовыми компьютерами, обеспечивающими решение задач навигации, позиционирования и управления. В ходе каждого полёта к Луне по программе Аполлон (за исключением Аполлон-8, в составе которого не было лунного модуля) на борту командного и лунного модулей присутствовало по одному Apollo Guidance Computer. AGC командного модуля был основным вычислительным средством системы навигации и управления, а AGC лунного модуля работал со своей собственной системой управления, навигации и контроля, называвшейся PGNCS (Primary Guidance, Navigation and Control System). В программах Викинг и Вояджер использовалась дублированная вычислительная трёхмодульная система формирования и передачи телеметрии и управления системой ориентации.

Бортовая вычислительная система миссий Аполлон и человечий интерфейс управления
Однако не стоит обольщаться. Бортовые системы космических станций непригодны для детального прогнозирования поведения траекторий аппаратов в космосе. Они выполняют критически важные текущие расчёты, но обработка максимально полной информации о космической ситуации возможна лишь на Земле. Бортовые системы экономят время, но настоящая работа проводится задолго до запуска, и в дело вступают по-настоящему большие штучки наподобие UNIVAC 1108 Лаборатории Реактивного Движения Калифорнийского Технологического Института (той самой JPL). Например, ходе подготовки программы полётов кораблей миссии Вояджер были рассмотрены 10 тысяч возможных траекторий, прежде чем две из них стали утверждёнными траекториями аппаратов.
Центры управления полетами и их оборудование расположены далеко от стартовой площадки. Управление пилотируемой миссией НАСА началось в 1961 году с проекта Mercury в районе запуска мыса Канаверал, но его компьютеры находились в Центре космических полетов Годдарда недалеко от Вашингтона, округ Колумбия. С 1964 года, в начале программы Gemini, и компьютеры, и контроллеры были размещены в Космическом центр Джонсона в Хьюстоне. Беспилотные околоземные миссии НАСА в основном управляются из Центра Годдарда, при этом большинство полетов в дальний космос осуществляется через Центр космических полетов Лаборатории реактивного движения в Пасадене, Калифорния.

Система IBM 360 model 20 из Космического центра Джонсона, США. На ней установлена операционная система реального времени. Слышали про такие?
Помимо центров управления для поддержки миссий требуются многочисленные станции слежения для сбора и обработки данных телеметрии и радаров, которые помогают в мониторинге и навигации, а также для передачи команд. Эти разбросанные по нашей планете станции и центры управления связаны между собой Сетью связи НАСА (NASCOM) со штаб-квартирой в Центре Годдарда. Сеть слежения за космосом и сбора данных (STADAN) использовалась для специализации на беспилотных космических аппаратах и, объединившись с сетью пилотируемых космических полетов (MSFN) в 1972 году, стала общей сетью. Когда все спутники слежения и ретрансляции данных встали в строй, они взяли на себя большую часть пилотируемой полетной связи, но отслеживание по-прежнему остается обязанностью STADAN. Лунные и планетарные зонды являются узлами сети Deep Space Network, которая управляется тремя главными станциями в Голдстоуне, (Калифорния), Мадриде (Испания), и Канберре (Австралия), каждая с различными антеннами диаметром до 64 метров. Сеть Deep Space Network помогла в пилотируемых лунных миссиях, когда космический корабль «Аполлон» прошел в десятке тысяч километрах от Земли.

Глобальная сеть STADAN
Планируя компьютерное обеспечение для бортовых систем Вояджера, в JPL обнаружили, что функционально распределенные «маленькие» компьютеры предлагали более высокую надежность и экономию, чем огромные однопроцессорные системы. Лаборатория внедрила распределенную систему для удовлетворения своих потребностей в наземном управлении Вояджером. Викинг был последней миссией, которую поддерживал большой мэйнфрейм. Когда миссии приближались к критическим фазам, таким как запуск или подлёт к планете, программное обеспечение всего процессорного блока приходилось замораживать до тех пор, пока фаза не прошла. И с увеличением числа космических кораблей, время, доступное для изменения программного обеспечения, стало весьма малым. В распределенной же системе можно было вносить изменения, не затрагивая другое программное обеспечение.
