
Хабр Курсы для всех
РЕКЛАМА
Практикум, Хекслет, SkyPro, авторские курсы — собрали всех и попросили скидки. Осталось выбрать!
Одни только лидары, которые Google когда-то покупала по $75 000, теперь стоят всего $7500. Это был самый дорогой компонент. Но теперь кажется, что полностью беспилотная машина в итоге станет даже дешевле обычной. Ведь из неё можно изъять кучу механических узлов, приспособленных под бесполезную человеческую физиологию.
1) Стоит учитывать, что в нынешнем среднестатистическом беспилотном автомобиле лидаров ставят не один, а сразу штук 6-8 (не считая еще пачки оптических камер и набора радаров), т.ч. к итоговой цене за доп.оборудование нужно применять мультипликатор.
2)
И по заявленному «удешевлению лидара в 10 раз» тоже следует оговориться, что за последние годы эти устройства сами по себе существенно подешевели. Google покупала их по $75 000 в 2009 году, а сейчас крупнейший в мире производитель лидаров Velodyne продает их в розницу по по $7999.
А тут стоит заметить, что это не лидары подешевели, а Google (да и другие пионеры этой области) перешли с дорогих 32/64 канальных лидаров(которые стоят как и прежде по 70+K$) на более дешевые 16-канальные, компенсируя меньшую канальность за счет sensor fusion с нескольких лидаров/радаров/камер одновременно.
Число каналов — это число одновременно испускаемых лидаром лучей (очевидно, что соответствует числу одновременных измерений) и число приемников соответственно. Как правило лучи располагаются на одной вертикальной линии и с некоторым шагом по вертикали светят в одну сторону (т.е. по сути каждый канал сканирует одну жестко заданую "строку" в пространстве). Чем больше каналов, тем больше строк одновременно можно сканировать и тем более плотный point cloud вы получите от лидара.
А sensor fusion — это общее название для всевозможных техник, позволяющих объединить данные, поступающие с нескольких сенсоров (не обязательно одинаковых). Т.е. в случае лидаров: мы получаем несколько облаков с каждого лидара, а потом склеиваем все облака в одно (т.к. относительное положение лидаров относительно друг друга нам известно) за счет каких-либо математических методов. Т.е. по сути, когда мы говорим о том, что "лидары подешевели в 10 раз", на самом деле мы сэкономили за счет того, что решили проблему недостаточной плотности облака за счет дополнительных вычислений. Из минусов такого подхода: наше бортовое железо должно быть достаточно быстрым, чтобы в реальном времени все это процессить. Ил пюсов: масштабируемость, т.к. мы можем получить сколько угодно плотное облако добавлением дополнительных сенсоров.
Напротив, значительный процент серьезных аварий с «трупами» — от водителя практически ничего не зависит. Сочетание куска гололеда, колдобины плюс порыва бокового ветра — и вот фура с самым идеальным роботом-водителем улетает кувыркаясь и снося окружающие автобусы с людьми…
Это то, что пропагандируют ГАИ
По вине женщин-водителей — всего 7% трупов…
Не знаю, может быть Вы очень аккуратный водитель, я за свои 600кк трижды попадал в аварии (и один раз проскочил мимо) исключительно по своей вине, ибо нефиг нестись за 100 по мокрой дороге, а 2 раза проскакивал мимо — да, по вине неожиданно возникшего льда, хотя неожиданность льда на дороге зимой при -12 градусов сильно преувеличена.
из-за нарушения ПДД водителями транспортных средств — 85 % (в том числе находившимися в состоянии опьянения).
ПДД РФ, Приложение 2, пункт 1, последний абзацВ случаях, когда значения дорожных знаков, в том числе временных, и линий горизонтальной разметки противоречат друг другу либо разметка недостаточно различима, водители должны руководствоваться дорожными знаками.
