В прошлой статье мы рассмотрели простейшую линейную генеративную модель PPCA. Вторая генеративная модель, которую мы рассмотрим — Generative Adversarial Networks, сокращенно GAN. В этой статье мы рассмотрим самую базовую версию этой модели, оставив продвинутые версии и сравнение с другими подходами в генеративном моделировании на следующие главы.
Генеративное моделирование предполагает аппроксимацию невычислимых апостериорных распределений. Из-за этого большинство эффективных методов, разработанных для обучения дискриминативных моделей, не работают с генеративными моделями. Существующие в прошлом методы для решения этой задачи вычислительно трудны и, в основном, основаны на использовании Markov Chain Monte Carlo, который плохо масштабируем. Поэтому для обучения генеративных моделей нужен был метод, основанный на таких масштабируемых техниках, как Stochastic Gradient Descent (SGD) и backpropagation. Один из таких методов — Generative Adversarial Networks (GAN). Впервые GANы были предложены в этой статье в 2014 году. Высокоуровнево эта модель может быть описана, как две подмодели, которые соревнуются друг с другом, и одна из этих моделей (генератор), пытается научиться в некотором смысле обманывать вторую (дискриминатор). Для этого генератор генерирует случайные объекты, а дискриминатор пытается отличить эти сгенерированные объекты от настоящих объектов из тренировочной выборки. В процессе обучения генератор генерирует все более похожие на выборку объекты и дискриминатору становится все сложнее отличить их от настоящих. Таким образом, генератор превращается в генеративную модель, которая генерирует объекты из некого сложного распределения, например, из распределения фотографий человеческих лиц.
Для начала введем необходимую терминологию. Через мы будем обозначать некоторое пространство объектов. Например, картинки
мы будем обозначать некоторое пространство объектов. Например, картинки  пикселя. На некотором вероятностном пространстве
пикселя. На некотором вероятностном пространстве  задана векторная случайная величина
задана векторная случайная величина  с распределением вероятностей, имеющим плотность
с распределением вероятностей, имеющим плотность  такую, что подмножество пространства , на котором принимает ненулевые значения — это, например, фотографии человеческих лиц. Нам дана случайная i.i.d. выборка фотографий лиц для величины
такую, что подмножество пространства , на котором принимает ненулевые значения — это, например, фотографии человеческих лиц. Нам дана случайная i.i.d. выборка фотографий лиц для величины  . Дополнительно определим вспомогательное пространство
. Дополнительно определим вспомогательное пространство  и случайную величину
и случайную величину  с распределением вероятностей, имеющим плотность
с распределением вероятностей, имеющим плотность  .
.  — функция-дискриминатор. Эта функция принимает на вход объект
— функция-дискриминатор. Эта функция принимает на вход объект  (в нашем примере — картинку соответствующего размера) и возвращает вероятность того, что входная картинка является фотографией человеческого лица.
(в нашем примере — картинку соответствующего размера) и возвращает вероятность того, что входная картинка является фотографией человеческого лица.  — функция-генератор. Она принимает значение
— функция-генератор. Она принимает значение  и выдает объект пространства , то есть, в нашем случае, картинку.
и выдает объект пространства , то есть, в нашем случае, картинку.
Предположим, что у нас уже есть идеальный дискриминатор . Для любого примера
. Для любого примера  он выдает истинную вероятность принадлежности этого примера заданному подмножеству , из которого получена выборка
он выдает истинную вероятность принадлежности этого примера заданному подмножеству , из которого получена выборка  . Переформулируя задачу обмана дискриминатора на вероятностном языке мы получаем, что необходимо максимизировать вероятность, выдаваемую идеальным дискриминатором на сгенерированных примерах. Таким образом оптимальный генератор находится как
. Переформулируя задачу обмана дискриминатора на вероятностном языке мы получаем, что необходимо максимизировать вероятность, выдаваемую идеальным дискриминатором на сгенерированных примерах. Таким образом оптимальный генератор находится как  . Так как
. Так как  — монотонно возрастающая функция и не меняет положения экстремумов аргумента, эту формулу переписать в виде
— монотонно возрастающая функция и не меняет положения экстремумов аргумента, эту формулу переписать в виде  , что будет удобно в дальнейшем.
, что будет удобно в дальнейшем.
В реальности обычно идеального дискриминатора нет и его надо найти. Так как задача дискриминатора — предоставлять сигнал для обучения генератора, вместо идеального дискриминатора достаточно взять дискриминатор, идеально отделяющий настоящие примеры от сгенерированных текущим генератором, т.е. идеальный только на подмножестве из которого генерируются примеры текущим генератором. Эту задачу можно переформулировать, как поиск такой функции , которая максимизирует вероятность правильной классификации примеров как настоящих или сгенерированных. Это называется задачей бинарной классификации и в данном случае мы имеем бесконечную обучающую выборку: конечное число настоящих примеров и потенциально бесконечное число сгенерированных примеров. У каждого примера есть метка: настоящий он или сгенерированный. В первой статье было описано решение задачи классификации с помощью метода максимального правдоподобия. Давайте распишем его для нашего случая.
Итак, наша выборка . Определим плотность распределения
. Определим плотность распределения  , тогда
, тогда  — это переформулировка дискриминатора , выдающего вероятность класса
— это переформулировка дискриминатора , выдающего вероятность класса  (настоящий пример) в виде распределения на классах
(настоящий пример) в виде распределения на классах  . Так как
. Так как  , это определение задает корректную плотность вероятности. Тогда оптимальный дискриминатор можно найти как:
, это определение задает корректную плотность вероятности. Тогда оптимальный дискриминатор можно найти как:

Сгруппируем множители для и
и  :
:



И при стремлении размера выборки в бесконечность, получаем:

Итого, получаем следующий итерационный процесс:
В оригинальной статье этот алгоритм суммаризируется в одну формулу, задающую в некотором смысле минимакс-игру между дискриминатором и генератором:

Обе функции могут быть представлены в виде нейросетей:
могут быть представлены в виде нейросетей:  , после чего задача поиска оптимальных функций сводится к задаче оптимизации по параметрам и ее можно решать с помощью традиционных методов: backpropagation и SGD. Дополнительно, так как нейросеть — это универсальный аппроксиматор функций,
, после чего задача поиска оптимальных функций сводится к задаче оптимизации по параметрам и ее можно решать с помощью традиционных методов: backpropagation и SGD. Дополнительно, так как нейросеть — это универсальный аппроксиматор функций,  может приблизить произвольное распределение вероятностей, что снимает вопрос выбора распределения . Это может быть любое непрерывное распределение в некоторых разумных рамках. Например,
может приблизить произвольное распределение вероятностей, что снимает вопрос выбора распределения . Это может быть любое непрерывное распределение в некоторых разумных рамках. Например,  или
или  . Корректность этого алгоритма и сходимость
. Корректность этого алгоритма и сходимость  к при достаточно общих предположениях доказана в оригинальной статье.
к при достаточно общих предположениях доказана в оригинальной статье.
С математикой мы разобрались, давайте теперь посмотрим, как это работает. Допустим, , т.е. решаем одномерную задачу.