К началу 1980-х годов сеть Deep Space Network активно использовала распределенные вычисления. Она инициировала внедрение систем ModComp 2 на станциях слежения и заказала три суперминикомпьютера Digital Equipment Corporation 11/780 VAK компании Digital Equipment Corporation (DEC) для использования в JPL. Около 100 миникомпьютеров были подключены к сети Ethernet. Использование языков высокого уровня стало скорее правилом, чем исключением. Наступила эра кластерных вычислений.
VAX-кластер представляет собой слабосвязанную многомашинную систему с общей внешней памятью, обеспечивающую единый механизм управления и администрирования
Первый кластерный проект — Beowulf возник в научно-космическом центре NASA, в Годдарде (GSFC), точнее в созданном на его основе CESDIS (Center of Excellence in Space Data and Information Sciences). Этот проект стартанул летом 1994 года сборкой в 16-процессорного кластера (на процессорах 486DX4/100MHz, 16MB памяти и 3 сетевых адаптера на каждом узле, 3 «параллельных» Ethernet-кабеля по 10Mbit). Данный кластер, который и был назван «Beowulf», создавался как вычислительный ресурс проекта Earth and Space Sciences Project (ESS).
Далее в GSFC и других подразделениях NASA были собраны другие, более мощные кластеры. Например, TheHIVE (64 узла по 2 процессора Pentium Pro/200MHz и 4GB памяти в каждом, 5 коммутаторов Fast Ethernet ), Avalon в Лос-Аламосе на базе процессоров DEC Alpha/533MHz, 512-процессорный супер-кластер LosLobos в Альбукерке (256 двухпроцессорных серверов IBM Netfinity с процессорами Intel Pentium III/733 MHz).
Эти и другие кластеры помимо прочего позволили собирать модели движения космических аппаратов, учитывая всё более увеличивающиеся объёмы данных о Солнечной системе. К тому же тренд на стандартизацию оборудования, заданный НАСА ещё в середине 1980-х годов, принёс дополнительные плоды. С развитием сетей передачи данных, и, разумеется, Интернет появилась возможность (теоретически) объединять в расчётные проекты практически неограниченные ресурсы пользователей по всему миру. Ну или по крайней мере консолидировать усилия большого количества университетских вычислительных центров.
С увеличением доступных вычислительных мощностей появилась возможность не только накапливать и обрабатывать наблюдения за космическими объектами, но и симулировать их поведение и строить модели планетных систем в целом. В конце 1990-х в Токийском Университете была анонсирована и запущена инновационная архитектура суперкомпьютеров GRAPE (Gravity Pipe). GRAPE помогает в расчетах взаимодействий между частицами и телами, где взаимодействие масштабируется как x -2. Эта зависимость является аппаратной, что значительно сокращает время вычислений. К нынешнему времени работает уже шестое поколение этой архитектуры и в 2005 году в Центре вычислительной теории относительности и гравитации (CCRG) при Рочестерском Технологическом Институте вступил в строй новый расчётный суперкластер GRAPE-6. Он способен управиться с расчётами одновременного поведения 4 миллионов гравитирующих частиц с устойчивой скоростью расчётов 4 Тфлопс. Основная его задача — изучения динамической эволюции гравитирующих систем вплоть до галактик.

Гравитационный симулятор в CCRG
Подобные вычислительные комплексы открывают перед человечеством возможность предварительных расчётов траекторий космических аппаратов с учётом всех открытых на сегодняшний день объектов Солнечной системы включая астероиды. А там и до «гравитационного» расписания полётов недалеко. По крайней мере новости об открытии «скоростных гравитационных шоссе» уже мелькают.
VDS серверы от Маклауд быстрые и безопасные.
Зарегистрируйтесь по ссылке выше или кликнув на баннер и получите 10% скидку на первый месяц аренды сервера любой конфигурации!

