Задача обнаружения объектов на изображении сегодня является одной из ведущих в области машинного зрения. Ее суть заключается в том, чтобы не только классифицировать объект на снимке, но и указать его точное местоположение.
Результаты обнаружения объекта могут быть дополнены информацией о том, насколько далеко расположен данный объект. Задачу измерения расстояния можно решить с помощью камеры глубины Intel RealSense D435, измеряющей глубину в каждой точке.
В данной статье мы решим задачу измерения расстояния до объекта в режиме реального времени с помощью библиотеки OpenCV и технологии RealSense.
Камера RealSense
Для измерения расстояния нам понадобится камера глубины RealSense D435. Для данного примера устанавливать RealSense SDK нет необходимости.
Библиотека pyrealsense2
Весь код, для простоты демонстрации, мы будем писать на Python 3.7, так что нам понадобится пакет pyrealsense2.
Библиотека OpenCV
Также, нам понадобится библиотека OpenCV (подойдет любая версия, начиная с 3.4). Мануал по установке библиотеки можно посмотреть на официальном сайте OpenCV.
Вместе с OpenCV установится еще одна необходимая библиотека – numpy.
Первым делом необходимо выделить объекты на видео. Для обнаружения объектов в режиме реального времени отлично подойдут так называемые one-stage модели (например, Retina Net, SSD, YOLO), которые выигрывают в скорости работы.
Для простоты эксперимента возьмем обученную модель SSDLite Mobilenet v2. Вместо нее может быть использована любая другая модель, которая возвращает координаты объекта в том или ином виде.
Скачать архив с файлами модели можно в официальном репозитории TensorFlow.
Архив содержит замороженный граф вычислений в бинарном формате .pb, а также различные конфиги. Но для использования модели в OpenCV необходимо также иметь граф вычислений в текстовом формате .pbtxt. В архиве он отсутствует, поэтому его нужно сгенерить вручную.
Копируем два скрипта из репозитория OpenCV:
