Вместо вступления
Статья содержит пример ручной оптимизации критического участка прикладной программы применительно к бюджетным микроконтроллерам stm32, повышающий производительность в 5 и более раз по сравнению с библиотечной функцией.
В прикладных программах часто требуется извлечение квадратного корня. Функция sqrt включена в стандартную библиотеку языка С и оперирует действительными числами:
double sqrt (double num); long double sqrtl (long double num);
Бюджетные микроконтроллеры работают, преимущественно, с целыми числами; регистров для обработки действительных чисел у них, как правило, нет.
В этих условиях целочисленное извлечение квадратного корня сопровождается не только высокими вычислительными затратами, но и потерей точности — Пример 1.
Пример 1: Потеря точности в прямом и обратном преобразованиях
// исходные значения uint32_t L1 = 169; uint32_t L2 = 168; // прямое преобразование uint32_t r1 = ( uint32_t )sqrt( ( double ) L1 ); uint32_t r2 = ( uint32_t )sqrt( ( double ) L2 ); // обратное преобразование L1 = r1*r1; // r1 = 13 L2 = r2*r2; // r2 = 12 // результат преобразований // L1 = 169 — было 169 // L2 = 144 — было 168, ошибка двойного преобразования 14%
Постановка задачи
Поднять точность целочисленных вычислений sqrt через округление до ближайшего целого.
По возможности, увеличить производительность.
Решение задачи
Написать несколько функций-кандидатов для извлечения квадратного корня на основе разных алгоритмов.
Выбрать лучший из них, сравнивая на соответствие поставленной задаче.
Первая функция-кандидат создаётся на основе стандартной библиотеки. Далее именуем её "sqrt_fpu" — Пример 2.
Пример 2: Расчёт целочисленного корня алгоритмом sqrt_fpu
uint16_t sqrt_fpu ( uint32_t L ) { if ( L < 2 ) return ( uint16_t ) L; double f_rslt = sqrt( ( double ) L ); uint32_t rslt = ( uint32_t ) f_rslt; if ( !( f_rslt - ( double ) rslt < .5 ) ) rslt++; return ( uint16_t ) rslt; }
Достоинства sqrt_fpu:
- решена задача округления результата до ближайшего целого.
Недостатки sqrt_fpu:
- потеря производительности через применение операций с плавающей точкой при отсутствии FPU;
- сомнительный потенциал оптимизации из-за вызова библиотечной функции.
Принимаем sqrt_fpu за эталон.
Функция-кандидат №2 интересна уже на уровне описания алгоритма:
«Квадратный корень из целого равен количеству возрастающих положительных нечётных чисел, вычитаемых последовательно из целого числа, начиная с единицы, до достижения нуля.»
Именуем далее этот алгоритм "sqrt_odd" — Пример 3.
Пример 3: Расчёт целочисленного корня алгоритмом sqrt_odd
uint16_t sqrt_odd ( uint32_t L ) { if ( L < 2 ) return ( uint16_t ) L; uint16_t div = 1, rslt = 1; while ( 1 ) { div += 2; if ( ( uint32_t ) div >= L ) return rslt; L -= div, rslt++; } }
Алгоритм возвращает квадратный корень, округлённый отбрасыванием
дробной части.
Достоинства sqrt_odd:
- компактный код;
Недостатки sqrt_odd:
- отбрасывание дробной части вместо округления;
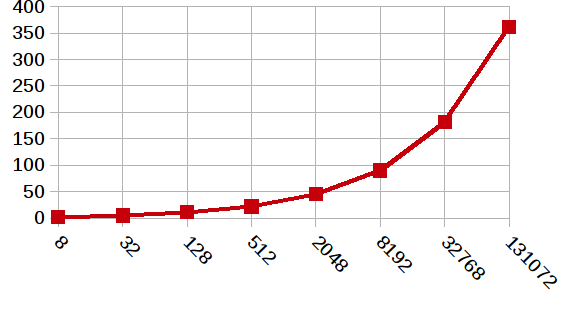
- экспоненциальная зависимость вычислительных затрат от аргумента; 150 циклов и более в диапазоне 1E+4+ — Иллюстрация 1;
- отсутствие очевидных путей алгоритмической оптимизации.
