Это видео где Marc Raibert основатель Boston Dynamics рассказывает про роботов: BigDog, Spot, SpotMini, Atlas. На основании этого видео и других видео где выступал Marc, я опишу кратко технологии роботов и дальнейшие планы компании.
Marc Raibert основал компанию Boston Dynamics 25 лет назад, но она еще не выпускала своих роботов в производство. Объясняет это основатель тем что компания работала все это время на опережающее развитие за горизонтом возможностей текущей робототехники. Тем не менее в своих роботах компания достигла того уровня когда стало возможным сделать небольшого электрического робота на четырех ногах способного автономно передвигаться по пересеченной местности и зданиях. Поэтому они собираются начать массовое производство робота SpotMini в середине 2019 года в количестве 1000 штук в год.
На данный момент уже 10 роботов испытывают потенциальные заказчики, еще 100 будет поставлено в течении года для тестов.
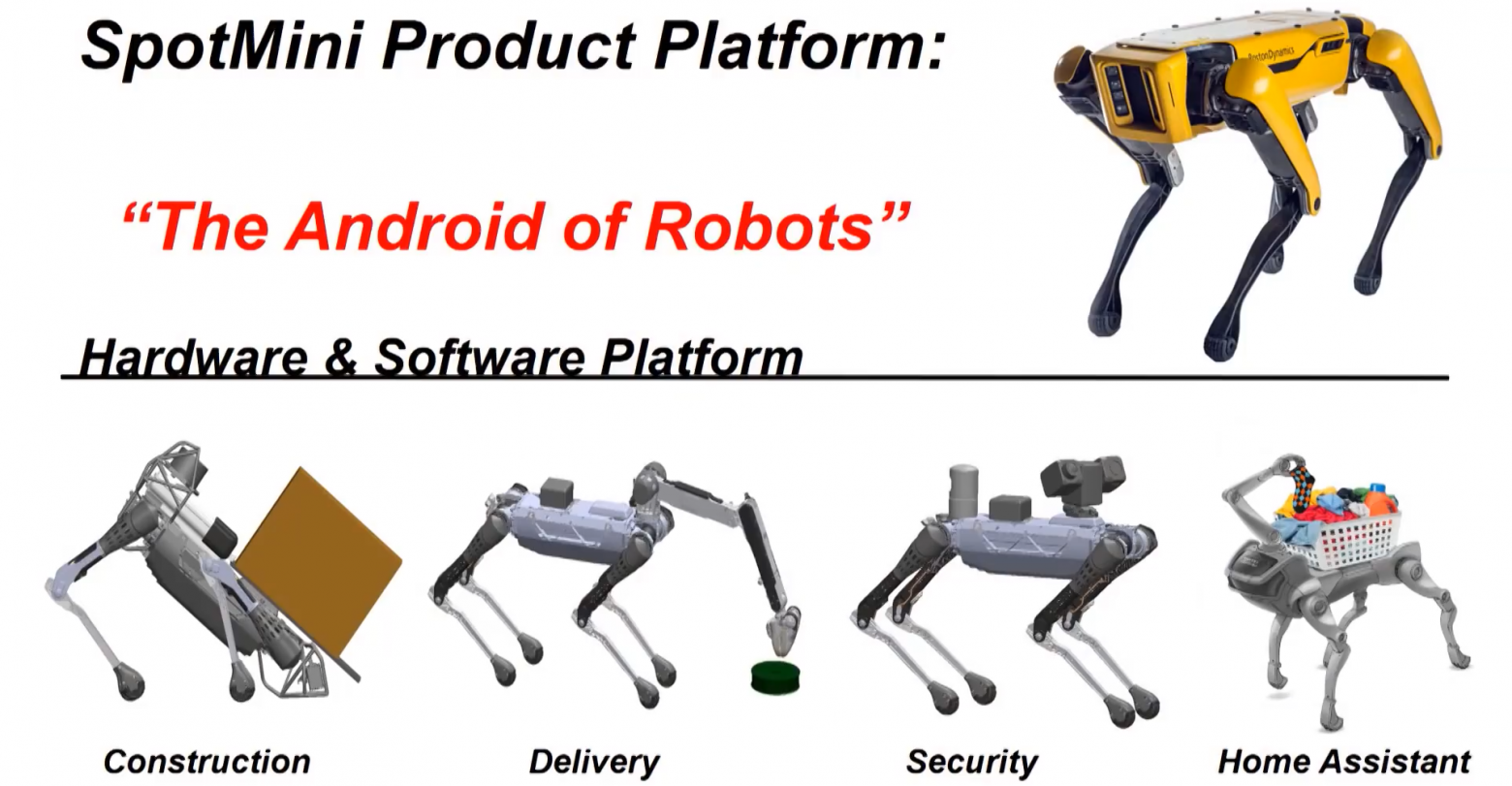
Робот будет продаваться как платформа на которую можно установить руку. У него есть API с помощью которого сторонние разработчики смогут писать свои приложения и пользоваться основным функционалом робота. В видео есть несколько демонстраций таких приложений.