Затем, выполняем следующую команду, указав нужные пути:
На выходе получаем файл graph.pbtxt.
Имеющиеся файлы модели кладем в папку с проектом. В моем случае, это папка models/.
Теперь все готово к разработке. Начнем писать код.
Импортируем необходимые библиотеки и делаем заглушку на метод draw_predictions(), который понадобится нам позже:
Создаем основный объекты:
Инициализируем ssd-модель. Тут нам пригодится .pbtxt файл, который мы сгененировали выше:
Запускаем потоки камеры:
обратите внимание, что мы захватываем цветной поток в формате BGR, так как именно этот формат использует OpenCV по-умолчанию.
Заводим цикл, в которым будем последовательно захватывать и обрабатывать фреймы:
Для дальнейшей обработки фреймов представляем их в виде numpy-массивов:
Применяем ssd-модель для обнаружения:
Рисуем результат в окне:
Пишем условие выхода из цикла:
Закрываем поток:
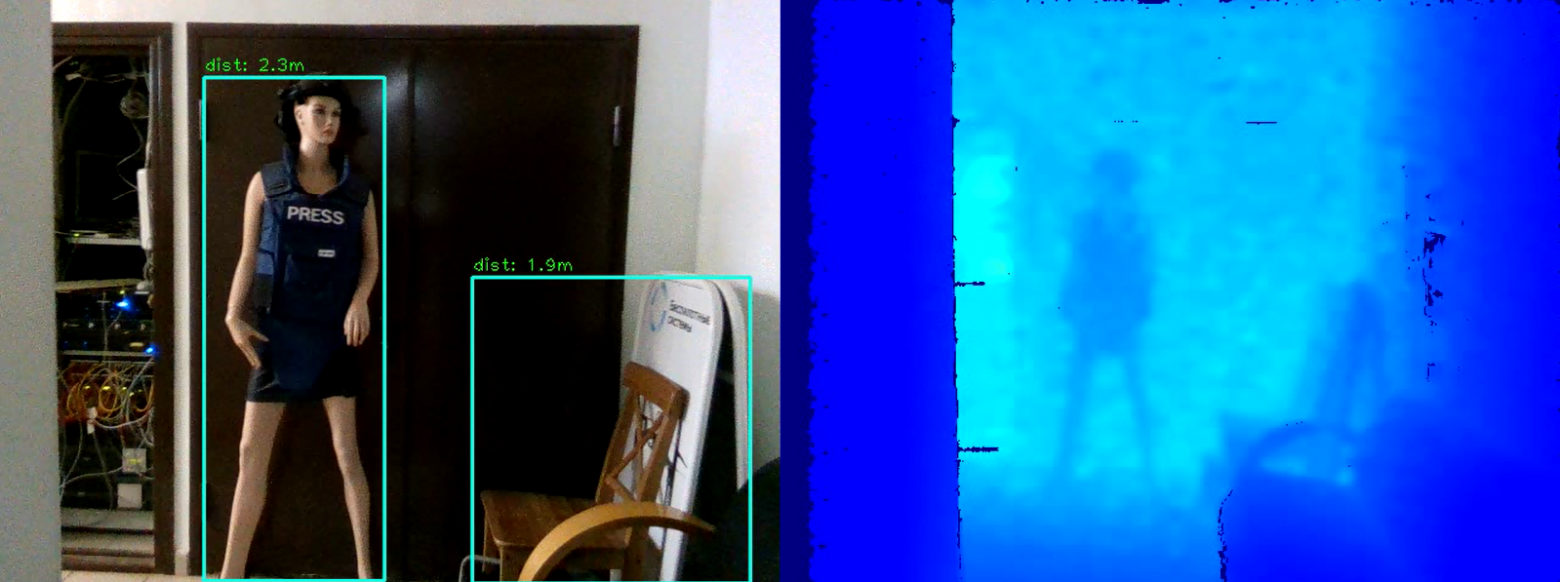
И последнее. Наполняем метод отрисовки draw_predictions(), который мы создали в самом начале. В нем же мы будем считать расстояние до объектов. Вычислять расстояние я решил следующим образом: брать среднее от всех точек расстояний в рамке найденного объекта:
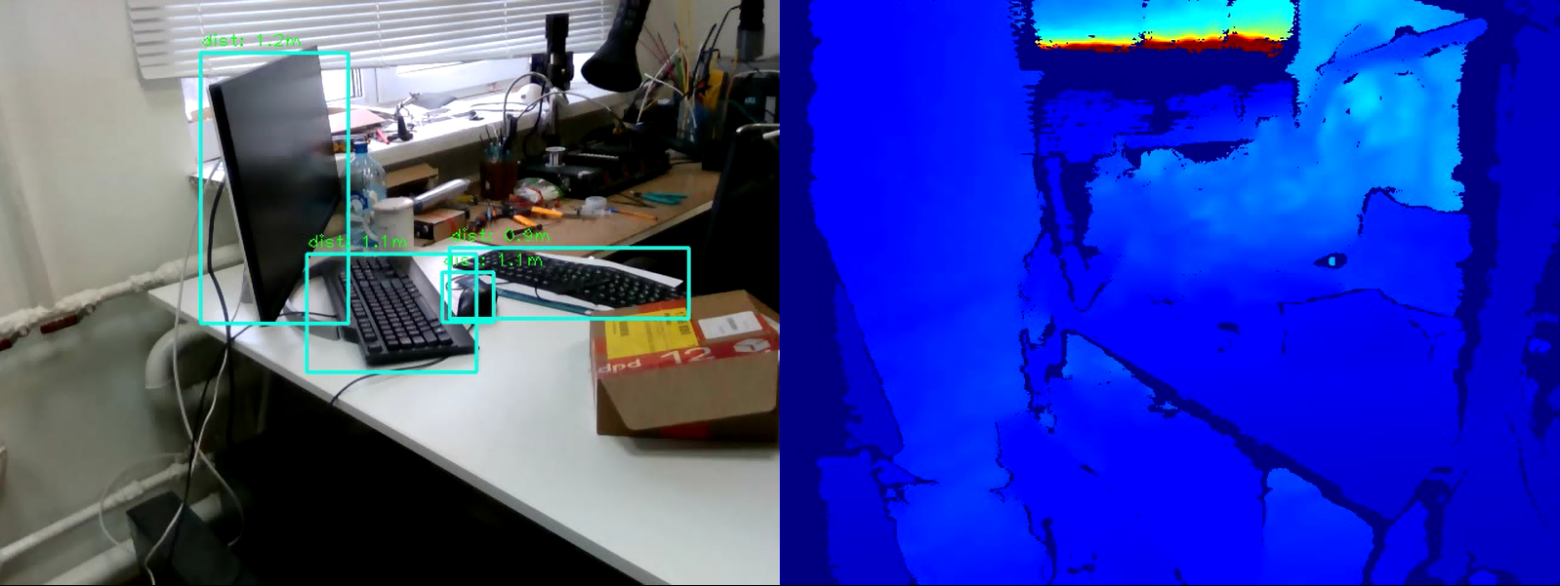
Таким образом, у нас имеется простенький скрипт для оценки расстояния до выделенного объекта. Алгоритм может ошибаться примерно на 50 см, но в целом работает хорошо в пределах четырех метров. Для увеличения точности замера можно применить к карте глубин дополнительные фильтры, заложенные в pyrealsense2, увеличивающие качество изображения, либо модифицировать сам алгоритм вычисления глубины (напр. вычислять взвешенное среднее или замерять расстояние в одной центральной области). Как видите задача не сложная, но интересная.
Результаты обнаружения объекта могут быть дополнены информацией о том, насколько далеко расположен данный объект. Задачу измерения расстояния можно решить с помощью камеры глубины Intel RealSense D435, измеряющей глубину в каждой точке.
