Однажды в институте зав кафедры рассказывал нам о нашей будущей профессии:
“Наша профессия очень важна и ответственна. Сейчас вы работаете над обликом будущего флагмана Российской авиации. Вы сыпете идеями, пытаетесь предугадать задачи, которые он будет решать, берете на себя ответственность и принимаете решения. А через 15 лет, когда самолет наконец построят, всем будут раздавать почести, но про вас уже никто не вспомнит”.
Такая агитация мне не понравилась, ждать 15 лет результата я не готов.
Авиация — высокоразвитая отрасль, но высокие требования по надежности и распланированное будущее не позволяют внедрять новые технологии быстро. А беспилотникам же наоборот, никаких особых требований пока нет, вот они и растут как грибы после дождя, заполняя собой ниши авиа мониторинга, рекламы, помощи сельскому хозяйству, видеосъемки и подобные.
Так я и решил, пускай они там как-нибудь без меня строят свои истребители, а я, пока молод и горяч, пойду в беспилотники. Благо что авиамодельное прошлое имеется.
Какие есть пути развития авиации? На мой взгляд, авиация может развиваться двумя путями:
- Использование инновационных технологий для комплектующих (новые эффективные силовые установки с малым весом, авионика и прочее).
- Изменение аэродинамической схемы.
Мне больше импонирует изменение аэродинамической схемы самолета. Этим путем появились такие аэродинамические схемы как “утка” и “летающее крыло”. Но инженерам этого было мало, им хотелось, чтобы аэродинамика изменялась прямо в полете. Так появились самолеты с изменяемой геометрией крыла (Су-24, Ту-22М, Ту-160, F-111 и им подобные), самолеты с управляемым вектором тяги (Миг-29ОВТ, Миг-35, Су-30, 37, 57, F-22 и др) и, конечно же, конвертопланы (например, всем известный Bell V-22 Osprey).
Это все, конечно, хорошо, но не совсем мне по душе. Идея с изменяемой геометрией крыла интересна, но надо, чтоб если складывались крылья, то так, чтоб совсем, а не жалкие несколько градусов. А вот идея с поворотными силовыми установками мне импонирует. Так и родилась идея сделать свой конвертоплан. Схематично нашу идею можно описать следующим образом:
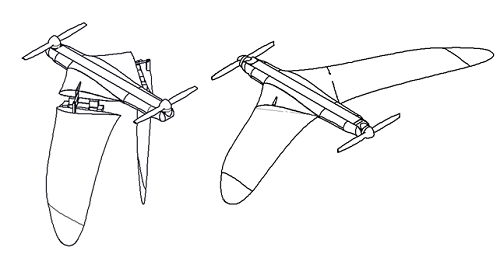
Я собрал команду и вскоре мы определились. Идея нашего конвертоплана заключалась в объединении самолетной схемы летающее крыло и вертолетной продольной двухвинтовой схемы. Мы решили, что крылья будут складываться вниз, причем не половина крыла, как у корабельных самолетов, а целиком, чтобы не создавать дополнительное сопротивление при наборе высоты в вертолетном режиме.
Конвертоплан будет взлетать со сложенными вертикально вниз крыльями, затем, моторы будут поворачиваться, а крылья плавно раскрываться. Сам полет будет проходить в режиме летающее крыло, а при необходимости можно будет всегда зависнуть на месте. При посадке он может садиться вертикально, на брюхо или, в случае экстренной посадки, — на парашюте.
Какие преимущества у данной аэродинамической схемы?
- За счет огромного крыла мы получаем высокое аэродинамическое качество в самолетном режиме, что значительно увеличивает дальность полета в сравнении с другими конвертопланами.
- Вертикальный взлет и посадка (не требует ВПП).
- Возможность зависать в воздухе.
Закончим введение и перейдем к сути. Для реализации проекта нам необходимо:
- Изготовить прототип.
- Создать систему стабилизации за счет управляемых векторов тяги.
- Реализовать алгоритмы переходного процесса во время смены режимов полета.
- Провести тестовые полеты, отладить систему.
- Коммерческий полет.
Прототип 1
Мы приступили к созданию первого прототипа. У нас не было никакого особого оборудования, только руки и базовые знания. Начали с того, что начертили модель в 3D.