©ПДД, Приложение 2. Дорожная разметка и ее характеристики, пункт 1. Горизонтальная разметка, последний абзац
посмотрите подборки аварийА вы смотрите не подборки аварий, а статистику по авариям. Около 80% пострадавших, как пешеходов так и водителей/пассажиров — это пострадавшие от легковых авто, а вовсе не от фур. Зимой, конечно же, пострадавших больше, но даже не в разы — так что гололед с боковым ветром существенного вклада не вносят.
Прежде, чем робота выпускать на дороги, нужно все дороги почистить, нарисовать непротиворечивую разметку и повесить непротиворечивые знаки, поддерживать актуальность базы данных с разметкой и знаками, маркировать колдобины, выставлять предупреждающие знаки о дорожных работах заранее и прочая, прочая, прочая…
А если еще и сигнал будет передаваться по зашифрованному каналу заранее установленному — то проблем становится на порядок меньше. А если сигналы еще и логироваться будут и к каждому пустившему такой сигнал из своей машины достаточно быстро будут приходить большие штрафы, то проблема вообще, скорее всего, перестает существовать.
Что только показывает что это сработает.
И пробок, с точки зрения москвича, нет, даже в Копенгагене.Так там и машин столько нет. Потому что в Дании налоги/сборы на машину за год могут быть запросто больше её стоимости.
Как же обгонять такую колонну, если представить себе, что кому-то очень надо? Уступят ли они тому, кто вынужден втискиваться, срочно уходя со встречки ?
Имхо, корректней сравнивать лидар не с радаром в парктронике(который совсем простецкий), а с сотовой связью, т.к. в лидаре каждый канал независимо модулируется и приемник почти всегда знает, что принял именно свой сигнал. Вероятность того, что у нескольких соседних источников произойдет коллизия, крайне мала. Разве что методами РЭБ засвечивать лидар, излучая в очень широком диапазоне.
То, о чем вы говорите — это беспилотные автомобили level 1 (когда водитель имеет возможность перехватить управление автомобилем, сейчас можно встретить в виде всяких продвинутых круиз контролей и прочего ADAS). А сейчас индустрия нацелена минимум на level 3-5, т.е. на полностью автономные автомобили.
Исследования показывают, что level 1 беспилотники потенциально опасней полностью автономных, т.к. даже при управении level 1 внимание водителя рассредотачивается и он не успеет правильно оценить ситуацию, если автомобиль внезапно отдаст ему управление (да даже сейчас народ самостоятельно управляя автомобилем умудряется залипать в телефоне и попадать по этому поводу в аварии).
Так же считали многие еще пару лет назад, посмеиваясь над попытками Google сделать полностью автономный автомобиль… типа "ADAS систем хватит всем". А потом случилась Tesla и фактически вся индустрия ADAS решений перестала существовать, все R&D переключились на создание полностью беспилотных автомобилей и всего за 1-1.5 года облик индустрии изменился кординально. Т.ч. я бы не был так категоричен.
А что касается беспилотного метро… я тут не компетентен. Где-то можно почитать на эту тему?
облик индустрии изменился кординально
Как раз ADAS индустрия на подьёме.
Про ADAS как набор драйвер асистов (типа нотификаций об ограничении скорости, светофорах, etc.) уже никто не говорит, все что сейчас идет в продакшен — это то, что успели понаписать за предыдущие 5-6 лет. Народ именно на self-driving car сейчас навалился… собственно наглядное тому свидетельство — это то, что по сути один из лидеров индустрии в лице Mobileye активно попер в беспилотники (сначала для Tesla сделали первую версию круиз контроля, теперь что-то там сообща с BMW делают).
Что касается климата, дорог и тд и тп… ну так сейчас никто и не ориентируется на езду по Урюпинску… сейчас все тачки или по Клаифорнии, или по Аризоне катаются, там с дорогами все в порядке. Обобщение систем на другие климатические зоны — это уже следующий шаг (а быть может Яндекс уже этим и занимается, фиг знает).
