Зачастую при поиске движущихся объектов на видео будь то методом вычитания фона, временной разности, оптического потока, в итоге мы получаем множество точек, которые после действия вышеупомянутых алгоритмов помечены как изменившие свое положение относительно предыдущего кадра и относящиеся к переднему плану.

После такой обработки встает вопрос о сегментации объектов методом кластерного анализа, о котором пойдет речь ниже и собственно его реализация на C++.
Для начала немного теории:
Сегментация — это процесс разделения цифрового изображения на несколько сегментов (множеств пикселей). Проще говоря, это вещь, которая позволяет определить какие пиксели из данного множества относятся к Ferrari, а какие к Peugeot.
Очень эффективным с точки зрения вычислительных ресурсов является использование для сегментации методов кластерного анализа. Суть кластеризации состоит в том, что все исходные объекты (в данном случае пиксели ) разбиваются на несколько не пересекающихся групп таким образом, чтобы объекты, попавшие в одну группу, имели сходные характеристики, в то время как у объектов из разных групп эти характеристики должны значительно отличаться. Полученные группы называются кластерами. Исходными значениями в простейшем способе для кластеризации являются координаты пикселя (x, y), в более сложных случаях, например для полутоновых изображений, используется трехмерный вектор (x, y, I(x, y) ), где I(x, y) — градации серого
и пятимерный вектор если используется RGB.
Центроид — точка которая является центром кластера.
k-средних (k-means) — наиболее популярный метод кластеризации. Алгоритму широко отдается предпочтение из-за его простоты реализации, большой скорости (а это очень важно при работе с видео).
Действие алгоритма таково, что он стремится минимизировать суммарное квадратичное отклонение точек кластеров от центров этих кластеров. В простонародье говоря, это итеративный алгоритм, который делит данное множество пикселей на k кластеров точки, которых являются максимально приближенными к их центрам, а сама кластеризация происходит за счет смещения этих же центров. Такой себе принцип разделяй и властвуй.
Также следует оговорить то, что метод к-средних очень чувствительный к шуму, который может существенно исказить результаты кластеризации.Так что в идеале, перед кластеризацией, нужно прогнать кадры через фильтры предназначиные для его уменьшения.
Вот собственно сам принцип простейшей кластеризации методом к-средних:
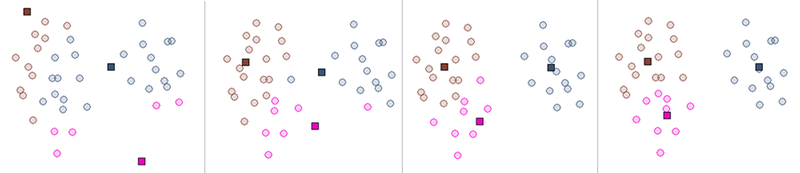
Вот картинка, которая приблизительно демонстрируют работу алгоритма:
Вот неплохой апплет для иллюстрации работы алгоритма к-средних
Для начала нам нужен класс, назовем его Cluster, который будет хранить вектор координат пикселей относящихся к кластеру, текущие и предыдущие значения координат центроида:
Теперь нам надо реализовать метод которой будет распределять начальные координаты центроидов. Можно конечно сделать чего-нибудь по сложнее, но в нашем случае сойдет и равномерное распределение по вектору:
Также нужно написать метод, который будет ответственный за нахождение новых координат центроида в соответствии с пунктом 5.Координаты нового центроида можно найти описав вокруг пикселей кластера прямоугольник и тогда центроидом будет пересечение его диагоналей.