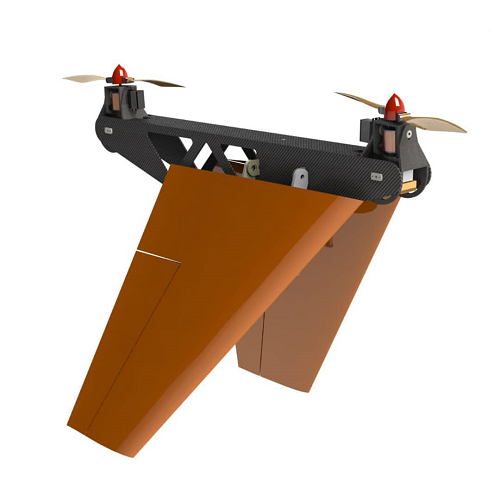
Построенный летательный аппарат выглядел следующим образом:


Получилась первая модель, для которой мы сразу же подготовили испытательный стенд.
Написали простенький код для управления моторами и запустили этого монстра сначала на стенде, а потом и в воздухе. Мы с ней съездили на несколько конференций, где получали неоднозначные отзывы. При изготовлении первого прототипа в расчеты мы не углублялись, и единственная лтх, которую мы можем предоставить, это его габариты. Круизная скорость рассчитывалась на 100 км/час, но как-то не сложилось с дальними полетами и записью хоть каких-то характеристик.
| габариты в сложенном состоянии | 650мм x 400мм x 600мм |
| размах | 1100мм |
| длина | 650мм |
| диаметр пропеллеров | 11 дюймов |
| снаряженная масса | 3 кг |
Не смотря на то, что построенная модель не оправдала наших ожиданий, она, несомненно, показала, что подобное устройство все же имеет право на жизнь и еще позволила сделать следующее:
- Определиться с конструкцией механизма наклона моторов.
- Проверить возможность реализации такой модели.
- Сформулировали облик модели.
- Получили наглядную модель всех механизмов.
Признаться честно, мы сами не ожидали, что у нас получится сделать прототип, и что он будет функционировать.
После у всех участников данного проекта началась учеба в разных институтах, и мы забросили этот проект. Постепенно команда куда-то разъехалась. Когда учеба в институте подходила к концу, и приближался дипломный проект, у всех нас всплыла идея вернуться к этому летательному аппарату. Ни у кого не возникнет сомнений что подобный агрегат многогранен, и работы там найдется всем и всегда. Поэтому каждый взял себе кусочек который максимально близко подходил его специальности…
Прототип 2
Встретились как-то красотка, сантехник, турист, айтишник и школьник. И сантехник говорит, “Диплом близко, надо строить самолет”.
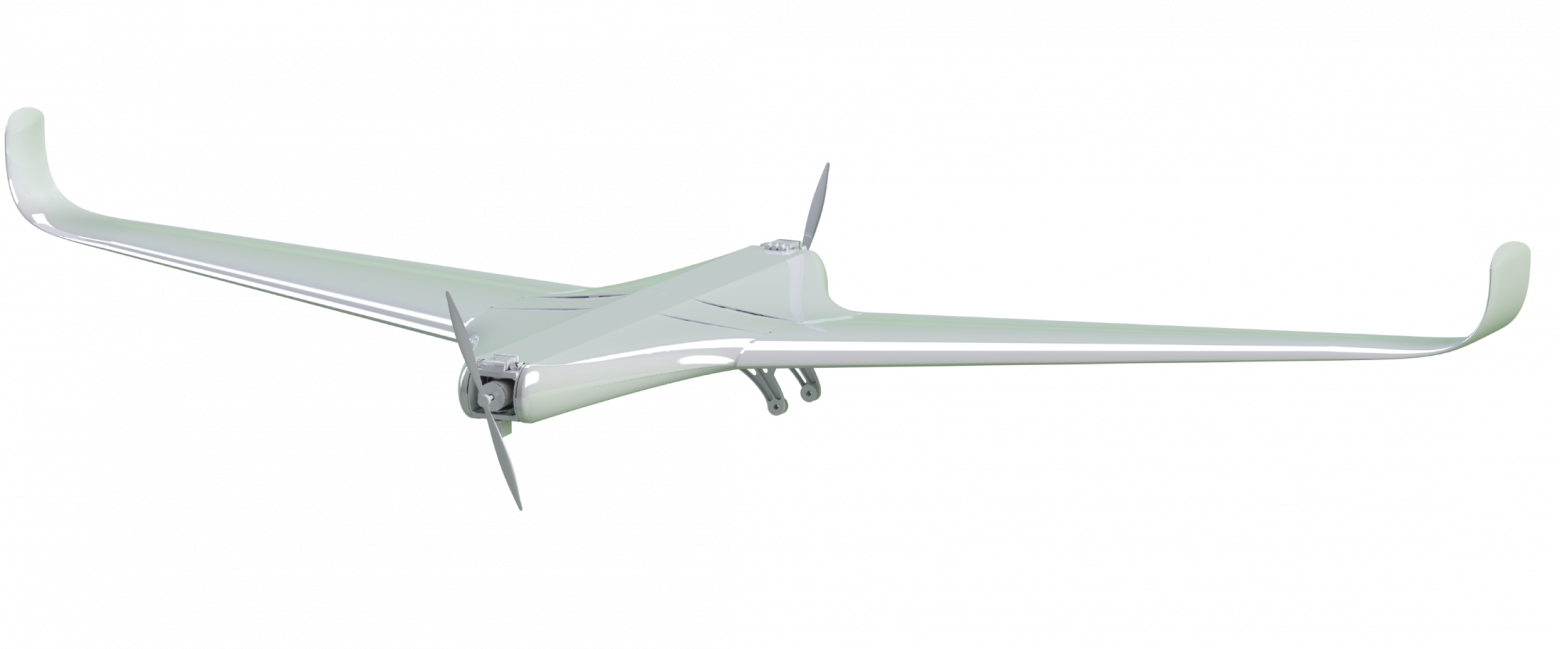
Мы собрались снова и начали делать второй прототип. Теперь в нашем распоряжении были: гараж, оборудованный по последнему слову техники, токарный станок, ЧПУ, 3D принтер, а также опыт и знания, полученные в институте. Сразу определили целевое назначение беспилотника, он будет мониторить нефтепроводы. Под эту задачу подобрали оптимальные ЛТХ (это отдельная история). Рассчитали и начертили все агрегаты и узлы. Рассчитали систему спасения и сшили парашют. Разработали систему раскрывания и складывания крыльев. Изготовили прототип со следующими ЛТХ:
| Технические характеристики | ||
| Режим | самолетный | вертолетный |
| Длительность полета | до 2,5 часов | до 20 минут |
| Максимальная протяженность маршрута | 100 км | 10 км |
| Скорость полета | 70-150 км/ч | 0-50 км/ч |
| Максимальная взлетная масса | 20 кг | |
| Макс. масса полезной нагрузки | 2 кг | |
| Габаритные размеры | Размах 3200мм, длина 1600мм |
1500мм х 900мм х 1600мм |
| ГМаксимальная высота полета | 2500 м | 1200 м |
| Двигатель | электрический | |
| Взлет / посадка | аварийная система посадки на парашюте | Вертикально в автоматическом режиме с использованием док станции |
| Время взлета/посадки | - | 5 мин |
| Летные характеристики | ||
| Режим | самолетный | вертолетный |
| Крейсерская скорость | 100 км/ч | 37 км/ч |
| Скороподъемность | 1,3 м/с | 2,5 м/с |
| Скорость полета | 70-150 км/ч | 0-50 км/ч |
| Скорость необходимая для трансформации | 45 км/ч | - |
| Скорость сваливания | 42 км/ч (1,5кг полезной нагрузки) | - |
| Аэродинамическое качество | 11,6 | 0 |





С построенным прототипом мы принимали участие в МАКС-2019, поучавствовали в конкурсе от “Вертолетов России” и продолжаем заниматься его доработками в свободное от отдыха время.
Выводы
Идти своим путем всегда невероятно сложно. Нам постоянно говорят, что это, конечно здорово, но не будет работать и никогда не полетит, либо у нас не хватит желания довести это до функционального состояния. Однако мы рады слышать конструктивную критику.
Мы все еще «горим» желанием увидеть задуманное в воздухе и прилагаем к этому все возможные усилия.
P.S
В данном проекте при постановке целей и задач я руководствуюсь требованиями и условиями предъявляемыми к ДПЛА в задачах мониторинга, применение всех идей подходов и созданных прототипов в других отраслях может быть рассмотрено только после достижения поставленных сейчас целей. Такой подход считаю рациональным в сложившихся обстоятельствах с ограниченными материальными, трудовыми и временными ресурсами. Подобными суждениями я пользовался довольно часто в процессе работы над этим проектом, потому что с нетерпением хочу увидеть в действии то, чем занимаюсь.