Я недавно писал о манёврах в космосе, использующих гравитационную магию вместо устаревшего топлива для покорения просторов Солнечной Системы. Так вот мало того, что мы не знаем что такое гравитация, мы всё ещё не можем нормально всё посчитать.
К рубежу 19-20 веков прогрессивное человечество столкнулось с доказательством невозможности создания волшебных и точных математических формул, описывающих наше бытие. Например, к 1899 году французский математик Анри Пуанкаре доказал, что существует бесконечно много частных решений задачи трёх тел. Другими словами, существует бесконечно много разных формул, описывающих движение, например, космического тела в поле тяготения двух других. Для каждого объекта, момента времени, положения в пространстве надо всё считать отдельно, и пока считаешь, задача потеряет актуальность, комета улетит, а мы облажаемся с гравитационным манёвром и эта чёртова консервная банка с надписью NASA станет нашим гробом. А чтобы описать поведение системы множества тел, потребуется время, сопоставимое с возрастом Вселенной. Распаковывай чемоданы обратно, мы никуда не летим, дорогая.
Приблизительные траектории трёх одинаковых тел, находившихся в вершинах неравнобедренного треугольника и обладавших нулевыми начальными скоростями
Как считаем
Однако на наше счастье помимо аналитических методов решения задач весь 19 век разрабатывались и численные методы, основанные в первую очередь на разложении неизвестных, непонятных и сложных функций на сумму известных и простых. Например, степенных или экспоненциальных полиномов. (я не силён в «матане» от слова совсем, и стало быть хватит его на сегодня). Поэтому к началу того же 20 века учёные уже определились, в каком направлении они будут искать инструменты для описания реальности, данной им в
Если честно, то на 3 курсе физического факультета я испытал настоящий экзистенциальный шок, поняв что дальше не будет «тёплых, ламповых» аналитических функций, в написании которых содержалось понимание сути явлений. А будут только эти вот бездушные ряды. «Заткнись и считай» — вот это всё. Фундаментальная наука для меня тогда закончилась, но не будем о грустном.
В первой половине 20 века практически никто не помышлял о гравитационных манёврах — во-первых, было совсем не до того, все были заняты либо войной либо подготовкой к войне. Во-вторых стремительно развивались двигатели внутреннего сгорания и только начинались попытки осмысления и применения реактивного движения. Впервые идею гравитационного манёвра высказали Фридрих Артурович Цандер и Юрий Васильевич Кондратюк еще в 1920—1930-х годах. Но это были лишь идеи — практические расчёты делать было не на чем, да и незачем.
Я не буду распространяться об истории вычислительной техники — уж тут об этом написано немало. Отмечу только, что тысячи логарифмических линеек сменили наборы реле (кратное увеличение плотности размещения и скорости обработки данных), реле сменили лампы (кратное увеличение плотности размещения и скорости обработки данных), а лампы уступили место транзисторам и интегральным микросхемам (кратное увеличение плотности размещения и скорости обработки данных). Это был второй прорыв. Принципиально нерешаемая задача свелась к всего лишь дорогой.
ЭВМ Стрела
Выводу на орбиту первого искусственного спутника земли, запуску первого пилотируемого космического корабля и всем последующим пилотируемым запускам вплоть до кораблей «Союз» мы обязаны созданной в 1954 году межконтинентальной баллистической ракете Р-7 со всеми её последующими модификациями. Но без точных расчётов траектории полёта успешный запуск был бы попросту невозможен. И за эти расчеты отвечала первая в СССР серийно выпускавшаяся ЭВМ — «Стрела». Она же считала первый в истории гравитационный манёвр: облёт Луны станцией Луна-3. При кажущейся примитивности этот манёвр был уникален тем, что менял плоскость орбиты станции. В нынешнее время подобные изменения траектории также исполняются обязательно с использованием гравитации планет. Иначе бы расход топлива был бы кошмарным: на высоких скоростях (а при приближении к планете скорость максимальна) должное изменение вектора скорости можно осуществить лишь импульсом, сопоставимым с импульсом уже летящего корабля.
