В этой статье я решил сделать небольшое отступление от общей линии повествования и зарулю на дорогу Linux. За то непродолжительное время, что я работаю с Zynq 7000, в тематических чатах я видел много вопросов насчет того, как запустить Linux на отладке. Я в общем-то недолго думая сел проштудировал документацию, примеры и завёл его своими руками под ту плату, что у меня есть в распоряжении. После этого я решил обобщить свои знания по этому вопросу и описать процедуру сборки, подготовки загрузочного образа Linux, который включает в себя U-boot, Device Tree Source, RootFS, и само ядро Linux. В дополнение к этому, я решил немного усложнить задачу и выяснил, как можно поморгать светодиодом подключенным к PL-части устройства из пространства пользователя Linux.
Обо всём этом я написал в этой статье. Всем интересующимся - добро пожаловать под кат.
Важно! Перед началом повествования, хотелось бы заранее оговориться, что основная цель, которую я преследую при написании этой статьи - рассказать о своем опыте, с чего можно начать, при изучении отладочных плат на базе Zynq. Я не являюсь профессиональным разработчиком под ПЛИС и SoC Zynq, не являюсь системным программистом под Linux и могу допускать какие-либо ошибки в использовании терминологии, использовать не самые оптимальные пути решения задач, etc. Но отмечу, что любая конструктивная и аргументированная критика только приветствуется. Что ж, поехали…
Постановка задачи
Основная задача, которая стоит перед нами - запустить Linux на отладочной плате и увидеть приглашение на ввод логина/пароля и “дрыгнуть” ножкой подключенной к PL, на которой находится целевой светодиод D4. Подразумевается, что на плате заведётся основная периферия, такая как оперативная память, SDIO-контроллер для работы с microSD-картой, и хотелось бы, чтобы завелся Ethernet, чтобы иметь доступ к сети.
Итак. Последовательность шагов, которые нам необходимо сделать для того, чтобы запустить плату:
Подготовить BSP для последующего использования в Xilinx SDK (буду пользоваться именно SDK, т.к. Vitis еще не осваивал);
Проверить, что конфигурация в PL рабочая, используя простейшее baremetal-приложение, которое запустим в PS;
Подготовить First Stage Bootloader;
Подготовить cross-compile tool и установить зависимости, для того, чтобы было чем компилировать сырцы для нашей платы;
Подготовить U-Boot, сконфигурировать его;
Подготовить Linux kernel для последующей загрузки;
Подготовить образ RootFS;
Скомпоновать необходимые файлы и подготовить их к загрузке с microSD-карты;
Проверить, что Linux загружается, инициализирована вся необходимая периферия и есть доступ к локальной сети
Проверить, что мы можем мигнуть светодиодом подключенным к PL из Linux используя sysfs.
Подготовка BSP с помощью Vivado
Первым шагом, создаем новый проект в Vivado (как это сделать - я писал в предыдущих статьях по Zynq). После того как проект создан, создаем новый Block Design и добавляем к нему Zynq Processing System.
После нам будет предложено запустить мастер автоматизации. Запускаем его и нажимаем Ok, оставив значения по умолчанию.

Следующим шагом необходимо корректно сконфигурировать процессорную систему. Двойным кликом открываем мастер настройки Zynq Processing System.
Переходим в меню PS-PL Configuration. Первым делом проверяем, что во вкладке AXI Non Secure Enablement - GP Master AXI Interface - M AXI GP0 interface установлена галочка. Именно через этот AXI-интерфейс мы будем управлять нашим светодиодом. Остальные настройки в этом блоке оставляем по умолчанию.
Переходим в меню Peripheral I/O Pins. Первым делом выбираем питание Bank 1 в LVCMOS 1.8V т.к. RGMII интерфейс (для Ethernet) не поддерживает напряжение 3.3В, а только 1.8 и 2.5В.

Настраиваем нашу периферию в соответствии с тем, что есть на плате:
Открываем блок Ethernet 0, ставим галочку MDIO и размечаем на позиции 16:27 Enet0 и убеждаемся, что MDIO размечен на позициях 52:53.
Открываем блок SD 0, ставим галочку у Card Detect. Размечаем на позицию 40:45 и Card Detect на 47.
Настраиваем UART. Выбираем блок UART 1 и размечаем на позицию 12:13.
Ставим галочки на GPIO MIO и GPIO EMIO.
Переходим на вкладку MIO Configuration. И сверяем настройки.
Для Ethernet:

Для SDIO:

Для UART:

Для GPIO:
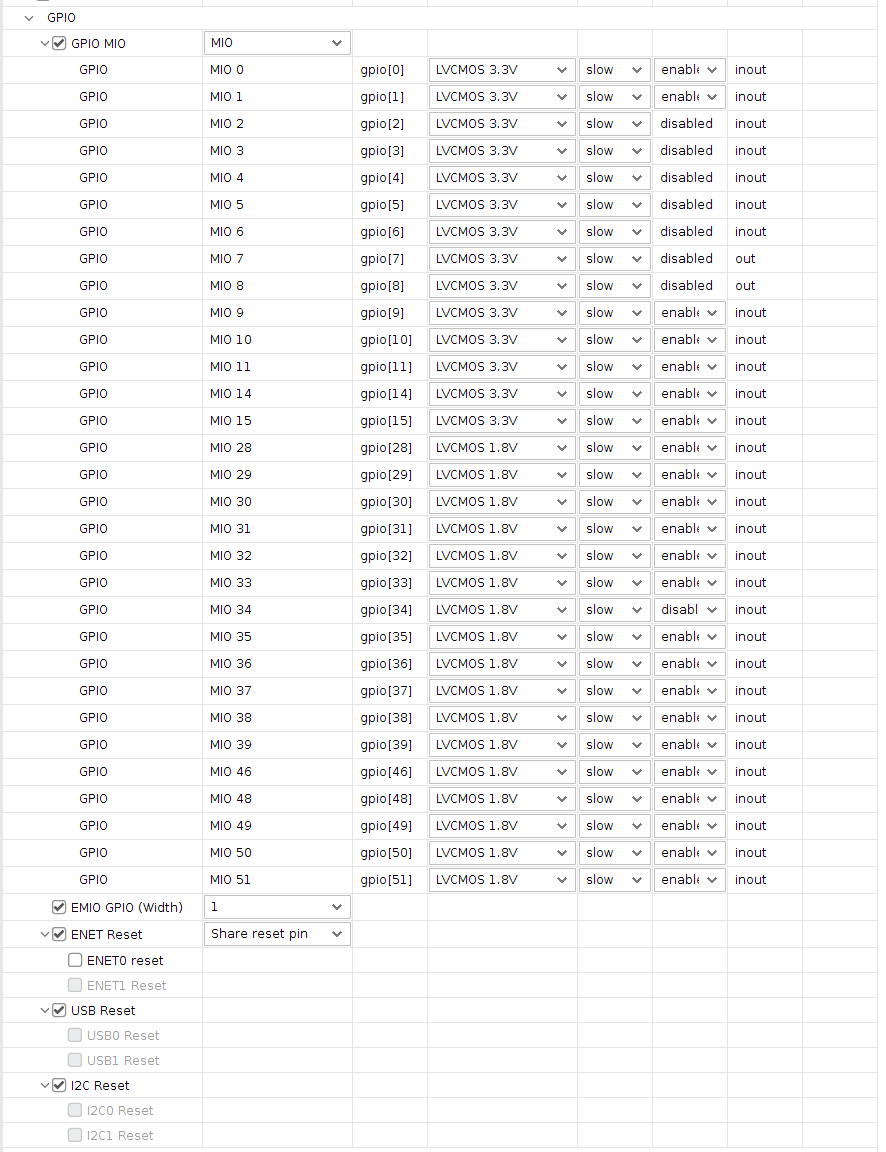
Устанавливаем EMIO GPIO (Width) в значение 1.
Далее переходим в блок настройки тактирования Clock Configuration:
Все настройки, в моем случае, выглядят таким образом:

Можно выбрать подходящие вам частоты. Я оставлю всё как есть. За исключением FCLK_CLK0, так я поставлю 100МГц. Данный Clock отвечает за частоту тактирования программируемой логики со стороны процессорной системы.
В следующем блоке DDR Configuration настроим ОЗУ. В моем случае используется следующая конфигурация:

Остальные блоки с настройками оставляем как есть и нажимаем Ok.
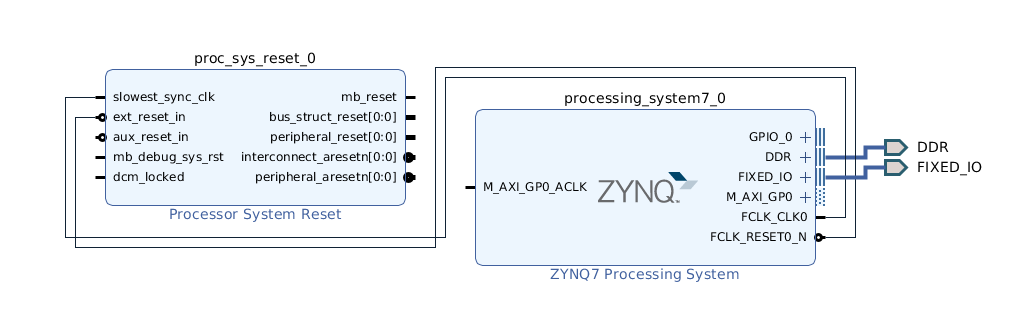
Следом за Zynq PS, добавляем в наш Block Design еще один элемент - Processor System Reset. Подключаем Clock и сигналы сброса:
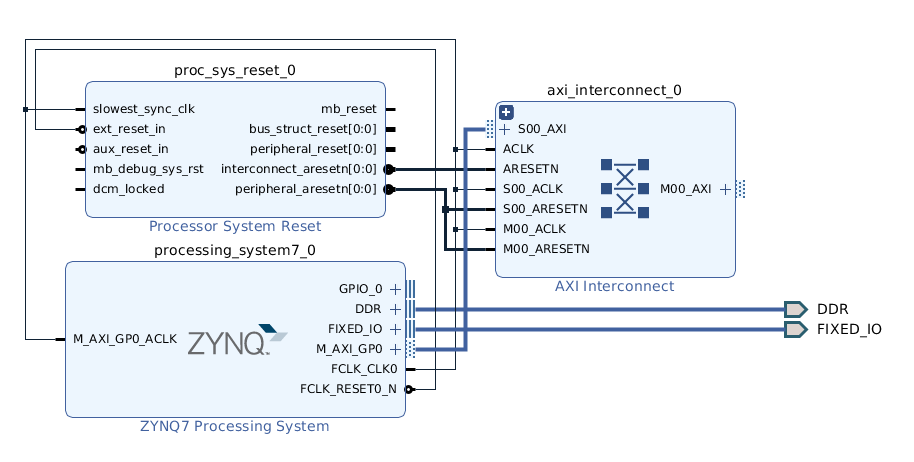
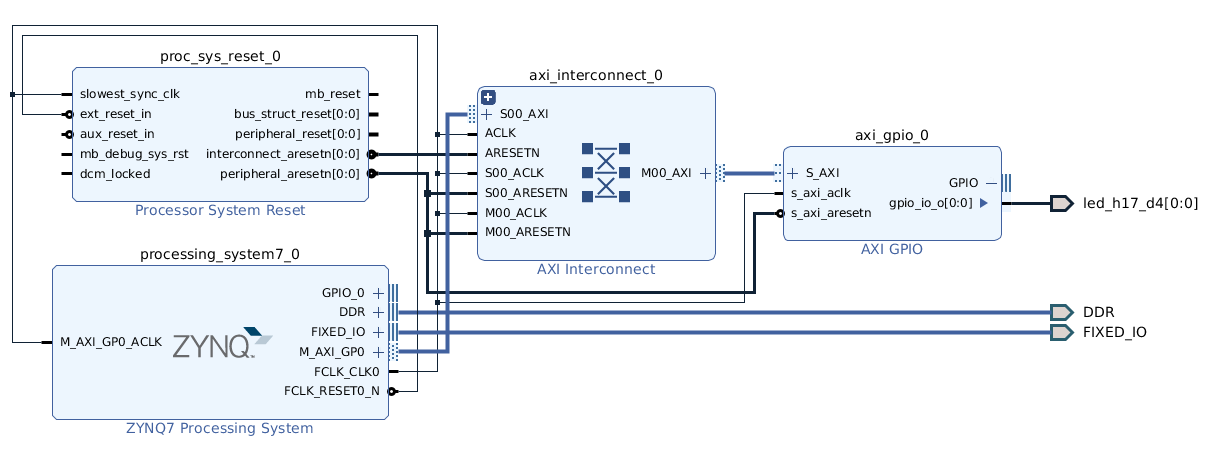
Добавляем блок AXI Interconnect, чтобы реализовать интерфейс взаимодействия PS и PL подсистем. Соединяем все сигналы Reset и Clock как указанно на схеме:
После этого мы подсоединяем к блоку AXI Interconnect блок AXI GPIO, к которому подключим GPIO-ножку, к которой подключен светодиод D4.
Настраиваем блок GPIO. Двойным кликом по AXI GPIO открываем меню настройки данного GPIO-контроллера. В нем ставим галочку All Outputs и GPIO Width в 1 т.к. будет использоваться только одна ножка для подключения светодиода:

После выполняем указания мастера автоматизации. Именуем ножку GPIO как led_h17_d4 и получаем следующую схему:
Нажимаем Ok и правую клавишу мыши по Design Sources - zynq_wrapper.bd и выбираем пункт Create HDL Wrapper. В всплывшем меню нажимаем Ok.

После этого запускаем синтез и дожидаемся его окончания. После окончания выбираем в меню Open Synthesized Design:
Откроется общая карта распиновки, и нас в этом меню интересует в первую очередь вкладка I/O Ports. Раскрываем меню и выбираем пин H17, к которому подключен светодиод D4.

После этого будет предложено сгенерировать Constraints-файл. Дадим ему название и сохраним:

После этого необходимо заново запустить синтезирование нашей схемы для того, чтобы внести все изменения. После окончания синтеза запускаем имплементацию и генерацию битстрима. Дожидаемся окончания.
После экспортируем настройки Hardware и не забываем включить bitstream-файл:
Теперь давайте проверим с помощью простейшего baremetal-приложения, правильно ли мы всё сделали и всё ли работает: помигаем светодиодом подключенным к PL-части Zynq используя приложение PS.
Запускаем SDK через меню File - Launch SDK и добавляем новое приложение в проект. Нажимаем File - New - Application Project.
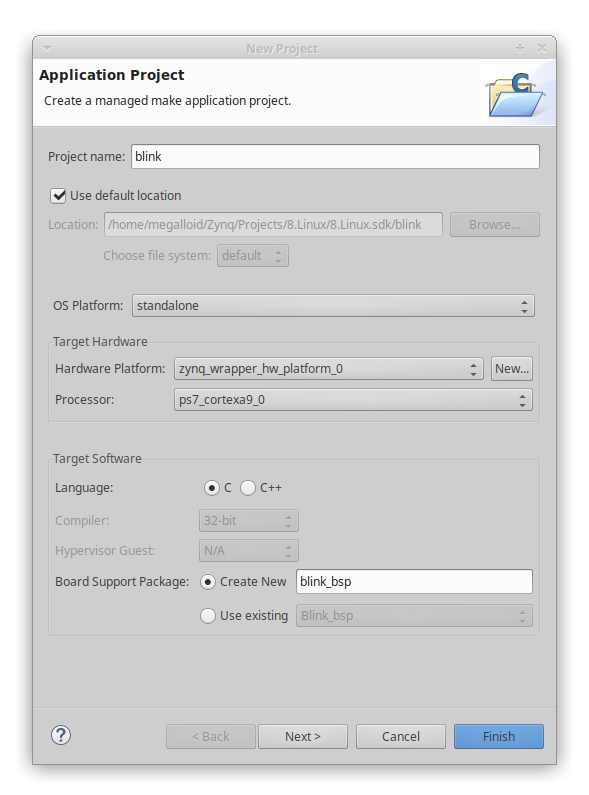
Пишем название проекта и нажимаем клавишу Next. Добавляем шаблонный проект Empty Application.
В структуре проекта открываем папку blink - src и добавляем файл New - Source File, даём ему имя main.c. Пишем достаточно простой код для моргалки:
/* * main.c * * Created on: Jun 29, 2021 * Author: megalloid */ #include "xparameters.h" #include "xil_printf.h" #include "xgpio.h" #include "xil_types.h" #include "sleep.h" // Get device IDs from xparameters.h #define LED_ID XPAR_GPIO_0_DEVICE_ID #define LED_CHANNEL 1 #define LED_MASK 0b1 int main() { XGpio_Config *cfg_ptr; XGpio led_device; int xStatus; xil_printf("\r\nEntered function main\r\n"); // Initialize LED Device cfg_ptr = XGpio_LookupConfig(LED_ID); xStatus = XGpio_CfgInitialize(&led_device, cfg_ptr, cfg_ptr -> BaseAddress); if(XST_SUCCESS != xStatus) print("ERROR! AXI GPIO INIT FAILED \n\r"); else print("SUCCESS! AXI GPIO INIT OK \n\r"); // Set Led Tristate XGpio_SetDataDirection(&led_device, LED_CHANNEL, 0); while (1) { usleep(100000); XGpio_DiscreteWrite(&led_device, LED_CHANNEL, LED_MASK); usleep(100000); XGpio_DiscreteWrite(&led_device, LED_CHANNEL, 0); } }
Сохраняем файл нажатием клавиш Ctrl + S. После этого можно загрузить bitstream в плату и запустить пример. Переходим в меню Xilinx - Program FPGA и нажимаем Program. Дожидаемся когда загрузится bitstream-файл и кликаем правой кнопке по проекту blink и нажимаем в меню Run As - Launch on Hardware (System debugger). Дожидаемся загрузки и радуемся мигающему светодиоду. Значит всё работает =)
Открываем UART-консоль нашего девайса и смотрим, что периферия успешно инициализирована, а светодиод мигает в соответствии с установленной задержкой в бесконечном цикле.
First Stage Bootloader
Итак, BSP мы подготовили, теперь необходимо сделать заготовку для сборки финального загрузочного образа. Первым шагом необходимо создать загрузчик первого уровня.
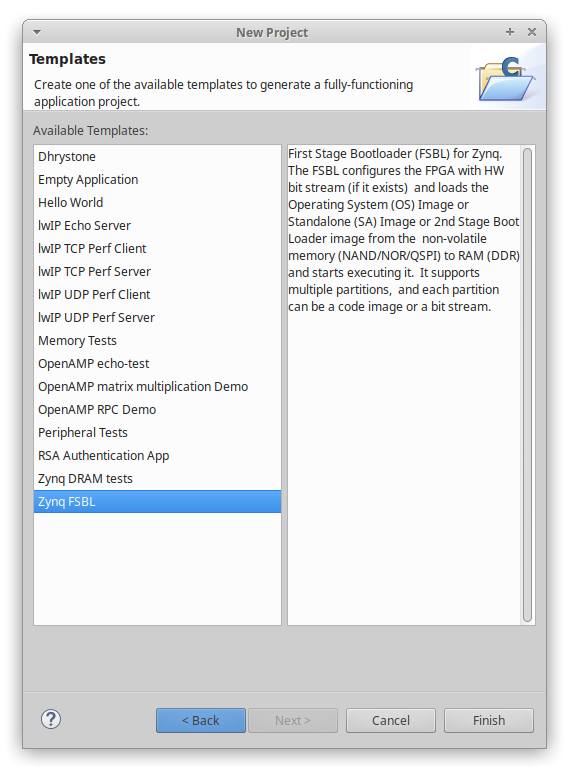
Добавляем в дерево проектов новый проект, назовём его FSBL. Нажимаем Next и выбираем заготовку Zynq FSBL. Нажимаем Finish.
После создания проекта он будет откомпилирован и будет успешно создан elf-файл который нам пригодится в последующем.
Device tree source
Первым делом нам необходимо подготовить файл описания периферии для его последующего использования во время компиляции U-Boot и ядра Linux. Такой файл описания называется Device Tree Source. Дерево устройств или просто Device Tree - это структура данных, описывающая параметры и характеристики аппаратного обеспечения используемого в устройстве.
Существует огромное множество книг описывающих подходы к разработке и описанию DTS и подробно останавливаться на разборе этого этапа я не буду.
Стоит отдельно отметить, что разработчику под Xilinx Zynq в большинстве случаев не требуется создавать файл описания самостоятельно и существует удобное средство для быстрой генерации DTS на основании BSP, который передает Vivado при переходе в SDK. Называется оно Devicetree Generator (DTG).
Им мы и воспользуемся для генерации DTS нашей платы, предварительно добавив его в Xilinx SDK.
git clone https://github.com/Xilinx/device-tree-xlnx cd device-tree-xlnx git checkout xilinx-v2019.1
Добавляем BSP Repository в SDK. Нажимаем в верхнем меню Xilinx - Repositories - New. Указываем папку, в которую клонировали репозиторий DTG и нажимаем Ok. За относительно короткое время скомпилируется генератор и можно запустить генерацию DTS-файла:

Выбираем device_tree и нажимаем Finish. Появится окно редактирования переменных окружения и драйверов. При необходимости можете добавить свои переменные окружения.

