Здравствуйте, уважаемые участники и гости сайта. Постараюсь быть краток насколько это возможно в данной теме. Бум робототехники последних лет, большое внимание к этой теме не могли оставить меня равнодушным.
Преследуя детскую мечту сделать робота, я попал на форум cyber-place.ru в поисках информации около года назад (не сочтите за рекламу). В своих самых смелых фантазиях, меня грела мысль о создании собственного робота телеприсутствия, с возможностью перемещения в пространстве, видео и двусторонней аудио связью, с удаленным управлением через телефон или компьютер. Вдохновился моделью на базе роутера tplink 3020 с прошивкой Cyberwrt. Не знание темы и большие пробелы в образовании не стали помехой на пути моего маниакального желания добиться результата, как следствие путь проб и ошибок и сгоревшая электроника.
После почти года «учебы на своих ошибках» появились первые результаты, машинка с возможностью управления через интернет на базе Cyberbot -3, за что огромная благодарность ее разработчикам, ребята проделали действительно огромную работу! (Для меня программирование и создание софта это просто космос!) Машинку делали многие, состав оборудования и подробные инструкции есть на бескрайних просторах интернета. Поэтому останавливаться на этом не вижу смысла.

Далее возникла необходимость в автономности устройства, соорудил (из подручных средств) «зарядную станцию», в передней части робота закрепил подпружиненные контакты. Основное питание робота выбрано 4.2В для возможности заряда от 5в блока питания. Для увеличения зарядного тока два модуля TP4056 спаял в параллель. Управлял всем этим хозяйством через интернет по телефону, через браузер.


Наигравшись полученной моделью решил, нужно двигаться дальше. К сожалению так и не нашел способа (думаю что все еще впереди) управлять устройством по на базе одного, главного контроллера.
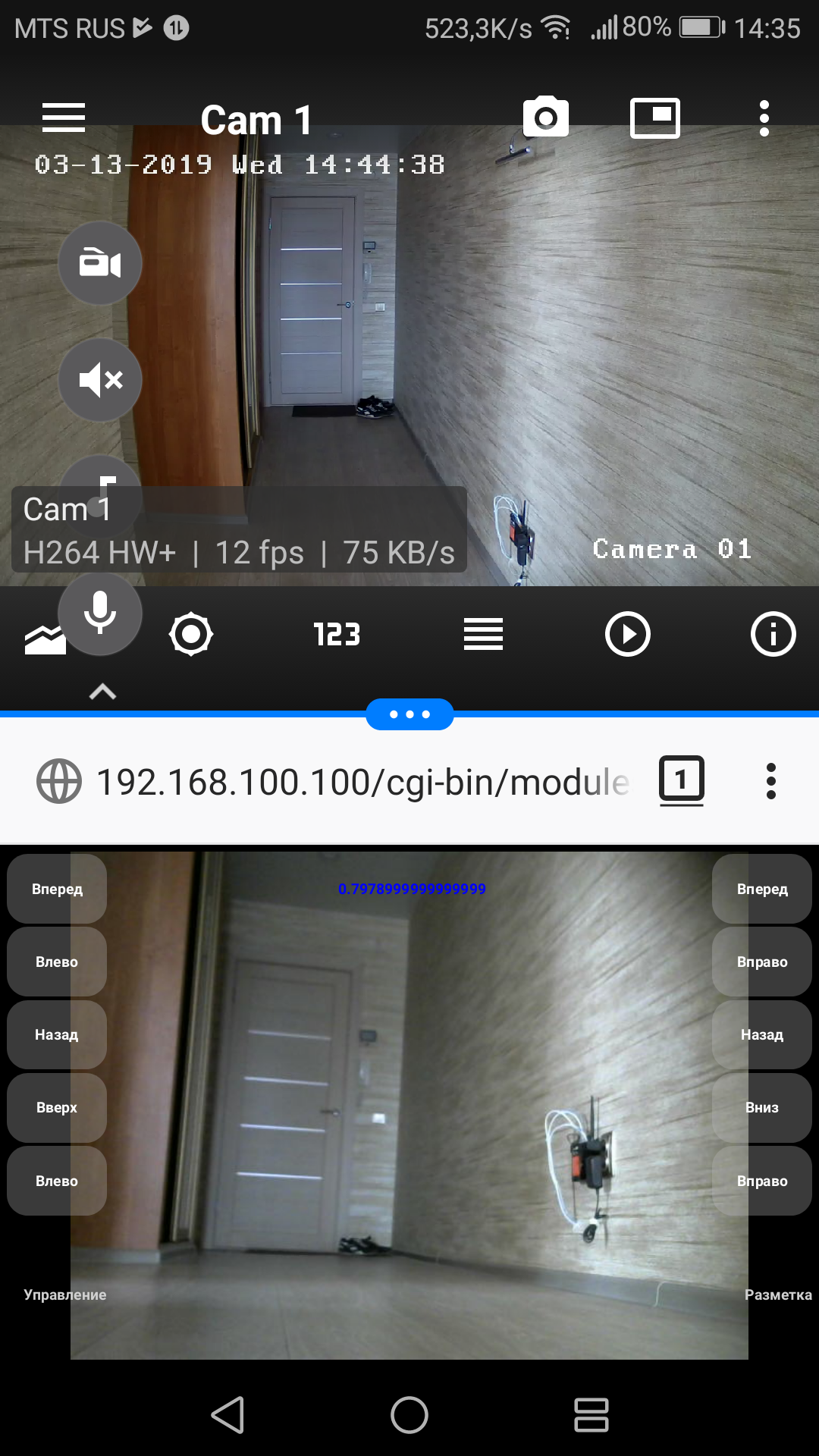
Так как данное оборудование не позволяет организовать двустороннюю аудио связь, не нашел лучше выхода как использовать камеру видеонаблюдения DS-2CD2432F — IW, данная камера при поддержке стороннего софта на андроиде (tinyCam PRO) дает возможность видеоконтроля и двухстороннего аудио. Изначально была (бредовая) идея подключиться к инженерному разъему камеры для того чтобы считать uart, использовать штатное ПО камеры для управления передвижением роботизированной тележки. Использовать ПТЗ камеры для перемещения. Планировал