, т.е. решаем одномерную задачу.  . Давайте использовать линейный генератор
. Давайте использовать линейный генератор  , где
, где  . Дискриминатор будет полносвязной трехслойной нейронной сетью с бинарным классификатором на конце. Решением этой задачи является
. Дискриминатор будет полносвязной трехслойной нейронной сетью с бинарным классификатором на конце. Решением этой задачи является  , то есть,
, то есть,  . Попробуем теперь запрограммировать численное решение этой задачи с помощью Tensorflow. Полный код можно найти тут, в статье же освещены только ключевые моменты.
. Попробуем теперь запрограммировать численное решение этой задачи с помощью Tensorflow. Полный код можно найти тут, в статье же освещены только ключевые моменты.
Первое, что нужно задать, это входную выборку: . Так как обучение идет на минибатчах, мы будем за раз генерировать вектор чисел. Дополнительно, выборка параметризуется средним и стандартным отклонением.
. Так как обучение идет на минибатчах, мы будем за раз генерировать вектор чисел. Дополнительно, выборка параметризуется средним и стандартным отклонением.
Теперь зададим случайные входы для генератора :
:
Определим генератор. Возьмем абсолютное значение второго параметра для придания ему смысла стандартного отклонения:
Создадим вектор реальных примеров:
И вектор сгенерированных примеров:
Теперь прогоним все примеры через дискриминатор. Тут важно помнить о том, что мы хотим не два разных дискриминатора, а один, потому Tensorflow нужно попросить использовать одни и те же параметры для обоих входов:
Функция потерь на реальных примерах — это кросс-энтропия между единицей (ожидаемым ответом дискриминатора на реальных примерах) и оценками дискриминатора:
Функция потерь на поддельных примерах — это кросс-энтропия между нулем (ожидаемым ответом дискриминатора на поддельных примерах) и оценками дискриминатора:
Функция потерь дискриминатора — это сумма потерь на реальных примерах и на поддельных примерах:
Функция потерь генератора — это кросс-энтропия между единицей (желаемым ошибочным ответом дискриминатора на поддельных примерах) и оценками этих поддельных примеров дискриминатором:
К функции потерь дискриминатора опционально добавляется L2-регуляризация.
Обучение модели сводится к поочередному обучению дискриминатора и генератора в цикле до сходимости:
Ниже приведены графики для четырех моделей дискриминатора:
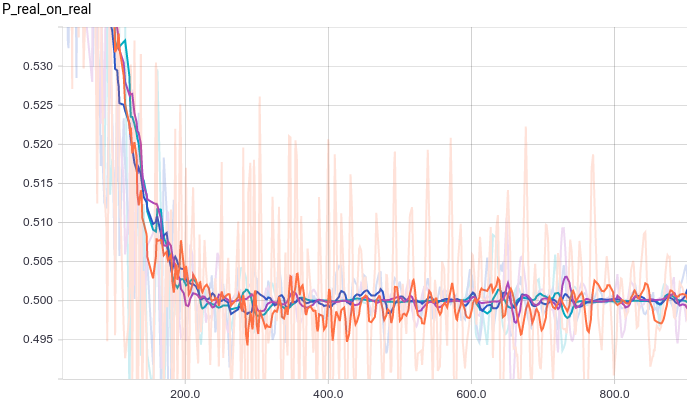
Рис. 1. Вероятность классификации дискриминатором реального примера как реального.
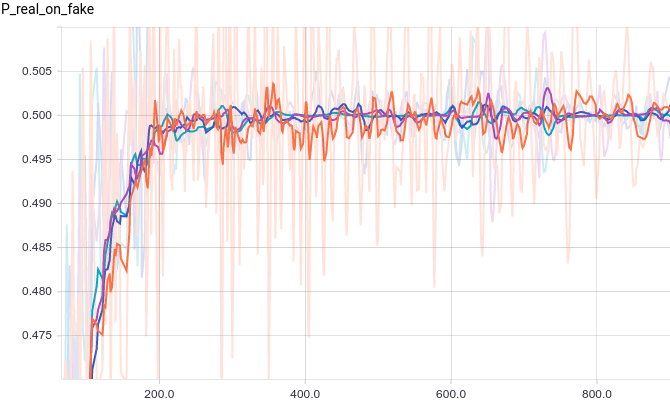
Рис. 2. Вероятность классификации дискриминатором сгенерированного примера как реального.
Все четыре модели достаточно быстро сходятся к тому, что дискриминатор выдает на всех входах. Из-за простоты задачи, которую решает генератор, между моделями почти нет разницы. Из графиков видно, что среднее и стандартное отклонение довольно быстро сходятся к значениям из распределения данных:
на всех входах. Из-за простоты задачи, которую решает генератор, между моделями почти нет разницы. Из графиков видно, что среднее и стандартное отклонение довольно быстро сходятся к значениям из распределения данных:
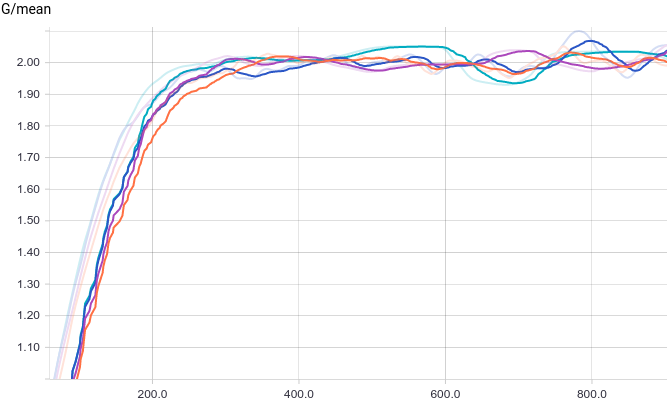
Рис. 3. Среднее сгенерированных распределений.
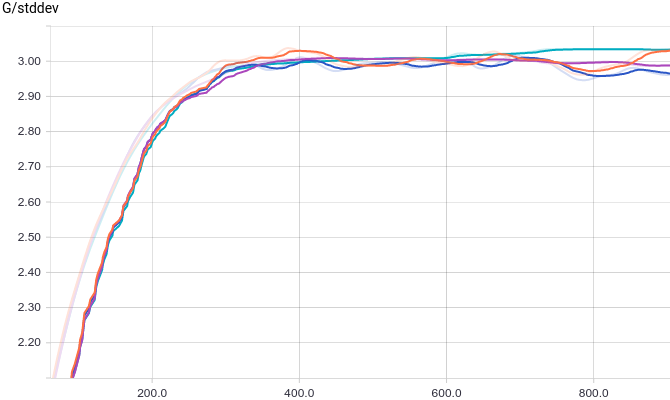
Рис. 4. Среднеквадратичное отклонение сгенерированных распределений.
Ниже приведены распределения настоящих и сгенерированных примеров в процессе обучения. Видно, что сгенерированные примеры к концу обучения практически не отличимы от настоящих (они отличимы на графиках потому, что Tensorboard выбрал разные масштабы, но, если посмотреть на значения, то они одинаковые).