Подразумевается что Boston Dinamics заложила базовый функционал в робота и оператору робота или стороннему разработчику можно отдавать только высокоуровневые команды типа иди туда с такой то скоростью, подай банку с колой.
Marc заявляет что робот может действовать рядом с человеком и по сути является коллаборативным, что он обосновывает в видео тем что робот весит всего лишь 27 килограмм и по этому не может причинить вреда человеку.
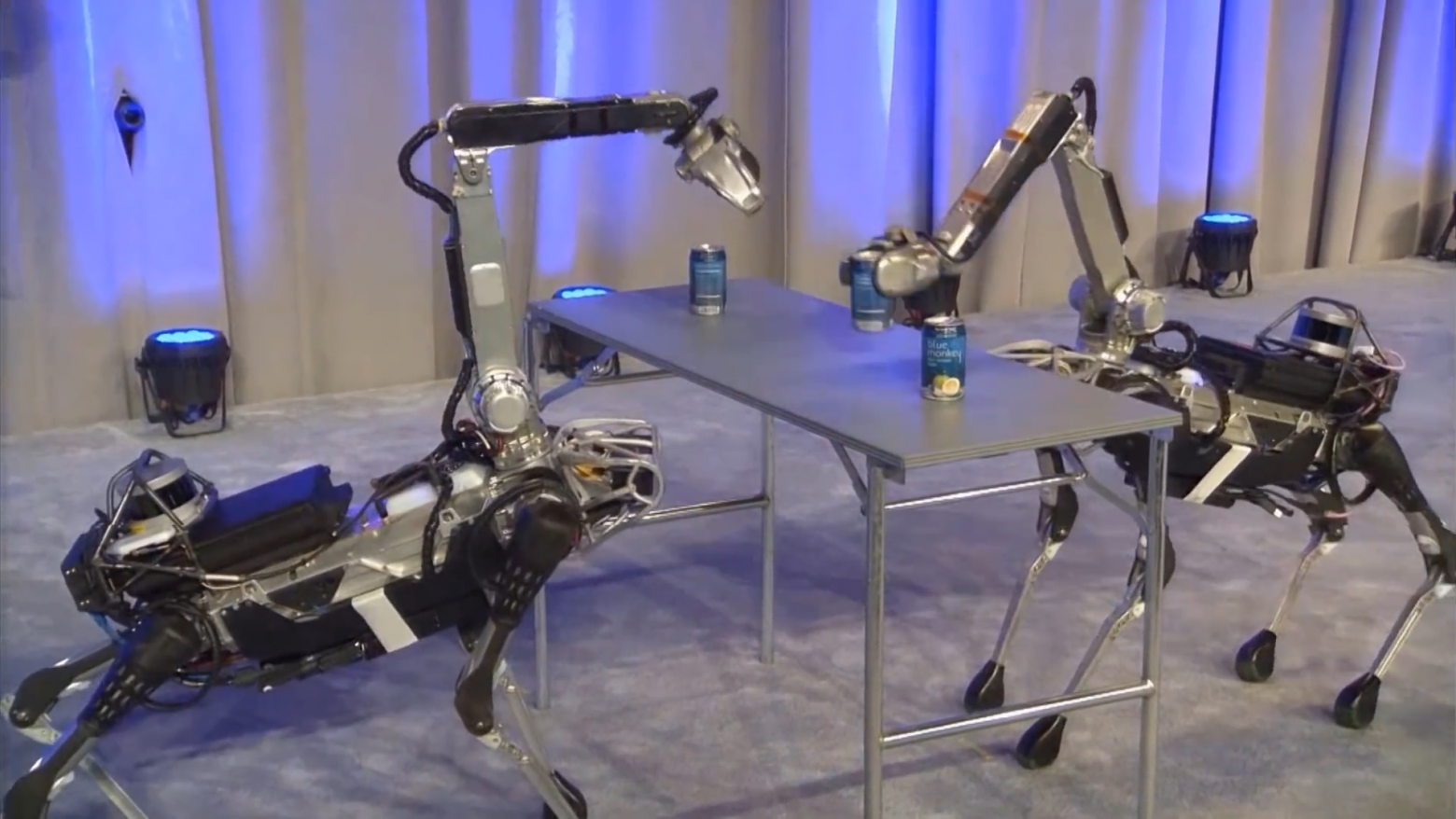
SpotMini умеет обнаруживать банку с колой, захватывать и переносить в другое место или отдавать людям. На фото выше как раз пример приложения для робота которое выполняет такую задачу.