В данной статье мы решим задачу измерения расстояния до объекта в режиме реального времени с помощью библиотеки OpenCV и технологии RealSense.
Требования
Камера RealSense
Для измерения расстояния нам понадобится камера глубины RealSense D435. Для данного примера устанавливать RealSense SDK нет необходимости.
Библиотека pyrealsense2
Весь код, для простоты демонстрации, мы будем писать на Python 3.7, так что нам понадобится пакет pyrealsense2.
pip install pyrealsense2
Библиотека OpenCV
Также, нам понадобится библиотека OpenCV (подойдет любая версия, начиная с 3.4). Мануал по установке библиотеки можно посмотреть на официальном сайте OpenCV.
Вместе с OpenCV установится еще одна необходимая библиотека – numpy.
Обнаружение объектов
Первым делом необходимо выделить объекты на видео. Для обнаружения объектов в режиме реального времени отлично подойдут так называемые one-stage модели (например, Retina Net, SSD, YOLO), которые выигрывают в скорости работы.
Для простоты эксперимента возьмем обученную модель SSDLite Mobilenet v2. Вместо нее может быть использована любая другая модель, которая возвращает координаты объекта в том или ином виде.
Скачать архив с файлами модели можно в официальном репозитории TensorFlow.
Архив содержит замороженный граф вычислений в бинарном формате .pb, а также различные конфиги. Но для использования модели в OpenCV необходимо также иметь граф вычислений в текстовом формате .pbtxt. В архиве он отсутствует, поэтому его нужно сгенерить вручную.
Копируем два скрипта из репозитория OpenCV:
- github.com/opencv/opencv/blob/master/samples/dnn/tf_text_graph_ssd.py
- github.com/opencv/opencv/blob/master/samples/dnn/tf_text_graph_common.py
Затем, выполняем следующую команду, указав нужные пути:
python tf_text_graph_ssd.py --input /path/to/model.pb --config /path/to/example.config --output /path/to/graph.pbtxt
На выходе получаем файл graph.pbtxt.