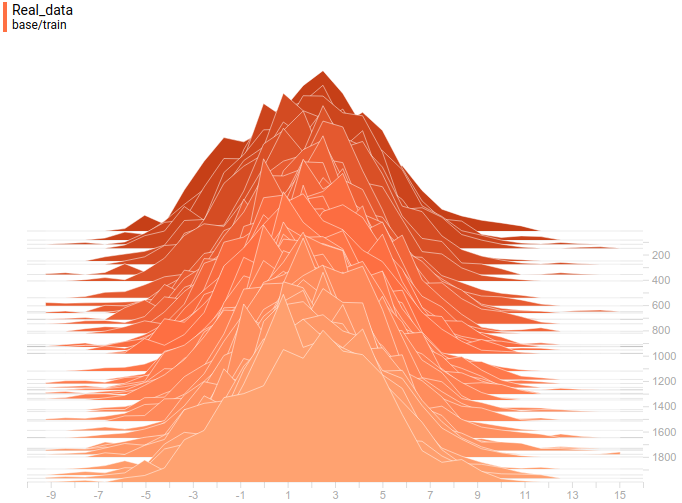
Рис. 5. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
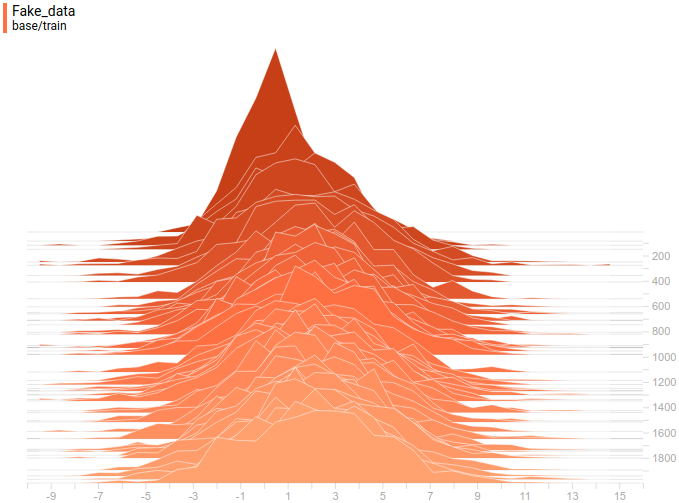
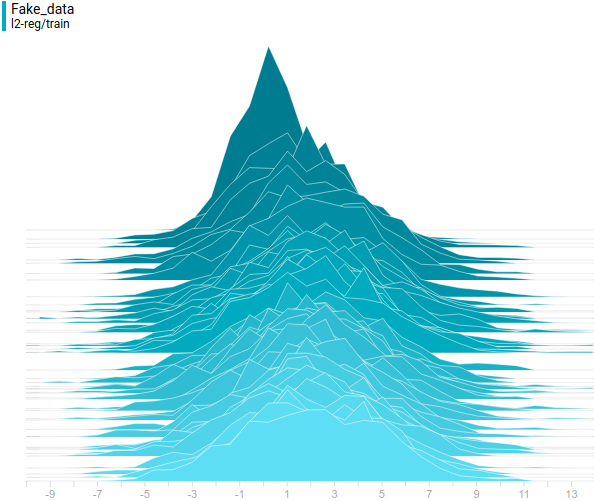
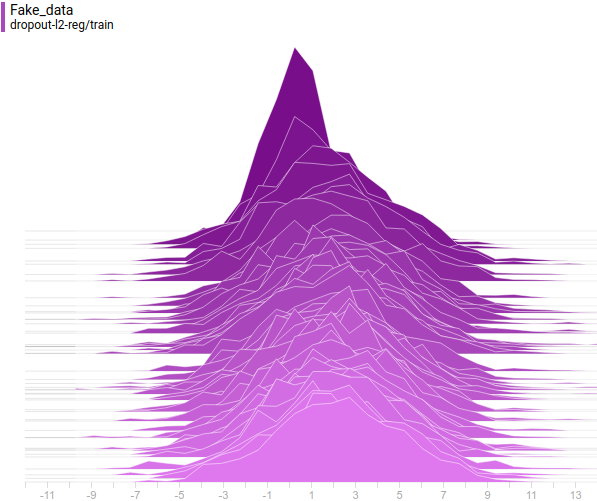
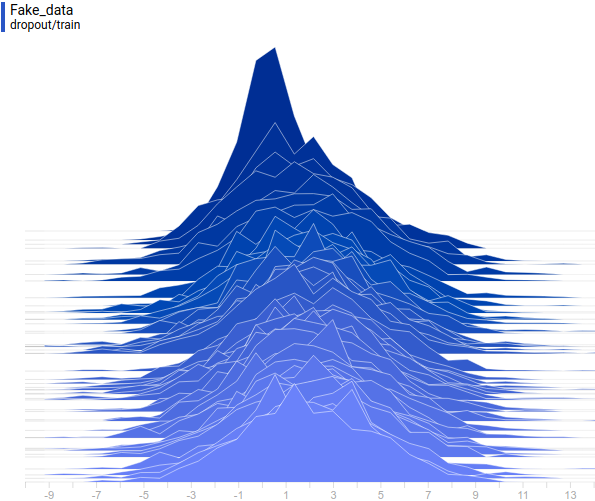
Рис. 6. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
Давайте посмотрим на процесс обучения модели:
Рис. 7. Визуализация процесса обучения модели. Неподвижная гауссиана — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Видно, что дискриминатор в начале обучения очень хорошо разделяет данные, но распределение генерируемых примеров очень быстро буквально “подползает” к распределению настоящих примеров. В конце концов, генератор настолько хорошо приближает данные, что дискриминатор становится константой и задача сходится.
Попробуем заменить на  , тем самым смоделировав мультимодальное распределение исходных данных. Для этой модели нужно изменить только код генерации реальных примеров. Вместо возвращения нормально распределенной случайной величины мы возвращаем смесь нескольких:
, тем самым смоделировав мультимодальное распределение исходных данных. Для этой модели нужно изменить только код генерации реальных примеров. Вместо возвращения нормально распределенной случайной величины мы возвращаем смесь нескольких:
Ниже приведены графики для тех же самых моделей, что и в прошлом эксперименте, но для данных с двумя модами:
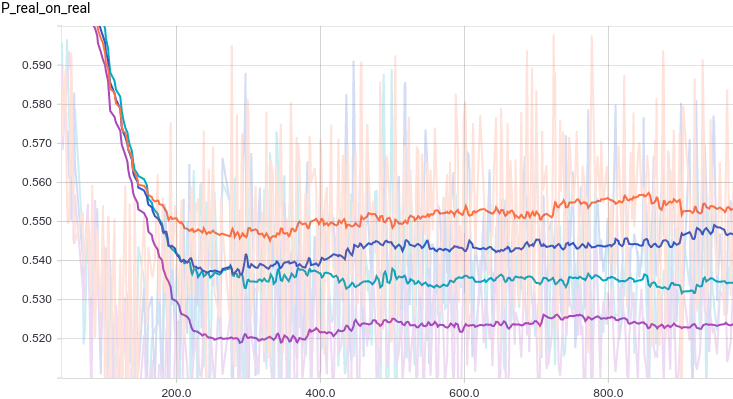
Рис. 8. Вероятность классификации дискриминатором реального примера как реального.
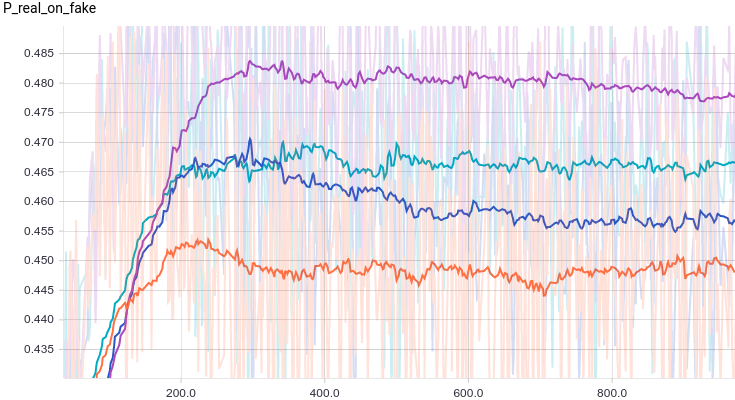
Рис. 9. Вероятность классификации дискриминатором сгенерированного примера как реального.