ADAS как набор драйвер асистов
никто и не ориентируется на езду по Урюпинску
но внедрены были только недавно в Дубаи,
Представьте себе количество датчиков, разных приводов, систем самоочистки и прочих мелочей, необходимых чтобы полностью заменить водителя.
Во — первых, почти все органы чувств принимают участие в управлении автомобилем. Ну это уже до меня написали.
Видимо нет, раз человек способен управлять машиной удаленноуправлять то можно, но это намного опаснее для других участников движения. Или же ехать ну очень медленно и аккуратно что тоже не улучшает безопасность — Вас все будут обгонять. Возможно, после длительных тренировок оператор автомобиля с ДУ сможет управлять им на уровне средненького выпускника автошколы, не больше. Всё таки, машину нужно «чувствовать». Вестибулярный аппарат и «тяжесть» руля позволяют водителю чувствовать сцепление с дорогой, по ощущениям очевидно качество дорожного покрытия, на слух можно определить большинство критических неисправностей автомобиля.
задачи типа: счистить снег/грязь, откопать машину из сугроба, заменить колесо, дотолкать до ближайшей заправкивходят в задачу «автономно таксовать без живого водителя». Колёса, правда и водители часто менять не умеют — вызвают эвакуатор. Заправка тоже мимо т.к виновник такой проблемы — сам водитель, а не дорожные условия.
А что, в человеке-водителе так много различных датчиков? Вроде человеку для управления автомобилем из датчиков достаточно одного лишь зрения, причем монокулярного.
Сейчас тоже вандалы могут лобовуху разбить камнем, но случается это не очень часто.
Вот так вот ваш беспилотный автомобиль будет выглядеть:

Ездить будет только по прямой.
А дальние объекты внезапно становятся не такими уж и дальними.Только те, что впереди по направлению движения. У всех остальных скорость приближения на порядок-два ниже — ну не может двигающаяся параллельно вам со скоростью 100км/ч машина вдруг за 0.1с полететь в вашу сторону с той же скоростью. Для этого она должна испытать боковое ускорение порядка 28g, а тут уж никакая реакция и прогнозирование не помогут.