считать какие команды валятся на uart при нажатии влево, вправо, вниз, вверх у камеры которая не является поворотной, далее эти команды гнать на uart ардуино нано, которая должна была управлять моторами, так я хотел решить основную проблему для себя, не умение писать софт. Идея не увенчалась успехом, производитель заблокировал данные команды, кроме сообщения «ptz not support» при нажатии на кнопки ПТЗ в uart ничего не приходило.
Поэтому «камера на колесах», а не робот телеприсутствия стало результатом моих усилий.
Для управления устройством с телефона, использую возможность открывать несколько приложений на андроиде, так называемые «плавающие окна» (В поздних версиях работает без сторонних приложений типа floating apps ). Приходится открывать два приложения, tinyCam PRO для доступа к интерфейсу камеры и браузер для доступа к управлению тележкой.
Итак, результат: электрическая коммутационная коробка в качестве бокса для размещения оборудования tp link 3020 с прошивкой CyberWRT, припаянная антенна, +10дцб в моем случае, ардуино нано получающее по uart команды от вэб интерфейса роутера, монстр мотор шилд для управления мощными мотор редукторами изъятыми из старых игровых автоматов.

Высота робота 165см, вес около 10 кг, питание 12.6В (литиевая сборка 18650 + контроллер заряда с балансиром), банка из — под майонеза вместо головы, в которой спрятана камера, штатный динамик камеры заменен на 5 вт колонку, чтобы меня лучше было слышно. Глаза — два светодиода вставленные в светоотражатели из под фонарей, управляются глаза из интерфейса кибербота, две адресные светодиодные ленты и доп контроллер ардуино про мини для управления ими (спасибо Алексу Гайверу, передрал его проект «огненный светильник»).
Управляется лента через модуль реле, по команде, также по интерфейсу кибербота.
Несуразный внешний вид обусловлен тем, что робота наряжал и поздравлять коллег с 8 марта. (Робот выезжал под музыку из терминатора, управляемый мной из укромного места, заморочился светомузыкой и плавным включение светодиодов, публика была в восторге).


В дальнейшем планирую освоить работу с манипулятором, убрать все «лишнее», подобрать необходимое оборудование (заменить роутер и ардуинку на ESP32) и софт для того чтобы «конструкцией» смогла управлять даже моя бабушка :)) Тема раскрыта не полностью, многие моменты не освещал дабы не затягивать и так длинный пост, если тема вам понравилась, жду вашей критики и советов.