Интересно заметить, что регуляризованные модели показывают себя существенно лучше нерегуляризованных. Однако, независимо от модели видно, что теперь генератору не удается так хорошо обмануть дискриминатор. Давайте поймем, почему так получилось.
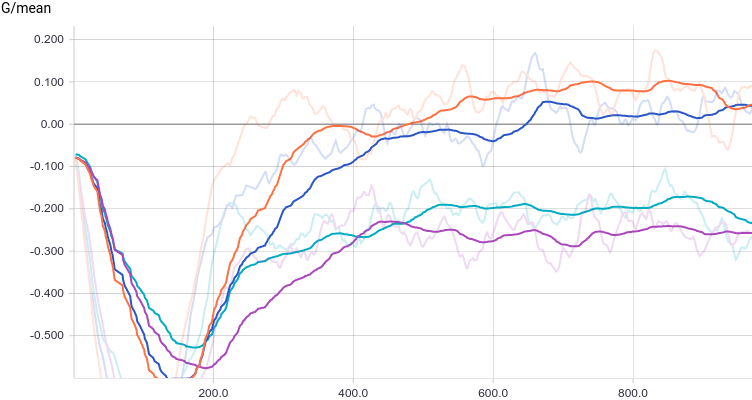
Рис. 10. Среднее сгенерированных распределений.
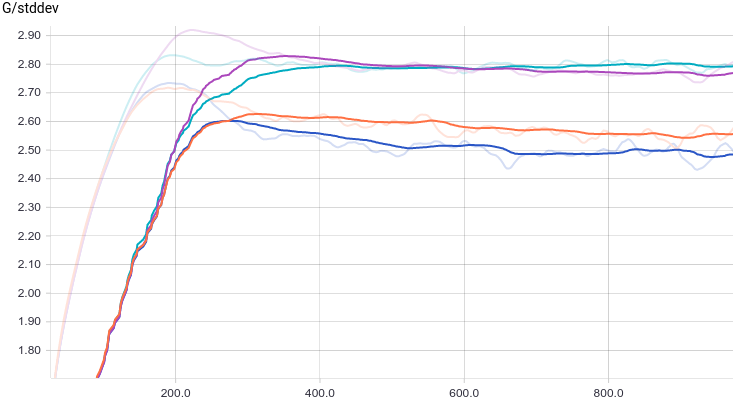
Рис. 11. Среднеквадратичное отклонение сгенерированных распределений.
Как и в первом эксперименте, генератор приближает данные нормальным распределением. Причина снижения качества в том, что теперь данные нельзя точно приблизить нормальным распределением, ведь они сэмплируются из смеси двух нормальных. Моды смеси симметричны относительно нуля, и видно, что все четыре модели приближают данные нормальным распределением с центром рядом с нулем и достаточно большой дисперсией. Давайте посмотрим на распределения настоящих и поддельных примеров, чтобы понять, что происходит:
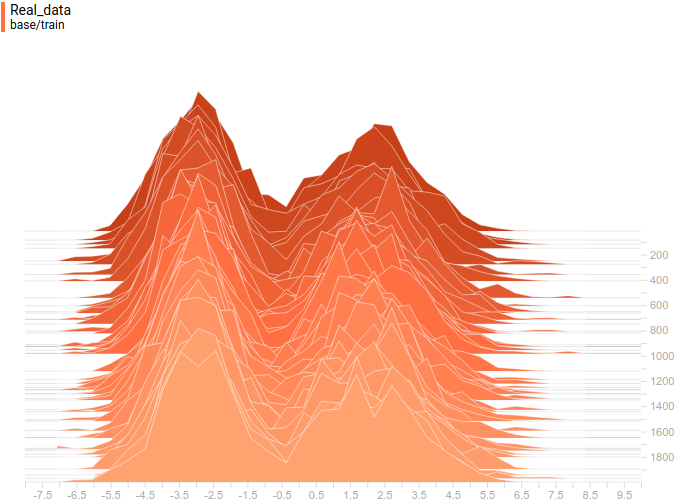
Рис 12. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
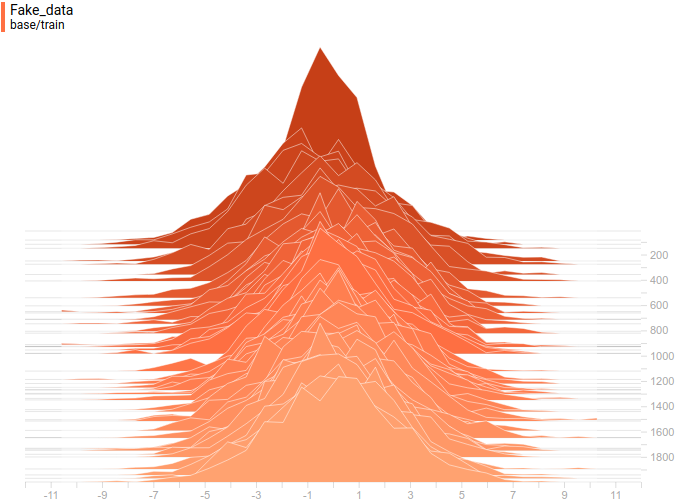
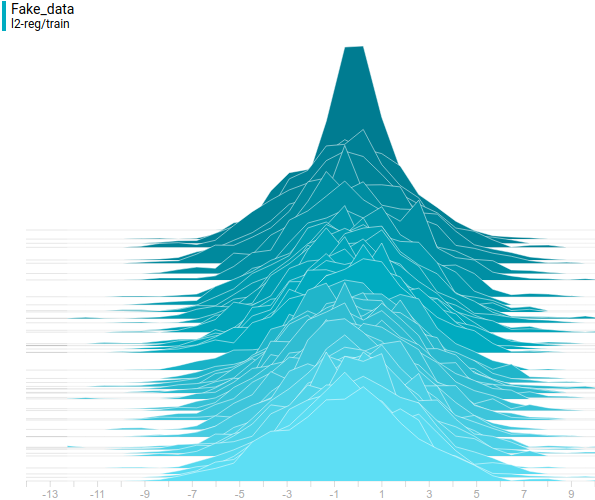
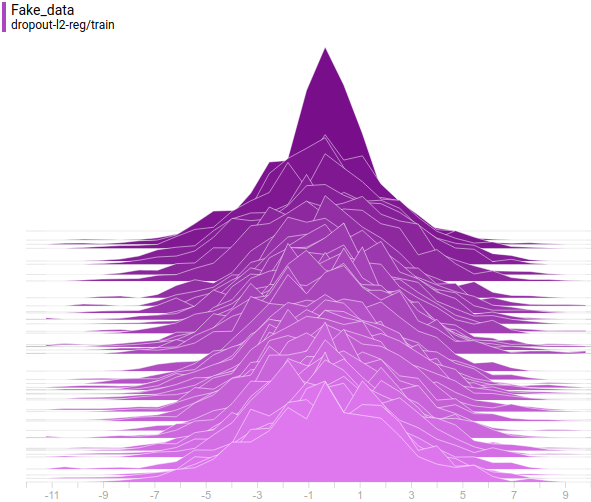
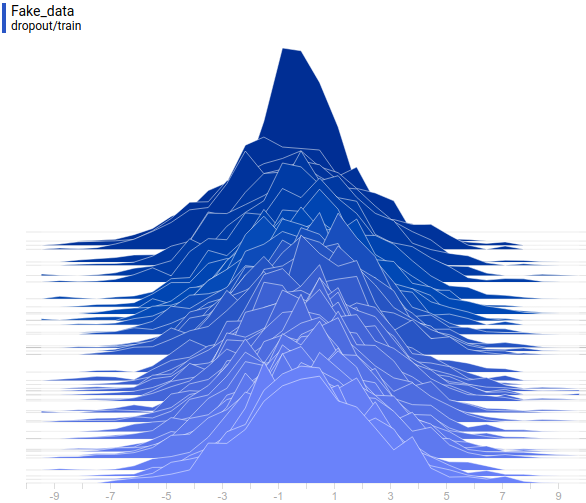
Рис 13. Распределения сгенерированных данных от четырех моделей. Шаг обучения отложен на вертикальной оси.