Иллюстрация 1: Зависимость числа итераций sqrt_odd от аргумента
Функция-кандидат №3. Приближённое вычисление квадратного корня методом Ньютона:
«Корень из числа равен половине суммы приближённого корня и частного числа с приближённым корнем»:
Rj = ( N / Ri + Ri ) / 2
Назовём простую модернизацию метода Нютона для целых чисел условно "sqrt_new" — Пример 4.
Пример 4: Расчёт целочисленного корня алгоритмом sqrt_new
uint16_t sqrt_new ( uint32_t L ) { if ( L < 2 ) return ( uint16_t ) L; uint32_t rslt, div; rslt = L; div = L / 2; while ( 1 ) { div = ( L / div + div ) / 2; if ( rslt > div ) rslt = div; else return ( uint16_t ) rslt; } }
Достоинства sqrt_new:
- превосходство в скорости счёта эталона sqrt_fpu и кандидата №2 sqrt_odd, как минимум, в четыре раза;
Недостатки sqrt_new:
- отбрасывание дробной части вместо округления;
Профилирование sqrt_new демонстрирует (Иллюстрация 2):
- практически линейную зависимость числа итераций от аргумента;
- нормальное распределение числа итераций внутри под диапазонов аргумента.
Иллюстрация 2: Зависимость итераций sqtr_new от аргумента (!)
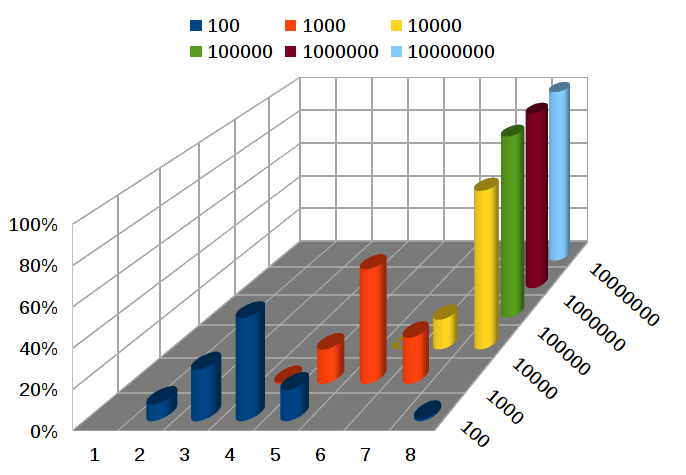
(!) — Вычисления результата в диапазоне 10e5+ требуют 8 и более циклов.
Алгоритм sqrt_new оптимизируется обычным способом:
- уменьшение числа итераций через подбор начального значения делителя до начала цикла;
- отказ, по-возможности, от математических операторов в пользу битовых;
- учёт младшего бита (округление) в целочисленных арифметических вычислениях.
Итоговый алгоритм на основе функции-кандидата №3 будем называть "sqrt_evn" (Пример 5).
Функция sqrt_evn принимает целое без знака и возвращает целочисленный квадратный корень, округлённый до ближайшего целого.
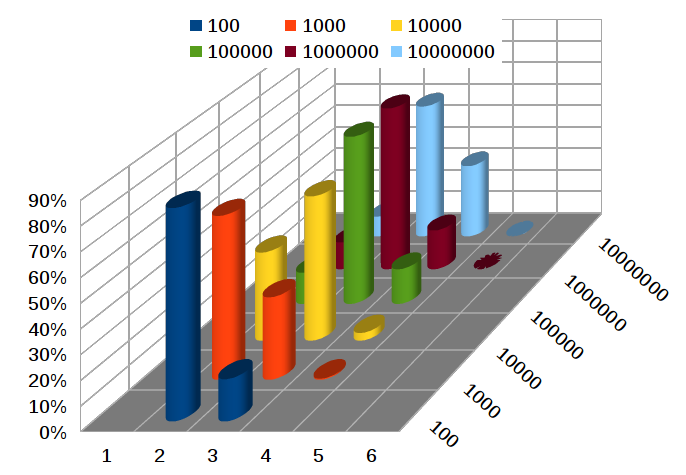
В среднем sqrt_evn затрачивает от 2-х до 5-и циклов на вычисление одного квадратного корня на всём множестве значений аргумента [ 0… 0xFFFFFFFF ], опережая sqrt_new приблизительно на 40%.