Имеющиеся файлы модели кладем в папку с проектом. В моем случае, это папка models/.
Разработка
Теперь все готово к разработке. Начнем писать код.
Импортируем необходимые библиотеки и делаем заглушку на метод draw_predictions(), который понадобится нам позже:
import pyrealsense2 as rs import numpy as np import cv2 as cv def draw_predictions(pred_img, color_img, depth_image): pass
Создаем основный объекты:
pipeline = rs.pipeline() # <- Объект pipeline содержит методы для взаимодействия с потоком config = rs.config() # <- Дополнительный объект для хранения настроек потока colorizer = rs.colorizer() # <- Пригодится для отрисовки цветной карты глубины spatial = rs.spatial_filter() spatial.set_option(rs.option.holes_fill, 3)
Инициализируем ssd-модель. Тут нам пригодится .pbtxt файл, который мы сгененировали выше:
# Инициализируем модель model = cv.dnn.readNetFromTensorflow( "models/ssdlite_mobilenet_v2_coco_2018_05_09/frozen_inference_graph.pb", "models/ssdlite_mobilenet_v2_coco_2018_05_09/graph.pbtxt" )
Запускаем потоки камеры:
# Запускаем 2 потока: RGB и depth config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30) config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30) profile = pipeline.start(config)
обратите внимание, что мы захватываем цветной поток в формате BGR, так как именно этот формат использует OpenCV по-умолчанию.
Заводим цикл, в которым будем последовательно захватывать и обрабатывать фреймы:
cv.namedWindow("RealSense object detection", cv.WINDOW_AUTOSIZE) try: while True: # Ждем захват фреймов для "цвета" и "глубины" frames = pipeline.wait_for_frames() depth_frame = frames.get_depth_frame() color_frame = frames.get_color_frame() if not depth_frame or not color_frame: continue
Для дальнейшей обработки фреймов представляем их в виде numpy-массивов:
# Конвертируем фреймы в numpy-массивы depth_image = np.asanyarray(depth_frame.get_data()) color_image = np.asanyarray(color_frame.get_data())
Применяем ssd-модель для обнаружения:
# Обнаружение объектов model.setInput(cv.dnn.blobFromImage(color_image, size=(300, 300), swapRB=True, crop=False)) pred = model.forward() draw_predictions(pred, color_image, depth_image)
Рисуем результат в окне:
# Переводим изображение глубины в цвет colorized_depth = cv.applyColorMap(cv.convertScaleAbs(depth_image, alpha=0.03), cv.COLORMAP_JET) # Соединяем и показываем изображения images = np.hstack((color_image, colorized_depth)) cv.imshow("RealSense object detection", images)
Пишем условие выхода из цикла:
# Выйти при нажатии 'ESC' или 'q' key = cv.waitKey(1) & 0xFF if (key == 27) or (key == ord('q')): cv.destroyWindow("RealSense object detection") break
Закрываем поток:
finally: pipeline.stop()
И последнее. Наполняем метод отрисовки draw_predictions(), который мы создали в самом начале. В нем же мы будем считать расстояние до объектов. Вычислять расстояние я решил следующим образом: брать среднее от всех точек расстояний в рамке найденного объекта:
def draw_predictions(pred_img, color_img, depth_image): for detection in pred_img[0,0,:,:]: score = float(detection[2]) # Рисуем рамку только при уверенности модели в обнаружении выше чем на 50% if score > 0.5: left = detection[3] * color_img.shape[1] top = detection[4] * color_img.shape[0] right = detection[5] * color_img.shape[1] bottom = detection[6] * color_img.shape[0] cv.rectangle(color_img, (int(left), int(top)), (int(right), int(bottom)), (210, 230, 23), 2) # Измеряем расстояние до объекта depth = depth_image[int(left):int(right), int(top):int(bottom)].astype(float) depth_scale = profile.get_device().first_depth_sensor().get_depth_scale() depth = depth * depth_scale dist,_,_,_ = cv.mean(depth) dist = round(dist, 1) cv.putText(color_img, "dist: "+str(dist)+"m", (int(left), int(top)-5), cv.FONT_HERSHEY_PLAIN, 1, (0, 255, 0), 1)