Например, когда будет понятно, какой скрипт или команду и какой тип загрузки использовать при загрузке ядра Linux - можно добавить соответствующую запись в bootargs.
В нашем случае, это нам делать не нужно и оставляем всё как есть. Все необходимые команды мы добавим после. Нажимаем Ok и видим что у нас сгенерирован целый ряд файлов:

После генерации с помощью DTG появляется большой список файлов, нам же нужно получить ровно один dts-файл. Необходимо воспользоваться следующей командой для того, чтобы скомпоновать все в один файл:
gcc -I my_dts -E -nostdinc -undef -D__DTS__ -x assembler-with-cpp -o system.dts system-top.dts
Теперь нам необходимо скомпилировать Device Tree Sources в Device Tree Blob. Для этого необходимо собрать программу Device Tree Compiler:
sudo apt install bison flex python-dev swig git clone https://git.kernel.org/pub/scm/utils/dtc/dtc.git cd dtc make export PATH=$PATH:/<path-to-dtc>/dtc
После этого можно скомпилировать Device Tree Blob из DTS и создадим его копию с новым названием:
dtc -I dts -O dtb -o system.dtb system.dts cp system.dtb zynq-qmtech.dtb
Cross compile tool и U-boot
В этом этапе можно переходить к настройке утилит кросс-компиляции для того, чтобы собрать U-Boot и ядро Linux для последующего использования на отладке.
Совет! Подробнее о генерации Device Tree для Xilinx Zynq можно почитать тут
Хотел бы в этом месте обратить ваше внимание на книгу Криса Симмондса - Встраиваемые системы на основе Linux. В которой подробно разобраны вопросы связанные с кросс-компиляцией, настройкой окружения, зависимостей. И дан подробный разбор утилит включенных в состав кросс-компилятора.
Дополнительную информацию по компиляции U-Boot для Xilinx Zynq вы можете взять по этой ссылке.
Первым делом надо установить все необходимые зависимости для выполнения корректной кросс-компиляции. В Ubuntu это можно сделать так:
sudo apt install \ git gcc-arm-linux-gnueabihf u-boot-tools build-essential -y
После этого можно склонировать git-репозиторий варианта U-boot, который любезно предоставляет компания Xilinx:
git clone https://github.com/Xilinx/u-boot-xlnx.git cd u-boot-xlnx
Добавляем переменные окружения, необходимые для компиляции:
export CROSS_COMPILE=arm-linux-gnueabihf- export ARCH=arm make distclean make xilinx_zynq_virt_defconfig export DEVICE_TREE="zynq-qmtech"
Итак. Для компиляции нам необходимо подготовить config-файл, соответствующий нашей плате. Берем скомпилированный файл из прошлого этапа и кладём его в соответствующую папку:
mv ~/Zynq/Projects/8.Linux/8.Linux.sdk/device_tree_bsp_0/zynq-qmtech.dtb \ arch/arm/dts/
Запускаем компиляцию:
make -j$(nproc)
Дожидаемся окончания компиляции и видим, в конца вывода, что появились исполняемые файлы U-Boot:
.... MKIMAGE spl/boot.bin MKIMAGE u-boot.img COPY u-boot.dtb MKIMAGE u-boot-dtb.img LDS u-boot-elf.lds LD u-boot.elf CFGCHK u-boot.cfg
Попробуем собрать загрузочный образ и проверить всё ли готово к загрузке ядра Linux. Для сборки первоначального образа нам нужно:
First stage bootloader. В моем случае данный файл находится в папке /home/megalloid/Zynq/Projects/8.Linux/8.Linux.sdk/FSBL/Debug/FSBL.elf
Bitstream-файл для программируемой логики. Находится в /home/megalloid/Zynq/Projects/8.Linux/8.Linux.sdk/zynq_wrapper_hw_platform_0/zynq_wrapper.bit
Бинарный файл U-Boot. Данный файл лежит в папке с U-Boot: /home/megalloid/Zynq/Projects/u-boot-xlnx/u-boot.elf
Переходим в SDK и в верхнем меню выполняем команду Xilinx - Create Boot Image. Выбираем куда сохранить сгенерируемый bif-файл. Я его сохраню в корень проекта. И выберем место сохранения финального загрузочного образа. Расположим его там же в корне.
Добавляю поочередно указанные выше файлы. Получается следующее:

Нажимаю кнопку Create Image и генерируется загрузочный образ, который включает в себя FSBL, Bitstream-файл и U-Boot.
Загружаем BOOT.bin на предварительно отформатированную SD-карту и открываем консоль UART:

Видим, что U-Boot загрузился, но ругается на отсутствие возможности продолжить загрузку. Теперь необходимо скомпилировать ядро Linux и настроить загрузку в U-Boot.
Linux kernel
Первым шагом клонируем исходный официального образа Linux из репозитория Xilinx.
git clone https://github.com/Xilinx/linux-xlnx cd linux-xlnx make clean make ARCH=arm xilinx_zynq_defconfig
Также можно накрутить свои опции в меню конфигурации выполнив следующую команду:
make ARCH=arm menuconfig
Далее запускаем компиляцию ядра командой:
make ARCH=arm UIMAGE_LOADADDR=0x8000 uImage -j8
После окончания компиляции мы получаем образ arch/arm/boot/uImage.
Совет! Подробнее можно почитать на официальном wiki-ресурсе Xilinx.
RootFS image
Следующим шагом нам необходимо подготовить образ файловой системы для последующей загрузки Linux. В этом случае у нас есть возможность поступить двумя путями:
Использовать pre-built образы с Xilinx Wiki;
Подготовить свой собственный;
Мы пойдем первым путем и будем использовать тот, что представлен по ссылке в первом пункте. Создаем в корне папки с проектами новую папку и скачиваем туда файл с сайта:
mkdir rootfs cd rootfs mv ~/Downloads/arm_ramdisk.image.gz . mkdir tmp_mnt/
Распакуем его, посмотрим содержимое и запакуем обратно:
gunzip arm_ramdisk.image.gz chmod u+rwx arm_ramdisk.image sudo mount -o loop arm_ramdisk.image tmp_mnt/ cd tmp_mnt/ ls -lsa megalloid@megalloid-lenovo:~/Zynq/Projects/rootfs/tmp_mnt$ ls -lsa total 847 1 drwxr-xr-x 18 root root 1024 Nov 28 2012 . 4 drwxrwxr-x 3 megalloid megalloid 4096 Jun 29 17:45 .. 2 drwxr-xr-x 2 root root 2048 Nov 28 2012 bin 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 dev 1 drwxr-xr-x 5 root root 1024 Nov 28 2012 etc 1 drwxrwxrwx 3 root root 1024 Nov 28 2012 home 1 drwxr-xr-x 3 root root 1024 Nov 28 2012 lib 1 drwxr-xr-x 12 root root 1024 Nov 28 2012 licenses 0 lrwxrwxrwx 1 root root 11 Nov 28 2012 linuxrc -> bin/busybox 824 drwx------ 2 root root 838656 Nov 28 2012 lost+found 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 mnt 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 opt 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 proc 1 -rw-r--r-- 1 root root 256 Nov 28 2012 README 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 root 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 sbin 1 drwxr-xr-x 2 root root 1024 Nov 28 2012 sys 1 drwxrwxrwt 2 root root 1024 Nov 28 2012 tmp 1 -rwxr-xr-x 1 root root 481 Nov 28 2012 update_qspi.sh 1 drwxr-xr-x 6 root root 1024 Nov 28 2012 usr 1 drwxr-xr-x 5 root root 1024 Nov 28 2012 var
После того, как посмотрели, что лежит в составе образа, можем положить то, что нам может понадобиться. Например, какие-то свои приложения. Также для заполнения файловой системы могут использоваться инструменты наподобие Buildroot или Yocto.
Запакуем обратно:
cd .. sudo umount tmp_mnt/ gzip arm_ramdisk.image
Для того, чтобы U-Boot корректно обработал образ ramdisk.image,его необходимо корректно обернуть заголовком U-Boot. Опция -A используется с аргументом "arm" для устройств Zynq7000 и "arm64" для устройств ZynqUS+.
megalloid@megalloid-lenovo:~/Zynq/Projects/rootfs$ mkimage \ -A arm -T ramdisk -C gzip -d arm_ramdisk.image.gz uramdisk.image.gz Image Name: Created: Tue Jun 29 18:00:27 2021 Image Type: ARM Linux RAMDisk Image (gzip compressed) Data Size: 5310011 Bytes = 5185.56 KiB = 5.06 MiB Load Address: 00000000 Entry Point: 00000000
Теперь, когда у нас есть все необходимые компоненты для загрузки Linux - скопируем их на microSD и попробуем загрузиться. Не забываем переименовать файл Device Tree в удобное имя devicetree.dtb.
Вот что должно быть на SD-карте в итоге:
megalloid@megalloid-lenovo:/media/megalloid/2B80-859A$ ll total 14556 drwxr-xr-x 2 megalloid megalloid 4096 Jan 1 1970 ./ drwxr-x---+ 3 root root 4096 Jun 29 18:02 ../ -rw-r--r-- 1 megalloid megalloid 5088608 Jun 29 15:34 BOOT.bin -rw-r--r-- 1 megalloid megalloid 9640 Jun 29 15:10 devicetree.dtb -rw-r--r-- 1 megalloid megalloid 4478152 Jun 29 16:59 uImage -rw-r--r-- 1 megalloid megalloid 5310075 Jun 29 18:00 uramdisk.image.gz
Вставляем microSD в отладочную плату и заходим в меню U-Boot, чтобы ввести необходимые указания для загрузки образа.
Когда дождемся приглашение на ввод от U-Boot нужно записать команду загрузки:
setenv mmc_boot 'fatload mmc 0 0x3000000 uImage; fatload mmc 0 0x2A00000 devicetree.dtb; fatload mmc 0 0x2000000 uramdisk.image.gz; bootm 0x3000000 0x2000000 0x2A00000;' saveenv reset
После перезагрузки получаем следующий лог загрузки и мы можем считать, что с основной задачей мы справились. Linux стартанул.