В дальнейшем всевозможные «руления двигателем» стали стараться выполнять при минимальных скоростях — в открытом космосе, при удалении от планет, рассчитывая дальнейшие поправки.
Летом 1961 года аспирант Калифорнийского университета в Лос-Анджелесе Майкл Минович приступил к поиску численного решения задачи трёх тел. Он использовал для этой цели принадлежащий университету IBM 7090 — мощнейший компьютер, из существовавших на тот момент. К концу лета ему удалось установить что при определённых условиях встречи с планетой, космический аппарат получает прибавку к скорости, а при других — её теряет. В ходе стажировки в Лаборатории реактивного движения (далее JPL) летом следующего года он убедил своего начальника выдать ему более точные данные положения планет, и его расчёты подтвердились.
Первый транзисторный мэйнфрейм — IBM 7090
Это был третий прорыв. Теперь ни один полёт к дальним планетам не обходился без гравитационных манёвров, нужно только посчитать. В течение десяти лет эти расчёты лягут в основу миссий Маринер-10 и аппаратов Пионер-10 и 11 — освоение Солнечной Системы началось.
В начале статьи я упомянул, что волшебных точных формул для гравитационных расчётов не существует, поэтому рассчитать, где окажется аппарат спустя месяцы, а то и годы полета, можно только сложным численным моделированием. Задаются начальное положение и скорость аппарата, определяется, как относительно него расположены планеты и какие силы действуют с их стороны. По ним рассчитывается, где окажется аппарат спустя небольшое время, скажем, спустя час, и как изменится его скорость. Затем цикл вычислений повторяется, и так шаг за шагом просчитывается вся траектория. Скорее всего, она попадет не совсем туда, куда нужно. Тогда начальные условия немного меняют и повторяют расчет, пока не будет получен требуемый результат. Как вы уже догадываетесь, при удалении корабля от матери-Земли необходимо, чтобы он мог производить необходимые расчёты «на борту» — скорость распространения радиосигнала, к сожалению, конечна, и на астрономических расстояниях задержка в получении данных и команд становится уже фатальной. Поэтому уже в 1966 году корабли миссий Gemini были оснащены бортовыми навигационными компьютерами. это позволило в данном случае астронавтам миссий получать координаты корабля, рассчитывать оптимальные места приземления и работать, когда наземная сеть передачи данных выходит за пределы орбитальной плоскости.
Бортовой навигационный компьютер для корабля Gemini-8
Но как бы тщательно ни была рассчитана траектория, ракета не сможет идеально точно вывести на нее аппарат. Поэтому с самого начала рассчитывается целый пучок слегка расходящихся траекторий — изогнутый конус, внутри которого аппарат должен оказаться после старта. Например, при полете к Венере отклонение начальной скорости от расчетной всего на 1 м/с обернется у цели промахом в 10 000 километров — больше размера планеты. Поэтому уже во время полета параметры движения аппарата уточняются по телеметрическим данным (скорость, например, до миллиметров в секунду), а затем в расчетный момент включаются двигатели и орбиты корректируются. Коррекции тоже не бесконечно точны, после каждой из них аппарат попадает в новый конус траекторий, но они не так сильно расходятся у точки назначения, поскольку часть пути уже пройдена. Если у цели аппарату предстоит гравитационный маневр, это повышает требования к точности навигации. Например, при пролете в 10 000 километрах от той же Венеры ошибка в навигации на 1000 километров приведет к тому, что после маневра станция собьется с курса примерно на градус. Исправить такое отклонение коррекционным двигателям, скорее всего, окажется не под силу.