Полный код
import pyrealsense2 as rs import numpy as np import cv2 as cv def draw_predictions(pred_img, color_img, depth_image): # <- Метод для отрисовки рамки for detection in pred_img[0,0,:,:]: score = float(detection[2]) # Рисуем рамку только при уверенности модели в обнаружении выше чем на 50% if score > 0.5: left = detection[3] * color_img.shape[1] top = detection[4] * color_img.shape[0] right = detection[5] * color_img.shape[1] bottom = detection[6] * color_img.shape[0] cv.rectangle(color_img, (int(left), int(top)), (int(right), int(bottom)), (210, 230, 23), 2) # Измеряем расстояние до объекта depth = depth_image[int(left):int(right), int(top):int(bottom)].astype(float) depth_scale = profile.get_device().first_depth_sensor().get_depth_scale() depth = depth * depth_scale dist,_,_,_ = cv.mean(depth) dist = round(dist, 1) cv.putText(color_img, "dist: "+str(dist)+"m", (int(left), int(top)-5), cv.FONT_HERSHEY_PLAIN, 1, (0, 255, 0), 1) pipeline = rs.pipeline() # <- Объект pipeline содержит методы для взаимодействия с потоком config = rs.config() # <- Дополнительный объект для хранения настроек потока colorizer = rs.colorizer() # <- Пригодится для отрисовки цветной карты глубины # Инициализируем модель model = cv.dnn.readNetFromTensorflow( "models/ssdlite_mobilenet_v2_coco_2018_05_09/frozen_inference_graph.pb", "models/ssdlite_mobilenet_v2_coco_2018_05_09/graph.pbtxt" ) # Запускаем 2 потока: RGB и depth config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30) config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30) profile = pipeline.start(config) cv.namedWindow("RealSense object detection", cv.WINDOW_AUTOSIZE) try: while True: # Ждем захват фреймов для "цвета" и "глубины" frames = pipeline.wait_for_frames() depth_frame = frames.get_depth_frame() color_frame = frames.get_color_frame() if not depth_frame or not color_frame: continue # Конвертируем фреймы в numpy-массивы depth_image = np.asanyarray(depth_frame.get_data()) color_image = np.asanyarray(color_frame.get_data()) # Обнаружение объектов model.setInput(cv.dnn.blobFromImage(color_image, size=(300, 300), swapRB=True, crop=False)) pred = model.forward() draw_predictions(pred, color_image, depth_image) # Переводим изображение глубины в цвет colorized_depth = cv.applyColorMap(cv.convertScaleAbs(depth_image, alpha=0.03), cv.COLORMAP_JET) # Соединяем и показываем изображения images = np.hstack((color_image, colorized_depth)) cv.imshow("RealSense object detection", images) # Выйти при нажатии 'ESC' или 'q' key = cv.waitKey(1) & 0xFF if (key == 27) or (key == ord('q')): cv.destroyWindow("RealSense object detection") break finally: pipeline.stop()
Заключение
Таким образом, у нас имеется простенький скрипт для оценки расстояния до выделенного объекта. Алгоритм может ошибаться примерно на 50 см, но в целом работает хорошо в пределах четырех метров. Для увеличения точности замера можно применить к карте глубин дополнительные фильтры, заложенные в pyrealsense2, увеличивающие качество изображения, либо модифицировать сам алгоритм вычисления глубины (напр. вычислять взвешенное среднее или замерять расстояние в одной центральной области). Как видите задача не сложная, но интересная.