Так проходит процесс обучения модели:
Рис. 14. Визуализация процесса обучения модели. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Эта анимация подробно показывает изученный выше случай. Генератор, не обладая достаточной экспрессивностью и имея возможность приближать данные только гауссианой, расплывается в широкую гауссиану, пытаясь охватить обе моды распределения данных. В результате генератор достоверно обманывает дискриминатор только в местах, где площади под кривыми генератора и исходных данных близки, то есть в районе пересечений этих кривых.
Однако, это не единственный возможный случай. Давайте подвинем правую моду еще немного правее, чтобы начальное приближение генератора ее не захватывало.
Рис. 15. Визуализация процесса обучения модели. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Видно, что в этом случае генератору выгоднее всего попытаться приблизить левую моду распределения. После того, как это происходит, генератор пытается предпринять попытки захватить и левую моду. Это выглядит, как осцилляции стандартного отклонения генератора во второй половине анимации. Но все эти попытки проваливаются, так как дискриминатор как-бы “запирает” генератор и для захвата левой моды ему необходимо преодолеть барьер из высокой функции потерь, чего он не может сделать из-за недостаточно большой скорости обучения. Данный эффект называется коллапсированием моды.
На двух вышеописанных примерах мы увидели два типа проблем, возникающих в том случае, если генератор недостаточно мощный, чтобы выразить исходное распределение данных: усреднение мод, когда генератор приближает все распределение, но везде достаточно плохо; и коллапсирование моды, когда генератор выучивает подмножество мод, а те, которые он не выучил, никак на него не влияют.
Помимо того, что обе этих проблемы приводят к несходимости дискриминатора к, они также приводят к снижению качества генеративной модели. Первая проблема приводит к тому, что генератор выдает примеры “между” мод, которых не должно быть, вторая проблема приводит к тому, что генератор выдает примеры только из некоторых мод, тем самым снижая богатство исходного распределения данных.
Причиной того, что в предыдущем разделе не получилось до конца обмануть дискриминатор была тривиальность генератора, который просто делал линейное преобразование. Попробуем теперь в качестве генератора использовать полносвязную трехслойную нейронную сеть:
Давайте посмотрим на графики обучения.
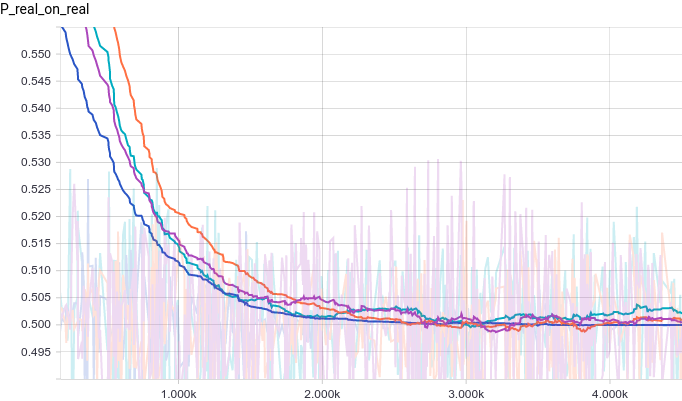
Рис. 16. Вероятность классификации дискриминатором реального примера как реального.
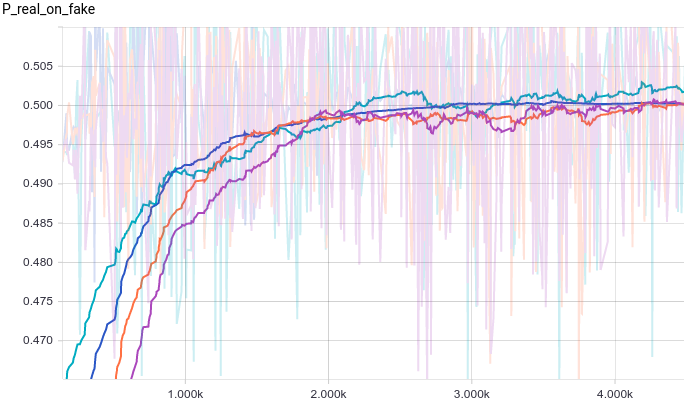
Рис. 17. Вероятность классификации дискриминатором сгенерированного примера как реального.
Видно, что из за большого количества параметров обучение стало гораздо более шумным. Дискриминаторы всех моделей сходятся к результату около, но ведут себя нестабильно вокруг этой точки. Давайте посмотрим на форму генератора.