Есть еще параллельно стоящие на обочине, перекрестки и развороты на трассе. Летающие части машин и груза. Неполное лобовое столкновение попутной впереди/рядом едущей машины со встречкой, как раз получаем резкое смещение с траектории того что осталось по куче векторов.Из всего этого ускорение с перпендикулярной составлюящей в 28g может дать разве что упругое столкновение попутки со встречным грузовиком. Но и тогда оно должно произойти очень «удачно» — чтобы и не перед нами по направлению движения, и при этом чтобы нас всё-таки зацепило.
30 кадров в секунду на сектор.Для фронтального направления, разумеется, не меньше.


Вот всё это сооружение
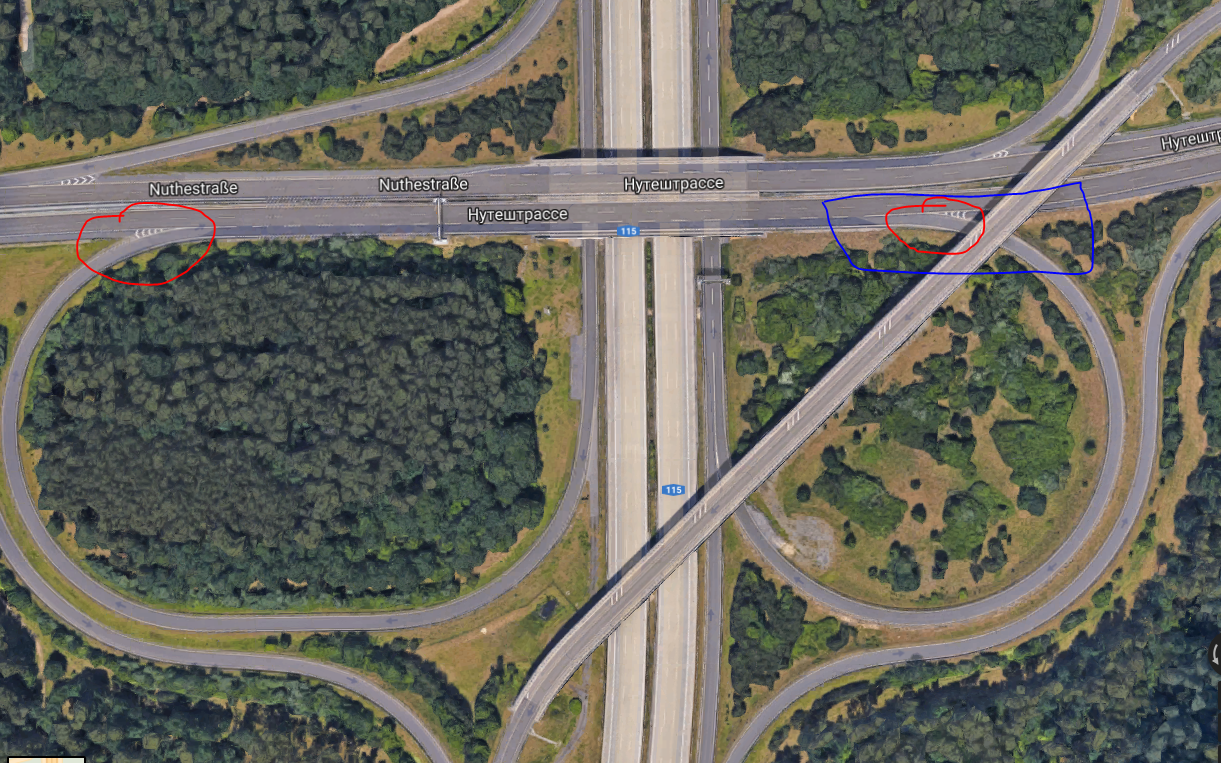
По второй ссылке — вы не видите, разве, что там не просто разметка, а сама дорога после отхода этой полосы становится у́же? (см. размеры красных кружков)
По третьей ссылке — полоса без обочины
Обратите внимание, что на сантиметр левее вашего скриншота ширина «отходящей» полосы — такая-же как после развилки. Это не полоса разгона 600-метровая, а 10-метровое плавное расширение перед поворотом.Да вы издеваетесь, что ли? Вот «на сантиметр» левее:

МКАД по ГОСТам и СНиПам сприектирован на скорость 250 км/чЕсли покажете ГОСТ ил СНиП на скорость в 250км/ч, буду очень благодарен.
модернизация на МКАДе привела к, например, вечной пробке до и после развязки с Боровским шоссе… Там и полосы разгона, и обочины, и дублеры, и полосы разгона-торможения на дублерах… Полный фарш как на лучших автобанах. Но… Круглосуточная пробка… В обе стороны...)О, спасибо за наводку на развязку с Боровским шоссе — это вот эту дорогу с автобусными остановками и тротуарами прямо на ней вы называете «спроектированной на скорость 250км/ч»?

Судя по баннеру ≈2015 годЕсли верить Яндексу — ничего. До сих пор там пешеходный переход, автобусные остановки и съезд к кафешке без тормозной и разгонной полос.

Не совсем понимаю, о чем сейчас идет спор.Моя позиция с самого начала была и не менялась — МКАД не соответствует нормативам для магистралей, скорости в 100 и выше км/ч для неё — неадекватны
МКАД не соответствует нормативам для магистралей. Но спроектирован он по советским еще нормативам из нормативного расчета на скорость движения 250 км/ч.Ещё раз: где вы видели «советские нормативы на скорость движения 250км/ч» с автобусными остановками, отводами без тормозной полосы и тротуарами вдоль края?
Waymo делает всю электронику для робоавтомобилей, лидары подешевели в 10 раз