В наиболее "употребимом" диапазоне значений [ 1… 10 000 000 ] sqtr_evn вычисляет квадратный корень в среднем за 2-3 цикла.
Наблюдается близкая к линейной зависимость числа итераций sqrt_evn от значения аргумента — Иллюстрация 3.
Иллюстрация 3: Зависимость числа итераций sqtr_evn от аргумента
Собственно, исходный текст алгоритма sqrt_evn — Пример 5.
Пример 5: Модифицированный алгоритм по методу Ньютона sqrt_evn
uint16_t sqrt_evn ( uint32_t L ) { if ( L < 2 ) return ( uint16_t ) L; uint32_t div; uint32_t rslt; uint32_t temp; if ( L & 0xFFFF0000L ) if ( L & 0xFF000000L ) if ( L & 0xF0000000L ) if ( L & 0xE0000000L ) div = 43771; else div = 22250; else if ( L & 0x0C000000L ) div = 11310; else div = 5749; else if ( L & 0x00F00000L ) if ( L & 0x00C00000L ) div = 2923; else div = 1486; else if ( L & 0x000C0000L ) div = 755; else div = 384; else if ( L & 0xFF00L ) if ( L & 0xF000L ) if ( L & 0xC000L ) div = 195; else div = 99; else if ( L & 0x0C00L ) div = 50; else div = 25; else if ( L & 0xF0L ) if ( L & 0x80L ) div = 13; else div = 7; else div = 3; rslt = L; while ( 1 ) { temp = L / div; temp += div; div = temp >> 1; div += temp & 1; if ( rslt > div ) rslt = div; else { if ( L / rslt == rslt - 1 && L % rslt == 0 ) rslt--; return ( uint16_t ) rslt; } } }
В цикле повторяется всего одна «тяжёлая» операция — деление:
{ temp = L / div;… }.
Другие операторы в цикле выполняются в среднем за 1 такт.
Область определения аргумента функции делится на под диапазоны. Для каждого из них устанавливается оптимальный начальный делитель.
Блок условных операторов до начала цикла, задающий начальное значение делителя для каждого под диапазона, слабо влияет на производительность sqrt_evn.
Уменьшение вложенности блока { if } сдвигает разброс числа итераций в диапазонах значений аргумента в большую сторону, увеличивая среднее время вычисления квадратного корня (Иллюстрация 2).
Критерий подбора делителя — минимизация итераций на множестве значений аргумента.
Выбор начальных значений делителя.
Четыре младшие константы [ 3, 7, 13, 25 ] подобраны «на глазок». Далее найдена аппроксимирующая функция (экспонента). Остальные определены по аппроксимирующей формуле.
Погрешности определения начального значения делителя компенсируются сдвигом границ подмножеств значений аргумента — битовые маски в условных операторах.
Сравнительное тестирование алгоритмов
Испытательный стенд:
- Оборудование: STM32F0308-DISCO, на базе MCU STM32F030R8T6
- Сборочная среда: STM32CubeIDE
- Вывод: на терминал рабочей станции через USB-UART PL2303HX
Параметры стенда:
- Начальная настройка оборудования: по умолчанию
- Частота тактирования: CPU — 48 MHz, UART (RS485) — 9600 bit/s
- Профиль сборки: стандартный, Release
- Дополнительные ключи: MCU GCC Linker: Miscellaneous: -u _printf_float
Сравнивались алгоритмы sqrt_fpu, sqrt_new и sqrt_evn.
В процессе теста каждый алгоритм производил 100 000 вычислений квадратного корня в 3-х диапазонах значений аргумента — Иллюстрация 4.