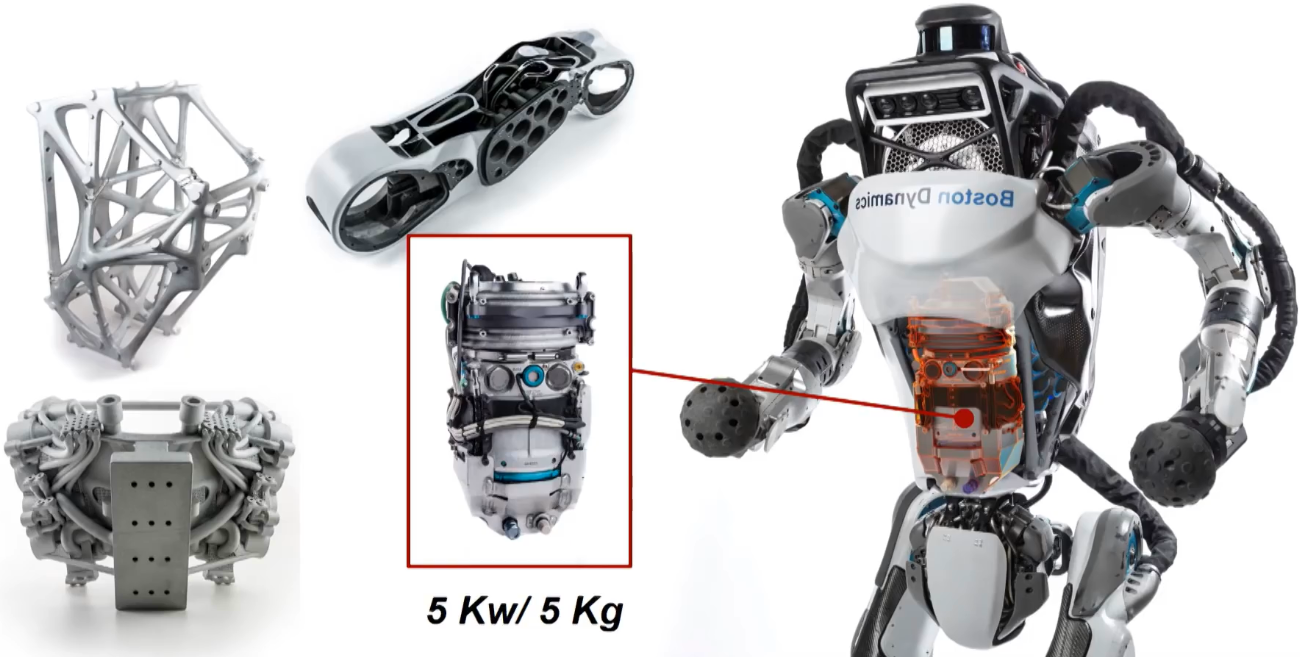
Также интересен рассказ про технологии примененные в роботе Atlas. Первоначальный вес робота удалось снизить с 170 килограмм до 75 при той же энерговооруженности. При этом робот стал гораздо проворнее и способнее. Этого удалось добиться за счет новых методов конструирования и 3d печати. В видео показывается нога робота напечатанная на принтере, которая весит в разы меньше при той же прочности.
Особенно стоит отметить про энергетическую установку. В видео Marc говорит что им удалось уместить в нее: двигатель, насос, фильтр, коллектор и тепловую рубашку с аккумулятором в живот робота, при этом вес всей этой конструкции составил 5 килограмм при мощности 5 киловатт. Опять же он говорит что это было бы не возможно без передовых методов проектирования и 3D печати.


В другом видео он рассказывает про робота Handle, он планируется как логистический робот способный переносить грузы быстро на дальние расстояния, так как вместо ног у него колеса.
Небольшой реверс инжиниринг от меня:

В видео Marc Raibert говорит что в роботе используется 5 модулей камер, две спереди и по одной слева, справа и сзади. От лазерного лидара они по видимому в коммерческой версии отказались. На фото видно что модуль камер какой то не стандартный, всего можно разглядеть 5 камер в модуле, возможно несколько из них это инфракрасная камера с приемником. Также видно что две камеры мелкие и как бы под углом друг к другу. Если кто то знает что это за модуль напишите в комментариях. Из всего этого можно сделать вывод что робот обходиться только стерео камерами, возможно с инфракрасной камерой глубины. Алгоритм позиционирования и локализации скорее всего визуальный SLAM, какой не понятно. Вообще компания Boston Dinamics довольно закрыта и мало рассказывает о программном обеспечении своих роботов, но на форумах люди в ней работавшие пишут что у них свой проприетарный код, в основном на C++ и немного на Python. Есть упоминание о использовании Drake. Возможно в роботе Atlas на соревнованиях частично использовался ROS.
По механике и расчету движения конечностей роботов, исследования Marc Raibertа тянуться со времен основания им лаборатории по движению ног в 1980 году и написанием книги Legged Robots that Balance в 1986 году. Также из исследований MIT которые я описывал в прошлой статье по слепому роботу гепарду можно сделать вывод что похожие методы используются и в SpotMini так как Marc Raibert был профессором в MIT.
По сути это будет первый достаточно функциональный и сложный робот который будет повседневно использоваться рядом с человеком. Пока он умеет только хватать банку с колой и женские сумки, то ли еще будет: )