Рис 18. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
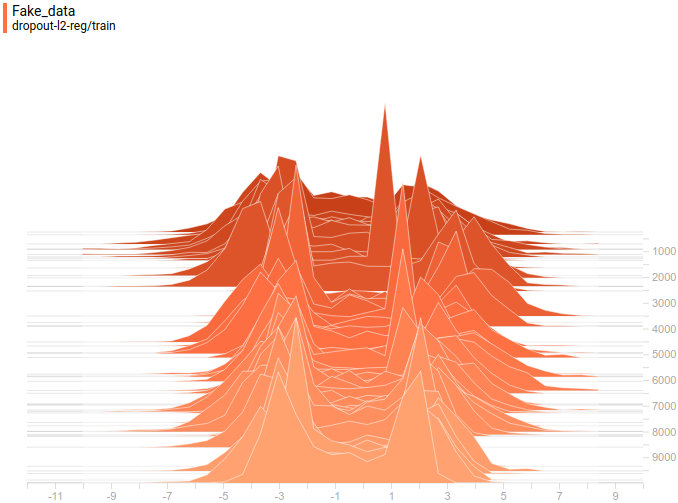
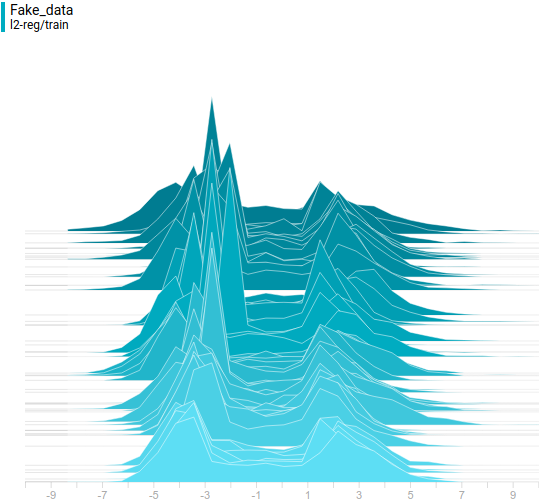
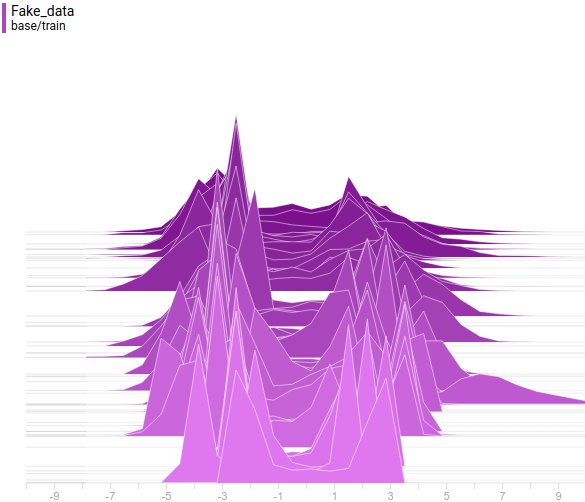
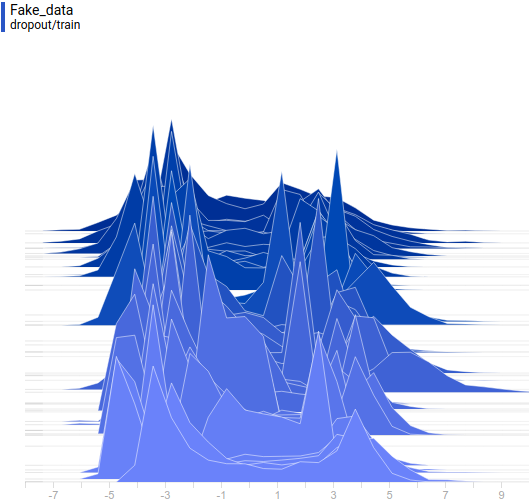
Рис 19. Распределения сгенерированных данных от четырех моделей. Шаг обучения отложен на вертикальной оси.
Видно, что распределение генератора хоть не совпадает с распределением данных, но достаточно сильно похоже на него. Самая регуляризованная модель опять показала себя лучше всех. Видно, что она выучила две моды, примерно совпадающие с модами распределения данных. Размеры пиков тоже не очень точно, но приближают распределение данных. Таким образом, нейросетевой генератор способен выучить мультимодальное распределение данных.
Так проходит процесс обучения модели:
Рис. 20. Визуализация процесса обучения модели с близкими модами. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Рис. 21. Визуализация процесса обучения модели с далекими модами. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Эти две анимации показывают обучение на распределениях данных из предыдущего раздела. Из этих анимаций видно, что при использовании достаточно большого генератора с множеством параметров он, пусть и довольно грубо, но способен приближать мультимодальное распределение, тем самым косвенно подтверждая то, что проблемы из предыдущего раздела возникают из-за недостаточно сложного генератора. Дискриминаторы на этих анимациях гораздо более шумные, чем в разделе про нахождение параметров нормального распределения, но, тем не менее, к концу обучения начинают напоминать зашумленную горизонтальную прямую .
.
GAN — это модель, для приближения произвольного распределения только с помощью сэмплирования из этого распределения. В этой статье мы посмотрели в деталях, как модель работает на тривиальном примере поиска параметров нормального распределения и на более сложном примере аппроксимации бимодального распределения нейронной сетью. Обе задачи были с хорошей точностью решены, для чего потребовалось только использовать достаточно сложную модель генератора. В следующей статье мы перейдем от этих модельных примеров к реальным примерам генерации сэмплов из сложных распределений на примере распределения изображений.
Спасибо Olga Talanova и Ruslan Login за ревью текста. Спасибо Ruslan Login за помощь в подготовке изображений и анимаций. Спасибо Andrei Tarashkevich за помощь с версткой этой статьи.
История
Генеративное моделирование предполагает аппроксимацию невычислимых апостериорных распределений. Из-за этого большинство эффективных методов, разработанных для обучения дискриминативных моделей, не работают с генеративными моделями. Существующие в прошлом методы для решения этой задачи вычислительно трудны и, в основном, основаны на использовании Markov Chain Monte Carlo, который плохо масштабируем. Поэтому для обучения генеративных моделей нужен был метод, основанный на таких масштабируемых техниках, как Stochastic Gradient Descent (SGD) и backpropagation. Один из таких методов — Generative Adversarial Networks (GAN). Впервые GANы были предложены в этой статье в 2014 году. Высокоуровнево эта модель может быть описана, как две подмодели, которые соревнуются друг с другом, и одна из этих моделей (генератор), пытается научиться в некотором смысле обманывать вторую (дискриминатор). Для этого генератор генерирует случайные объекты, а дискриминатор пытается отличить эти сгенерированные объекты от настоящих объектов из тренировочной выборки. В процессе обучения генератор генерирует все более похожие на выборку объекты и дискриминатору становится все сложнее отличить их от настоящих. Таким образом, генератор превращается в генеративную модель, которая генерирует объекты из некого сложного распределения, например, из распределения фотографий человеческих лиц.
Модель
Для начала введем необходимую терминологию. Через
мы будем обозначать некоторое пространство объектов. Например, картинки пикселя. На некотором вероятностном пространстве задана векторная случайная величина с распределением вероятностей, имеющим плотность такую, что подмножество пространства , на котором принимает ненулевые значения — это, например, фотографии человеческих лиц. Нам дана случайная i.i.d. выборка фотографий лиц для величины . Дополнительно определим вспомогательное пространство и случайную величину с распределением вероятностей, имеющим плотность . — функция-дискриминатор. Эта функция принимает на вход объект (в нашем примере — картинку соответствующего размера) и возвращает вероятность того, что входная картинка является фотографией человеческого лица. — функция-генератор. Она принимает значение и выдает объект пространства , то есть, в нашем случае, картинку.Предположим, что у нас уже есть идеальный дискриминатор
. Для любого примера он выдает истинную вероятность принадлежности этого примера заданному подмножеству , из которого получена выборка . Переформулируя задачу обмана дискриминатора на вероятностном языке мы получаем, что необходимо максимизировать вероятность, выдаваемую идеальным дискриминатором на сгенерированных примерах. Таким образом оптимальный генератор находится как . Так как — монотонно возрастающая функция и не меняет положения экстремумов аргумента, эту формулу переписать в виде , что будет удобно в дальнейшем.В реальности обычно идеального дискриминатора нет и его надо найти. Так как задача дискриминатора — предоставлять сигнал для обучения генератора, вместо идеального дискриминатора достаточно взять дискриминатор, идеально отделяющий настоящие примеры от сгенерированных текущим генератором, т.е. идеальный только на подмножестве
из которого генерируются примеры текущим генератором. Эту задачу можно переформулировать, как поиск такой функции , которая максимизирует вероятность правильной классификации примеров как настоящих или сгенерированных. Это называется задачей бинарной классификации и в данном случае мы имеем бесконечную обучающую выборку: конечное число настоящих примеров и потенциально бесконечное число сгенерированных примеров. У каждого примера есть метка: настоящий он или сгенерированный. В первой статье было описано решение задачи классификации с помощью метода максимального правдоподобия. Давайте распишем его для нашего случая.Итак, наша выборка
. Определим плотность распределения , тогда — это переформулировка дискриминатора , выдающего вероятность класса (настоящий пример) в виде распределения на классах . Так как , это определение задает корректную плотность вероятности. Тогда оптимальный дискриминатор можно найти как:Сгруппируем множители для
и :И при стремлении размера выборки в бесконечность, получаем:
Итого, получаем следующий итерационный процесс:
- Устанавливаем произвольный начальный
 .