Преследуя детскую мечту сделать робота, я попал на форум cyber-place.ru в поисках информации около года назад (не сочтите за рекламу). В своих самых смелых фантазиях, меня грела мысль о создании собственного робота телеприсутствия, с возможностью перемещения в пространстве, видео и двусторонней аудио связью, с удаленным управлением через телефон или компьютер. Вдохновился моделью на базе роутера tplink 3020 с прошивкой Cyberwrt. Не знание темы и большие пробелы в образовании не стали помехой на пути моего маниакального желания добиться результата, как следствие путь проб и ошибок и сгоревшая электроника.
После почти года «учебы на своих ошибках» появились первые результаты, машинка с возможностью управления через интернет на базе Cyberbot -3, за что огромная благодарность ее разработчикам, ребята проделали действительно огромную работу! (Для меня программирование и создание софта это просто космос!) Машинку делали многие, состав оборудования и подробные инструкции есть на бескрайних просторах интернета. Поэтому останавливаться на этом не вижу смысла.
Далее возникла необходимость в автономности устройства, соорудил (из подручных средств) «зарядную станцию», в передней части робота закрепил подпружиненные контакты. Основное питание робота выбрано 4.2В для возможности заряда от 5в блока питания. Для увеличения зарядного тока два модуля TP4056 спаял в параллель. Управлял всем этим хозяйством через интернет по телефону, через браузер.
Наигравшись полученной моделью решил, нужно двигаться дальше. К сожалению так и не нашел способа (думаю что все еще впереди) управлять устройством по на базе одного, главного контроллера.
Так как данное оборудование не позволяет организовать двустороннюю аудио связь, не нашел лучше выхода как использовать камеру видеонаблюдения DS-2CD2432F — IW, данная камера при поддержке стороннего софта на андроиде (tinyCam PRO) дает возможность видеоконтроля и двухстороннего аудио. Изначально была (бредовая) идея подключиться к инженерному разъему камеры для того чтобы считать uart, использовать штатное ПО камеры для управления передвижением роботизированной тележки. Использовать ПТЗ камеры для перемещения. Планировал считать какие команды валятся на uart при нажатии влево, вправо, вниз, вверх у камеры которая не является поворотной, далее эти команды гнать на uart ардуино нано, которая должна была управлять моторами, так я хотел решить основную проблему для себя, не умение писать софт. Идея не увенчалась успехом, производитель заблокировал данные команды, кроме сообщения «ptz not support» при нажатии на кнопки ПТЗ в uart ничего не приходило.
Поэтому «камера на колесах», а не робот телеприсутствия стало результатом моих усилий.
Для управления устройством с телефона, использую возможность открывать несколько приложений на андроиде, так называемые «плавающие окна» (В поздних версиях работает без сторонних приложений типа floating apps ). Приходится открывать два приложения, tinyCam PRO для доступа к интерфейсу камеры и браузер для доступа к управлению тележкой.
Итак, результат: электрическая коммутационная коробка в качестве бокса для размещения оборудования tp link 3020 с прошивкой CyberWRT, припаянная антенна, +10дцб в моем случае, ардуино нано получающее по uart команды от вэб интерфейса роутера, монстр мотор шилд для управления мощными мотор редукторами изъятыми из старых игровых автоматов.
Высота робота 165см, вес около 10 кг, питание 12.6В (литиевая сборка 18650 + контроллер заряда с балансиром), банка из — под майонеза вместо головы, в которой спрятана камера, штатный динамик камеры заменен на 5 вт колонку, чтобы меня лучше было слышно. Глаза — два светодиода вставленные в светоотражатели из под фонарей, управляются глаза из интерфейса кибербота, две адресные светодиодные ленты и доп контроллер ардуино про мини для управления ими (спасибо Алексу Гайверу, передрал его проект «огненный светильник»).
Управляется лента через модуль реле, по команде, также по интерфейсу кибербота.
Несуразный внешний вид обусловлен тем, что робота наряжал и поздравлять коллег с 8 марта. (Робот выезжал под музыку из терминатора, управляемый мной из укромного места, заморочился светомузыкой и плавным включение светодиодов, публика была в восторге).
В дальнейшем планирую освоить работу с манипулятором, убрать все «лишнее», подобрать необходимое оборудование (заменить роутер и ардуинку на ESP32) и софт для того чтобы «конструкцией» смогла управлять даже моя бабушка :)) Тема раскрыта не полностью, многие моменты не освещал дабы не затягивать и так длинный пост, если тема вам понравилась, жду вашей критики и советов.