И теперь только остался сделать простенький метод самого «привязывания» пикселей к определенному кластеру по принципу сравнения модулей отрезков:
И наконец главный цикл:
Вернемся к картинке с машинами, кластеризуя движущиеся объекты возникает проблема при использовании алгоритма к-средних, а именно мы не знаем сколько в данной сцене будет движущихся объектов, хотя можем приблизительно предугадать. Например кадр с машинами, на той сцене разумным будет предположить, что ну максимум там будет машин 10. Таким образом задавая на вход программе k = 10 и обведя точки 10 кластеров зелеными прямоугольниками, мы получим примерно следующую картину:

Теперь банально объеденив пересекающиеся прямоугольники, мы находим результирующие кластеры, обведя которые прямоугольником мы получим изображение преведенное в начале поста.Все просто.
После такой обработки встает вопрос о сегментации объектов методом кластерного анализа, о котором пойдет речь ниже и собственно его реализация на C++.
Сегментация объектов
Для начала немного теории:
Сегментация — это процесс разделения цифрового изображения на несколько сегментов (множеств пикселей). Проще говоря, это вещь, которая позволяет определить какие пиксели из данного множества относятся к Ferrari, а какие к Peugeot.
Очень эффективным с точки зрения вычислительных ресурсов является использование для сегментации методов кластерного анализа. Суть кластеризации состоит в том, что все исходные объекты (в данном случае пиксели ) разбиваются на несколько не пересекающихся групп таким образом, чтобы объекты, попавшие в одну группу, имели сходные характеристики, в то время как у объектов из разных групп эти характеристики должны значительно отличаться. Полученные группы называются кластерами. Исходными значениями в простейшем способе для кластеризации являются координаты пикселя (x, y), в более сложных случаях, например для полутоновых изображений, используется трехмерный вектор (x, y, I(x, y) ), где I(x, y) — градации серого
и пятимерный вектор если используется RGB.
Метод к-средних
Центроид — точка которая является центром кластера.
k-средних (k-means) — наиболее популярный метод кластеризации. Алгоритму широко отдается предпочтение из-за его простоты реализации, большой скорости (а это очень важно при работе с видео).
Действие алгоритма таково, что он стремится минимизировать суммарное квадратичное отклонение точек кластеров от центров этих кластеров. В простонародье говоря, это итеративный алгоритм, который делит данное множество пикселей на k кластеров точки, которых являются максимально приближенными к их центрам, а сама кластеризация происходит за счет смещения этих же центров. Такой себе принцип разделяй и властвуй.
Также следует оговорить то, что метод к-средних очень чувствительный к шуму, который может существенно исказить результаты кластеризации.Так что в идеале, перед кластеризацией, нужно прогнать кадры через фильтры предназначиные для его уменьшения.
Вот собственно сам принцип простейшей кластеризации методом к-средних:
- Надо выбрать из множества k пикселей те пиксели, которые будут центроидами соответствующих k кластеров.
Выборка начальных центроидов может быть как рандомной так и по определенному алгоритму.
- Входим в цикл, который продолжается до тех пор, пока центроиды кластеров не перестанут изменять свое положение.
- Обходим каждый пиксель и смотрим, к какому центроиду какого кластера он является близлежащим.
- Нашли близлежащий центроид? Привязываем пиксель к кластеру этого центроида.
- Перебрали все пиксели? Теперь нужно высчитать новые координаты центроидов k кластеров.
- Теперь проверяем координаты новых центроидов. Если они соответственно равны предыдущим центроидам — выходим из цикла, если нет возвращаемся к пункту 3.