. - Начинается
 -я итерация,
-я итерация,  .
. - Ищем оптимальный для текущего генератора дискриминатор:
 .
. - Улучшаем генератор, используя оптимальный дискриминатор:
 . Важно находиться в окрестности текущего генератора. Если отойти далеко от текущего генератора, то дискриминатор перестанет быть оптимальным и алгоритм перестанет быть верным.
. Важно находиться в окрестности текущего генератора. Если отойти далеко от текущего генератора, то дискриминатор перестанет быть оптимальным и алгоритм перестанет быть верным. - Задача обучения генератора считается решенной, когда
 для любого . Если процесс не сошелся, то переходим на следующую итерацию в пункт (2).
для любого . Если процесс не сошелся, то переходим на следующую итерацию в пункт (2).
В оригинальной статье этот алгоритм суммаризируется в одну формулу, задающую в некотором смысле минимакс-игру между дискриминатором и генератором:
Обе функции
могут быть представлены в виде нейросетей: , после чего задача поиска оптимальных функций сводится к задаче оптимизации по параметрам и ее можно решать с помощью традиционных методов: backpropagation и SGD. Дополнительно, так как нейросеть — это универсальный аппроксиматор функций, может приблизить произвольное распределение вероятностей, что снимает вопрос выбора распределения . Это может быть любое непрерывное распределение в некоторых разумных рамках. Например, или . Корректность этого алгоритма и сходимость к при достаточно общих предположениях доказана в оригинальной статье.Нахождение параметров нормального распределения
С математикой мы разобрались, давайте теперь посмотрим, как это работает. Допустим,
, т.е. решаем одномерную задачу. . Давайте использовать линейный генератор , где . Дискриминатор будет полносвязной трехслойной нейронной сетью с бинарным классификатором на конце. Решением этой задачи является , то есть, . Попробуем теперь запрограммировать численное решение этой задачи с помощью Tensorflow. Полный код можно найти тут, в статье же освещены только ключевые моменты.Первое, что нужно задать, это входную выборку:
. Так как обучение идет на минибатчах, мы будем за раз генерировать вектор чисел. Дополнительно, выборка параметризуется средним и стандартным отклонением.def data_batch(hparams): """ Input data are just samples from N(mean, stddev). """ return tf.random_normal( [hparams.batch_size, 1], hparams.input_mean, hparams.input_stddev)
Теперь зададим случайные входы для генератора
:def generator_input(hparams): """ Generator input data are just samples from N(0, 1). """ return tf.random_normal([hparams.batch_size, 1], 0., 1.)
Определим генератор. Возьмем абсолютное значение второго параметра для придания ему смысла стандартного отклонения:
def generator(input, hparams): mean = tf.Variable(tf.constant(0.)) stddev = tf.sqrt(tf.Variable(tf.constant(1.)) ** 2) return input * stddev + mean
Создадим вектор реальных примеров:
generator_input = generator_input(hparams) generated = generator(generator_input)
И вектор сгенерированных примеров:
generator_input = generator_input(hparams) generated = generator(generator_input)
Теперь прогоним все примеры через дискриминатор. Тут важно помнить о том, что мы хотим не два разных дискриминатора, а один, потому Tensorflow нужно попросить использовать одни и те же параметры для обоих входов:
with tf.variable_scope("discriminator"): real_ratings = discriminator(real_input, hparams) with tf.variable_scope("discriminator", reuse=True): generated_ratings = discriminator(generated, hparams)
Функция потерь на реальных примерах — это кросс-энтропия между единицей (ожидаемым ответом дискриминатора на реальных примерах) и оценками дискриминатора:
loss_real = tf.reduce_mean( tf.nn.sigmoid_cross_entropy_with_logits( labels=tf.ones_like(real_ratings), logits=real_ratings))
Функция потерь на поддельных примерах — это кросс-энтропия между нулем (ожидаемым ответом дискриминатора на поддельных примерах) и оценками дискриминатора:
loss_generated = tf.reduce_mean( tf.nn.sigmoid_cross_entropy_with_logits( labels=tf.zeros_like(generated_ratings), logits=generated_ratings))
Функция потерь дискриминатора — это сумма потерь на реальных примерах и на поддельных примерах:
discriminator_loss = loss_generated + loss_real
Функция потерь генератора — это кросс-энтропия между единицей (желаемым ошибочным ответом дискриминатора на поддельных примерах) и оценками этих поддельных примеров дискриминатором:
generator_loss = tf.reduce_mean( tf.nn.sigmoid_cross_entropy_with_logits( labels=tf.ones_like(generated_ratings), logits=generated_ratings))
К функции потерь дискриминатора опционально добавляется L2-регуляризация.
Обучение модели сводится к поочередному обучению дискриминатора и генератора в цикле до сходимости:
for step in range(args.max_steps): session.run(model.discriminator_train) session.run(model.generator_train)
Ниже приведены графики для четырех моделей дискриминатора:
- трехслойная нейронная сеть.
- трехслойная нейронная сеть с L2-регуляризацией..
- трехслойная нейронная сеть с dropout-регуляризацией.
- трехслойная нейронная сеть с L2- и dropout-регуляризацией.
Рис. 1. Вероятность классификации дискриминатором реального примера как реального.
Рис. 2. Вероятность классификации дискриминатором сгенерированного примера как реального.
Все четыре модели достаточно быстро сходятся к тому, что дискриминатор выдает
на всех входах. Из-за простоты задачи, которую решает генератор, между моделями почти нет разницы. Из графиков видно, что среднее и стандартное отклонение довольно быстро сходятся к значениям из распределения данных:Рис. 3. Среднее сгенерированных распределений.
Рис. 4. Среднеквадратичное отклонение сгенерированных распределений.
Ниже приведены распределения настоящих и сгенерированных примеров в процессе обучения. Видно, что сгенерированные примеры к концу обучения практически не отличимы от настоящих (они отличимы на графиках потому, что Tensorboard выбрал разные масштабы, но, если посмотреть на значения, то они одинаковые).
Рис. 5. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
Рис. 6. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
Давайте посмотрим на процесс обучения модели:
Рис. 7. Визуализация процесса обучения модели. Неподвижная гауссиана — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Видно, что дискриминатор в начале обучения очень хорошо разделяет данные, но распределение генерируемых примеров очень быстро буквально “подползает” к распределению настоящих примеров. В конце концов, генератор настолько хорошо приближает данные, что дискриминатор становится константой
и задача сходится.Приближение смеси нормальных распределений I
Попробуем заменить
на , тем самым смоделировав мультимодальное распределение исходных данных. Для этой модели нужно изменить только код генерации реальных примеров. Вместо возвращения нормально распределенной случайной величины мы возвращаем смесь нескольких:def data_batch(hparams): count = len(hparams.input_mean) componens = [] for i in range(count): componens.append( tf.contrib.distributions.Normal( loc=hparams.input_mean[i], scale=hparams.input_stddev[i])) return tf.contrib.distributions.Mixture( cat=tf.contrib.distributions.Categorical( probs=[1./count] * count), components=componens) .sample(sample_shape=[hparams.batch_size, 1])
Ниже приведены графики для тех же самых моделей, что и в прошлом эксперименте, но для данных с двумя модами:
Рис. 8. Вероятность классификации дискриминатором реального примера как реального.