Иллюстрация 4: Процесс тестирования
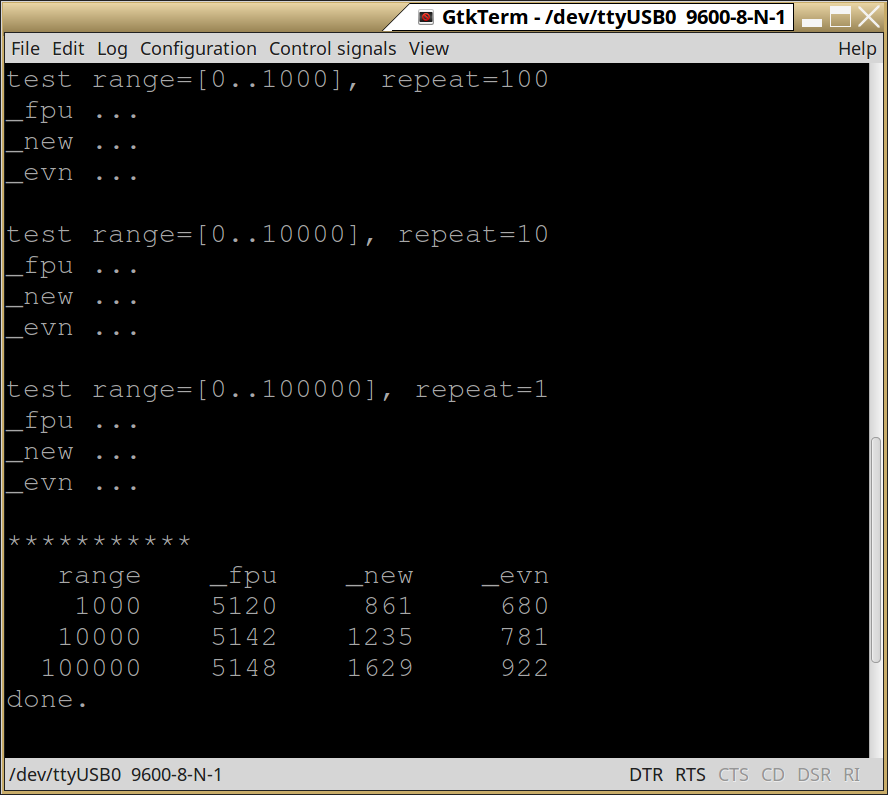
В результирующей таблице затраченное на тест время в миллисекундах.
Стабильность — главное преимущество sqrt_fpu, показавшего слабую зависимость от значения аргумента. Одним словом — эталон.
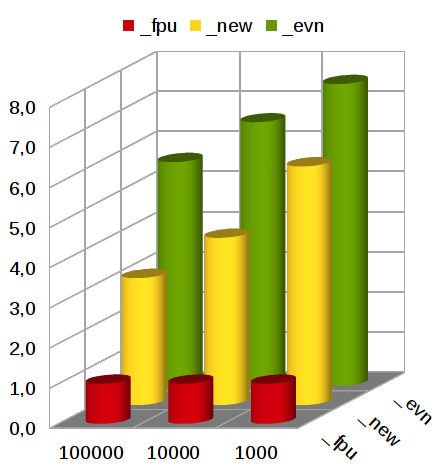
Графики ниже демонстрируют то же самое, что и скриншот (Иллюстрация 4), но в более наглядном виде.
Качественное сравнение (Иллюстрация 5) показывает во сколько раз одни алгоритмы быстрее других.
Иллюстрация 5: Качественное сравнение алгоритмов
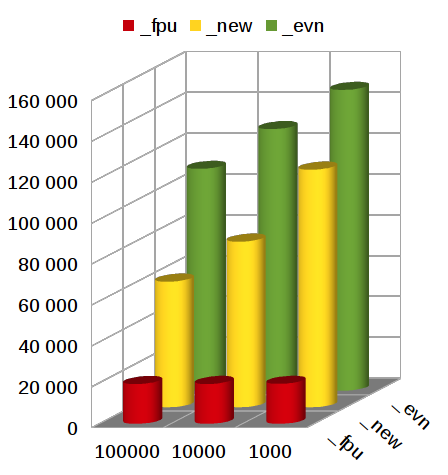
Количественное сравнение (Иллюстрация 6) демонстрирует различие производительности, выраженное в результатах за 1 секунду.
За одну секунду sqrt_fpu вычисляет 19 531, а sqrt_evn 147 059 квадратных корней; sqrt_evn в ~7,5 раз быстрее, чем sqrt_fpu.
Иллюстрация 6: Количественное сравнение алгоритмов
Вместо заключения
Существует много эффективных способов повышения производительности прикладных программ, например, применение старших моделей чипов, содержащих модуль FPU для действительных чисел.
В то же время, ручная алгоритмическая оптимизация кода может оказаться эффективной при массовом производстве мелких IoT, за счёт применения бюджетных моделей микроконтроллеров, освобождая для старших моделей пространство сложных задач.