Вот картинка, которая приблизительно демонстрируют работу алгоритма:
Вот неплохой апплет для иллюстрации работы алгоритма к-средних
Начнем
Для начала нам нужен класс, назовем его Cluster, который будет хранить вектор координат пикселей относящихся к кластеру, текущие и предыдущие значения координат центроида:
class Cluster{ vector<POINT> scores; public: int curX , curY;//координаты текущего центроида int lastX, lastY;//координаты предыдущего центоида size_t Size(){ return scores.size();}//получаем размер вектора inline void Add(POINT pt){ scores.push_back(pt); }//Добавляем пиксель к кластеру void SetCenter(); void Clear();//Чистим вектор static Cluster* Bind(int k, Cluster * clusarr, vector<POINT>& vpt); static void InitialCenter(int k, Cluster * clusarr , vector<POINT>& vpt);; static void Start(int k, Cluster * clusarr, vector<POINT>& vpt); inline POINT& at(unsigned i){ return scores.at(i);}//Доступ к элементам вектора };
Теперь нам надо реализовать метод которой будет распределять начальные координаты центроидов. Можно конечно сделать чего-нибудь по сложнее, но в нашем случае сойдет и равномерное распределение по вектору:
void Cluster::InitialCenter(int k, Cluster * clusarr, vector<POINT>& vpt){ int size = vpt.size(); int step = size/k; int steper = 0; for(int i = 0;i < k;i++,steper+=step){ clusarr[i].curX = vpt[steper].x; clusarr[i].curY = vpt[steper].y; } }
Также нужно написать метод, который будет ответственный за нахождение новых координат центроида в соответствии с пунктом 5.Координаты нового центроида можно найти описав вокруг пикселей кластера прямоугольник и тогда центроидом будет пересечение его диагоналей.
void Cluster::SetCenter(){ int sumX = 0, sumY = 0; int i = 0; int size = Size(); for(; i<size;sumX+=scores[i].x,i++);//the centers of mass by x i = 0; for(; i<size;sumY+=scores[i].y, i++);//the centers of mass by y lastX = curX; lastY = curY; curX = sumX/size; curY = sumY/size; } void Cluster::Clear(){ scores.clear(); }
И теперь только остался сделать простенький метод самого «привязывания» пикселей к определенному кластеру по принципу сравнения модулей отрезков:
Cluster * Cluster::Bind(int k, Cluster * clusarr, vector<POINT>& vpt){ for(int j = 0; j < k;j++) clusarr[j].Clear();// Чистим кластер перед использованием int size = vpt.size(); for(int i = 0; i < size; i++){// Запускаем цикл по всем пикселям множества int min = sqrt( pow((float)clusarr[0].curX-vpt[i].x,2)+pow((float)clusarr[0].curY-vpt[i].y,2) ); Cluster * cl = &clusarr[0]; for(int j = 1; j < k; j++){ int tmp = sqrt( pow((float)clusarr[j].curX-vpt[i].x,2)+pow((float)clusarr[j].curY-vpt[i].y,2) ); if(min > tmp){ min = tmp; cl = &clusarr[j];}// Ищем близлежащий кластер } cl->Add(vpt[i]);// Добавляем в близ лежащий кластер текущий пиксель } return clusarr; }
И наконец главный цикл:
void Cluster::Start(int k, Cluster * clusarr, vector<POINT>& vpt){ Cluster::InitialCenter(k,clusarr,vpt); for(;;){//Запускаем основной цикл int chk = 0; Cluster::Bind(k,clusarr,vpt);//Связываем точки с кластерами for(int j = 0; j < k;j++)//Высчитываем новые координаты центроидов clusarr[j].SetCenter(); for(int p = 0; p<k;p++)//Проверяем не совпадают ли они с предыдущими цент-ми if(clusarr[p].curX == clusarr[p].lastX && clusarr[p].curY == clusarr[p].lastY) chk++; if(chk == k) return;//Если да выходим с цикла } }
И что же из этого всего следует?
Вернемся к картинке с машинами, кластеризуя движущиеся объекты возникает проблема при использовании алгоритма к-средних, а именно мы не знаем сколько в данной сцене будет движущихся объектов, хотя можем приблизительно предугадать. Например кадр с машинами, на той сцене разумным будет предположить, что ну максимум там будет машин 10. Таким образом задавая на вход программе k = 10 и обведя точки 10 кластеров зелеными прямоугольниками, мы получим примерно следующую картину:
Теперь банально объеденив пересекающиеся прямоугольники, мы находим результирующие кластеры, обведя которые прямоугольником мы получим изображение преведенное в начале поста.Все просто.