Рис. 9. Вероятность классификации дискриминатором сгенерированного примера как реального.
Интересно заметить, что регуляризованные модели показывают себя существенно лучше нерегуляризованных. Однако, независимо от модели видно, что теперь генератору не удается так хорошо обмануть дискриминатор. Давайте поймем, почему так получилось.
Рис. 10. Среднее сгенерированных распределений.
Рис. 11. Среднеквадратичное отклонение сгенерированных распределений.
Как и в первом эксперименте, генератор приближает данные нормальным распределением. Причина снижения качества в том, что теперь данные нельзя точно приблизить нормальным распределением, ведь они сэмплируются из смеси двух нормальных. Моды смеси симметричны относительно нуля, и видно, что все четыре модели приближают данные нормальным распределением с центром рядом с нулем и достаточно большой дисперсией. Давайте посмотрим на распределения настоящих и поддельных примеров, чтобы понять, что происходит:
Рис 12. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
Рис 13. Распределения сгенерированных данных от четырех моделей. Шаг обучения отложен на вертикальной оси.
Так проходит процесс обучения модели:
Рис. 14. Визуализация процесса обучения модели. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Эта анимация подробно показывает изученный выше случай. Генератор, не обладая достаточной экспрессивностью и имея возможность приближать данные только гауссианой, расплывается в широкую гауссиану, пытаясь охватить обе моды распределения данных. В результате генератор достоверно обманывает дискриминатор только в местах, где площади под кривыми генератора и исходных данных близки, то есть в районе пересечений этих кривых.
Однако, это не единственный возможный случай. Давайте подвинем правую моду еще немного правее, чтобы начальное приближение генератора ее не захватывало.
Рис. 15. Визуализация процесса обучения модели. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Видно, что в этом случае генератору выгоднее всего попытаться приблизить левую моду распределения. После того, как это происходит, генератор пытается предпринять попытки захватить и левую моду. Это выглядит, как осцилляции стандартного отклонения генератора во второй половине анимации. Но все эти попытки проваливаются, так как дискриминатор как-бы “запирает” генератор и для захвата левой моды ему необходимо преодолеть барьер из высокой функции потерь, чего он не может сделать из-за недостаточно большой скорости обучения. Данный эффект называется коллапсированием моды.
На двух вышеописанных примерах мы увидели два типа проблем, возникающих в том случае, если генератор недостаточно мощный, чтобы выразить исходное распределение данных: усреднение мод, когда генератор приближает все распределение, но везде достаточно плохо; и коллапсирование моды, когда генератор выучивает подмножество мод, а те, которые он не выучил, никак на него не влияют.
Помимо того, что обе этих проблемы приводят к несходимости дискриминатора к
, они также приводят к снижению качества генеративной модели. Первая проблема приводит к тому, что генератор выдает примеры “между” мод, которых не должно быть, вторая проблема приводит к тому, что генератор выдает примеры только из некоторых мод, тем самым снижая богатство исходного распределения данных.Приближение смеси нормальных распределений II
Причиной того, что в предыдущем разделе не получилось до конца обмануть дискриминатор была тривиальность генератора, который просто делал линейное преобразование. Попробуем теперь в качестве генератора использовать полносвязную трехслойную нейронную сеть:
def generator(self, input, hparams): # Первый полносвязный слой с 256 фичами. input_size = 1 features = 256 weights = tf.get_variable( "weights_1", initializer=tf.truncated_normal( [input_size, features], stddev=0.1)) biases = tf.get_variable( "biases_1", initializer=tf.constant(0.1, shape=[features])) hidden_layer = tf.nn.relu(tf.matmul(input, weights) + biases) # Второй полносвязный слой с 256 фичами. features = 256 weights = tf.get_variable( "weights_2", initializer=tf.truncated_normal( [input_size, features], stddev=0.1)) biases = tf.get_variable( "biases_2", initializer=tf.constant(0.1, shape=[features])) hidden_layer = tf.nn.relu(tf.matmul(input, weights) + biases) # Последний линейный слой, генерирующий пример. output_size = 1 weights = tf.get_variable( "weights_out", initializer=tf.truncated_normal( [features, output_size], stddev=0.1)) biases = tf.get_variable( "biases_out", initializer=tf.constant(0.1, shape=[output_size])) return tf.matmul(hidden_layer, weights) + biases
Давайте посмотрим на графики обучения.
Рис. 16. Вероятность классификации дискриминатором реального примера как реального.
Рис. 17. Вероятность классификации дискриминатором сгенерированного примера как реального.
Видно, что из за большого количества параметров обучение стало гораздо более шумным. Дискриминаторы всех моделей сходятся к результату около
, но ведут себя нестабильно вокруг этой точки. Давайте посмотрим на форму генератора.Рис 18. Распределение реальных данных. Не меняется во времени. Шаг обучения отложен на вертикальной оси.
Рис 19. Распределения сгенерированных данных от четырех моделей. Шаг обучения отложен на вертикальной оси.
Видно, что распределение генератора хоть не совпадает с распределением данных, но достаточно сильно похоже на него. Самая регуляризованная модель опять показала себя лучше всех. Видно, что она выучила две моды, примерно совпадающие с модами распределения данных. Размеры пиков тоже не очень точно, но приближают распределение данных. Таким образом, нейросетевой генератор способен выучить мультимодальное распределение данных.
Так проходит процесс обучения модели:
Рис. 20. Визуализация процесса обучения модели с близкими модами. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Рис. 21. Визуализация процесса обучения модели с далекими модами. Неподвижная смесь гауссиан — плотность распределения реальных данных, движущаяся гауссиана — плотность распределения генерируемых примеров, синяя кривая — результат работы дискриминатора, т.е. вероятность примера быть настоящим.
Эти две анимации показывают обучение на распределениях данных из предыдущего раздела. Из этих анимаций видно, что при использовании достаточно большого генератора с множеством параметров он, пусть и довольно грубо, но способен приближать мультимодальное распределение, тем самым косвенно подтверждая то, что проблемы из предыдущего раздела возникают из-за недостаточно сложного генератора. Дискриминаторы на этих анимациях гораздо более шумные, чем в разделе про нахождение параметров нормального распределения, но, тем не менее, к концу обучения начинают напоминать зашумленную горизонтальную прямую
.Итоги
GAN — это модель, для приближения произвольного распределения только с помощью сэмплирования из этого распределения. В этой статье мы посмотрели в деталях, как модель работает на тривиальном примере поиска параметров нормального распределения и на более сложном примере аппроксимации бимодального распределения нейронной сетью. Обе задачи были с хорошей точностью решены, для чего потребовалось только использовать достаточно сложную модель генератора. В следующей статье мы перейдем от этих модельных примеров к реальным примерам генерации сэмплов из сложных распределений на примере распределения изображений.
Благодарности
Спасибо Olga Talanova и Ruslan Login за ревью текста. Спасибо Ruslan Login за помощь в подготовке изображений и анимаций. Спасибо Andrei Tarashkevich за помощь с версткой этой статьи.