Расходящийся конус траекторий — следствие погрешностей выведения космического аппарата
С конца 1960-х годов корабли каждой миссии были оснащены бортовыми компьютерами, обеспечивающими решение задач навигации, позиционирования и управления. В ходе каждого полёта к Луне по программе Аполлон (за исключением Аполлон-8, в составе которого не было лунного модуля) на борту командного и лунного модулей присутствовало по одному Apollo Guidance Computer. AGC командного модуля был основным вычислительным средством системы навигации и управления, а AGC лунного модуля работал со своей собственной системой управления, навигации и контроля, называвшейся PGNCS (Primary Guidance, Navigation and Control System). В программах Викинг и Вояджер использовалась дублированная вычислительная трёхмодульная система формирования и передачи телеметрии и управления системой ориентации.
Бортовая вычислительная система миссий Аполлон и человечий интерфейс управления
Однако не стоит обольщаться. Бортовые системы космических станций непригодны для детального прогнозирования поведения траекторий аппаратов в космосе. Они выполняют критически важные текущие расчёты, но обработка максимально полной информации о космической ситуации возможна лишь на Земле. Бортовые системы экономят время, но настоящая работа проводится задолго до запуска, и в дело вступают по-настоящему большие штучки наподобие UNIVAC 1108 Лаборатории Реактивного Движения Калифорнийского Технологического Института (той самой JPL). Например, ходе подготовки программы полётов кораблей миссии Вояджер были рассмотрены 10 тысяч возможных траекторий, прежде чем две из них стали утверждёнными траекториями аппаратов.
Распределённые вычисления и бигдата
Центры управления полетами и их оборудование расположены далеко от стартовой площадки. Управление пилотируемой миссией НАСА началось в 1961 году с проекта Mercury в районе запуска мыса Канаверал, но его компьютеры находились в Центре космических полетов Годдарда недалеко от Вашингтона, округ Колумбия. С 1964 года, в начале программы Gemini, и компьютеры, и контроллеры были размещены в Космическом центр Джонсона в Хьюстоне. Беспилотные околоземные миссии НАСА в основном управляются из Центра Годдарда, при этом большинство полетов в дальний космос осуществляется через Центр космических полетов Лаборатории реактивного движения в Пасадене, Калифорния.
Система IBM 360 model 20 из Космического центра Джонсона, США. На ней установлена операционная система реального времени. Слышали про такие?
Помимо центров управления для поддержки миссий требуются многочисленные станции слежения для сбора и обработки данных телеметрии и радаров, которые помогают в мониторинге и навигации, а также для передачи команд. Эти разбросанные по нашей планете станции и центры управления связаны между собой Сетью связи НАСА (NASCOM) со штаб-квартирой в Центре Годдарда. Сеть слежения за космосом и сбора данных (STADAN) использовалась для специализации на беспилотных космических аппаратах и, объединившись с сетью пилотируемых космических полетов (MSFN) в 1972 году, стала общей сетью. Когда все спутники слежения и ретрансляции данных встали в строй, они взяли на себя большую часть пилотируемой полетной связи, но отслеживание по-прежнему остается обязанностью STADAN. Лунные и планетарные зонды являются узлами сети Deep Space Network, которая управляется тремя главными станциями в Голдстоуне, (Калифорния), Мадриде (Испания), и Канберре (Австралия), каждая с различными антеннами диаметром до 64 метров. Сеть Deep Space Network помогла в пилотируемых лунных миссиях, когда космический корабль «Аполлон» прошел в десятке тысяч километрах от Земли.
Глобальная сеть STADAN
Планируя компьютерное обеспечение для бортовых систем Вояджера, в JPL обнаружили, что функционально распределенные «маленькие» компьютеры предлагали более высокую надежность и экономию, чем огромные однопроцессорные системы. Лаборатория внедрила распределенную систему для удовлетворения своих потребностей в наземном управлении Вояджером. Викинг был последней миссией, которую поддерживал большой мэйнфрейм. Когда миссии приближались к критическим фазам, таким как запуск или подлёт к планете, программное обеспечение всего процессорного блока приходилось замораживать до тех пор, пока фаза не прошла. И с увеличением числа космических кораблей, время, доступное для изменения программного обеспечения, стало весьма малым. В распределенной же системе можно было вносить изменения, не затрагивая другое программное обеспечение.
К началу 1980-х годов сеть Deep Space Network активно использовала распределенные вычисления. Она инициировала внедрение систем ModComp 2 на станциях слежения и заказала три суперминикомпьютера Digital Equipment Corporation 11/780 VAK компании Digital Equipment Corporation (DEC) для использования в JPL. Около 100 миникомпьютеров были подключены к сети Ethernet. Использование языков высокого уровня стало скорее правилом, чем исключением. Наступила эра кластерных вычислений.
VAX-кластер представляет собой слабосвязанную многомашинную систему с общей внешней памятью, обеспечивающую единый механизм управления и администрирования
Первый кластерный проект — Beowulf возник в научно-космическом центре NASA, в Годдарде (GSFC), точнее в созданном на его основе CESDIS (Center of Excellence in Space Data and Information Sciences). Этот проект стартанул летом 1994 года сборкой в 16-процессорного кластера (на процессорах 486DX4/100MHz, 16MB памяти и 3 сетевых адаптера на каждом узле, 3 «параллельных» Ethernet-кабеля по 10Mbit). Данный кластер, который и был назван «Beowulf», создавался как вычислительный ресурс проекта Earth and Space Sciences Project (ESS).
Далее в GSFC и других подразделениях NASA были собраны другие, более мощные кластеры. Например, TheHIVE (64 узла по 2 процессора Pentium Pro/200MHz и 4GB памяти в каждом, 5 коммутаторов Fast Ethernet ), Avalon в Лос-Аламосе на базе процессоров DEC Alpha/533MHz, 512-процессорный супер-кластер LosLobos в Альбукерке (256 двухпроцессорных серверов IBM Netfinity с процессорами Intel Pentium III/733 MHz).
Эти и другие кластеры помимо прочего позволили собирать модели движения космических аппаратов, учитывая всё более увеличивающиеся объёмы данных о Солнечной системе. К тому же тренд на стандартизацию оборудования, заданный НАСА ещё в середине 1980-х годов, принёс дополнительные плоды. С развитием сетей передачи данных, и, разумеется, Интернет появилась возможность (теоретически) объединять в расчётные проекты практически неограниченные ресурсы пользователей по всему миру. Ну или по крайней мере консолидировать усилия большого количества университетских вычислительных центров.
С увеличением доступных вычислительных мощностей появилась возможность не только накапливать и обрабатывать наблюдения за космическими объектами, но и симулировать их поведение и строить модели планетных систем в целом. В конце 1990-х в Токийском Университете была анонсирована и запущена инновационная архитектура суперкомпьютеров GRAPE (Gravity Pipe). GRAPE помогает в расчетах взаимодействий между частицами и телами, где взаимодействие масштабируется как x -2. Эта зависимость является аппаратной, что значительно сокращает время вычислений. К нынешнему времени работает уже шестое поколение этой архитектуры и в 2005 году в Центре вычислительной теории относительности и гравитации (CCRG) при Рочестерском Технологическом Институте вступил в строй новый расчётный суперкластер GRAPE-6. Он способен управиться с расчётами одновременного поведения 4 миллионов гравитирующих частиц с устойчивой скоростью расчётов 4 Тфлопс. Основная его задача — изучения динамической эволюции гравитирующих систем вплоть до галактик.
Гравитационный симулятор в CCRG
Подобные вычислительные комплексы открывают перед человечеством возможность предварительных расчётов траекторий космических аппаратов с учётом всех открытых на сегодняшний день объектов Солнечной системы включая астероиды. А там и до «гравитационного» расписания полётов недалеко. По крайней мере новости об открытии «скоростных гравитационных шоссе» уже мелькают.
VDS серверы от Маклауд быстрые и безопасные.
Зарегистрируйтесь по ссылке выше или кликнув на баннер и получите 10% скидку на первый месяц аренды сервера любой конфигурации!