Лог загрузки Linux
U-Boot 2021.01-00031-g4e3336dcb5 (Jun 29 2021 - 15:11:30 +0300) CPU: Zynq 7z020 Silicon: v3.1 DRAM: ECC disabled 512 MiB Flash: 0 Bytes NAND: 0 MiB MMC: mmc@e0100000: 0 Loading Environment from FAT... OK In: serial@e0001000 Out: serial@e0001000 Err: serial@e0001000 Net: ZYNQ GEM: e000b000, mdio bus e000b000, phyaddr -1, interface rgmii-id Warning: ethernet@e000b000 (eth0) using random MAC address - 2a:9d:8e:81:de:d2 eth0: ethernet@e000b000 Hit any key to stop autoboot: 0 4478152 bytes read in 747 ms (5.7 MiB/s) 9640 bytes read in 19 ms (495.1 KiB/s) 5310075 bytes read in 886 ms (5.7 MiB/s) ## Booting kernel from Legacy Image at 03000000 ... Image Name: Linux-5.10.0-xilinx-00012-g163a7 Image Type: ARM Linux Kernel Image (uncompressed) Data Size: 4478088 Bytes = 4.3 MiB Load Address: 00008000 Entry Point: 00008000 Verifying Checksum ... OK ## Loading init Ramdisk from Legacy Image at 02000000 ... Image Name: Image Type: ARM Linux RAMDisk Image (gzip compressed) Data Size: 5310011 Bytes = 5.1 MiB Load Address: 00000000 Entry Point: 00000000 Verifying Checksum ... OK ## Flattened Device Tree blob at 02a00000 Booting using the fdt blob at 0x2a00000 Loading Kernel Image Loading Ramdisk to 1e5d9000, end 1eae963b ... OK Loading Device Tree to 1e5d3000, end 1e5d85a7 ... OK Starting kernel ... Booting Linux on physical CPU 0x0 Linux version 5.10.0-xilinx-00012-g163a7d26208a (megalloid@megalloid-lenovo) (arm-linux-gnueabihf-gcc (Ubuntu 9.3.0-17ubuntu1~20.04) 9.3.0, GNU ld (GNU Binutils for Ubuntu) 2.34) #1 SMP PREEMPT Tue Jun 29 16:50:29 MSK 2021 CPU: ARMv7 Processor [413fc090] revision 0 (ARMv7), cr=18c5387d CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache OF: fdt: Machine model: xlnx,zynq-7000 earlycon: cdns0 at MMIO 0xe0001000 (options '115200n8') printk: bootconsole [cdns0] enabled Memory policy: Data cache writealloc cma: Reserved 16 MiB at 0x1f000000 Zone ranges: Normal [mem 0x0000000000000000-0x000000001fffffff] HighMem empty Movable zone start for each node Early memory node ranges node 0: [mem 0x0000000000000000-0x000000001fffffff] Initmem setup node 0 [mem 0x0000000000000000-0x000000001fffffff] percpu: Embedded 15 pages/cpu s32204 r8192 d21044 u61440 Built 1 zonelists, mobility grouping on. Total pages: 130048 Kernel command line: earlycon Dentry cache hash table entries: 65536 (order: 6, 262144 bytes, linear) Inode-cache hash table entries: 32768 (order: 5, 131072 bytes, linear) mem auto-init: stack:off, heap alloc:off, heap free:off Memory: 486848K/524288K available (6144K kernel code, 248K rwdata, 1856K rodata, 1024K init, 161K bss, 21056K reserved, 16384K cma-reserved, 0K highmem) rcu: Preemptible hierarchical RCU implementation. rcu: RCU event tracing is enabled. rcu: RCU restricting CPUs from NR_CPUS=4 to nr_cpu_ids=2. Trampoline variant of Tasks RCU enabled. rcu: RCU calculated value of scheduler-enlistment delay is 10 jiffies. rcu: Adjusting geometry for rcu_fanout_leaf=16, nr_cpu_ids=2 NR_IRQS: 16, nr_irqs: 16, preallocated irqs: 16 efuse mapped to (ptrval) slcr mapped to (ptrval) GIC physical location is 0xf8f01000 L2C: platform modifies aux control register: 0x72360000 -> 0x72760000 L2C: DT/platform modifies aux control register: 0x72360000 -> 0x72760000 L2C-310 erratum 769419 enabled L2C-310 enabling early BRESP for Cortex-A9 L2C-310 full line of zeros enabled for Cortex-A9 L2C-310 ID prefetch enabled, offset 1 lines L2C-310 dynamic clock gating enabled, standby mode enabled L2C-310 cache controller enabled, 8 ways, 512 kB L2C-310: CACHE_ID 0x410000c8, AUX_CTRL 0x76760001 random: get_random_bytes called from start_kernel+0x2c4/0x498 with crng_init=0 zynq_clock_init: clkc starts at (ptrval) Zynq clock init sched_clock: 64 bits at 333MHz, resolution 3ns, wraps every 4398046511103ns clocksource: arm_global_timer: mask: 0xffffffffffffffff max_cycles: 0x4ce07af025, max_idle_ns: 440795209040 ns Switching to timer-based delay loop, resolution 3ns Console: colour dummy device 80x30 printk: console [tty0] enabled printk: bootconsole [cdns0] disabled Booting Linux on physical CPU 0x0 Linux version 5.10.0-xilinx-00012-g163a7d26208a (megalloid@megalloid-lenovo) (arm-linux-gnueabihf-gcc (Ubuntu 9.3.0-17ubuntu1~20.04) 9.3.0, GNU ld (GNU Binutils for Ubuntu) 2.34) #1 SMP PREEMPT Tue Jun 29 16:50:29 MSK 2021 CPU: ARMv7 Processor [413fc090] revision 0 (ARMv7), cr=18c5387d CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache OF: fdt: Machine model: xlnx,zynq-7000 earlycon: cdns0 at MMIO 0xe0001000 (options '115200n8') printk: bootconsole [cdns0] enabled Memory policy: Data cache writealloc cma: Reserved 16 MiB at 0x1f000000 Zone ranges: Normal [mem 0x0000000000000000-0x000000001fffffff] HighMem empty Movable zone start for each node Early memory node ranges node 0: [mem 0x0000000000000000-0x000000001fffffff] Initmem setup node 0 [mem 0x0000000000000000-0x000000001fffffff] percpu: Embedded 15 pages/cpu s32204 r8192 d21044 u61440 Built 1 zonelists, mobility grouping on. Total pages: 130048 Kernel command line: earlycon Dentry cache hash table entries: 65536 (order: 6, 262144 bytes, linear) Inode-cache hash table entries: 32768 (order: 5, 131072 bytes, linear) mem auto-init: stack:off, heap alloc:off, heap free:off Memory: 486848K/524288K available (6144K kernel code, 248K rwdata, 1856K rodata, 1024K init, 161K bss, 21056K reserved, 16384K cma-reserved, 0K highmem) rcu: Preemptible hierarchical RCU implementation. rcu: RCU event tracing is enabled. rcu: RCU restricting CPUs from NR_CPUS=4 to nr_cpu_ids=2. Trampoline variant of Tasks RCU enabled. rcu: RCU calculated value of scheduler-enlistment delay is 10 jiffies. rcu: Adjusting geometry for rcu_fanout_leaf=16, nr_cpu_ids=2 NR_IRQS: 16, nr_irqs: 16, preallocated irqs: 16 efuse mapped to (ptrval) slcr mapped to (ptrval) GIC physical location is 0xf8f01000 L2C: platform modifies aux control register: 0x72360000 -> 0x72760000 L2C: DT/platform modifies aux control register: 0x72360000 -> 0x72760000 L2C-310 erratum 769419 enabled L2C-310 enabling early BRESP for Cortex-A9 L2C-310 full line of zeros enabled for Cortex-A9 L2C-310 ID prefetch enabled, offset 1 lines L2C-310 dynamic clock gating enabled, standby mode enabled L2C-310 cache controller enabled, 8 ways, 512 kB L2C-310: CACHE_ID 0x410000c8, AUX_CTRL 0x76760001 random: get_random_bytes called from start_kernel+0x2c4/0x498 with crng_init=0 zynq_clock_init: clkc starts at (ptrval) Zynq clock init sched_clock: 64 bits at 333MHz, resolution 3ns, wraps every 4398046511103ns clocksource: arm_global_timer: mask: 0xffffffffffffffff max_cycles: 0x4ce07af025, max_idle_ns: 440795209040 ns Switching to timer-based delay loop, resolution 3ns Console: colour dummy device 80x30 printk: console [tty0] enabled printk: bootconsole [cdns0] disabled Calibrating delay loop (skipped), value calculated using timer frequency.. 666.66 BogoMIPS (lpj=3333333) pid_max: default: 32768 minimum: 301 Mount-cache hash table entries: 1024 (order: 0, 4096 bytes, linear) Mountpoint-cache hash table entries: 1024 (order: 0, 4096 bytes, linear) CPU: Testing write buffer coherency: ok CPU0: Spectre v2: using BPIALL workaround CPU0: thread -1, cpu 0, socket 0, mpidr 80000000 Setting up static identity map for 0x100000 - 0x100060 rcu: Hierarchical SRCU implementation. smp: Bringing up secondary CPUs ... CPU1: thread -1, cpu 1, socket 0, mpidr 80000001 CPU1: Spectre v2: using BPIALL workaround smp: Brought up 1 node, 2 CPUs SMP: Total of 2 processors activated (1333.33 BogoMIPS). CPU: All CPU(s) started in SVC mode. devtmpfs: initialized VFP support v0.3: implementor 41 architecture 3 part 30 variant 9 rev 4 clocksource: jiffies: mask: 0xffffffff max_cycles: 0xffffffff, max_idle_ns: 19112604462750000 ns futex hash table entries: 512 (order: 3, 32768 bytes, linear) pinctrl core: initialized pinctrl subsystem NET: Registered protocol family 16 DMA: preallocated 256 KiB pool for atomic coherent allocations thermal_sys: Registered thermal governor 'step_wise' cpuidle: using governor menu hw-breakpoint: found 5 (+1 reserved) breakpoint and 1 watchpoint registers. hw-breakpoint: maximum watchpoint size is 4 bytes. zynq-ocm f800c000.ocmc: ZYNQ OCM pool: 256 KiB @ 0x(ptrval) e0001000.serial: ttyPS0 at MMIO 0xe0001000 (irq = 32, base_baud = 6249999) is a xuartps printk: console [ttyPS0] enabled vgaarb: loaded SCSI subsystem initialized usbcore: registered new interface driver usbfs usbcore: registered new interface driver hub usbcore: registered new device driver usb mc: Linux media interface: v0.10 videodev: Linux video capture interface: v2.00 pps_core: LinuxPPS API ver. 1 registered pps_core: Software ver. 5.3.6 - Copyright 2005-2007 Rodolfo Giometti <giometti@linux.it> PTP clock support registered EDAC MC: Ver: 3.0.0 FPGA manager framework Advanced Linux Sound Architecture Driver Initialized. clocksource: Switched to clocksource arm_global_timer NET: Registered protocol family 2 tcp_listen_portaddr_hash hash table entries: 512 (order: 0, 6144 bytes, linear) TCP established hash table entries: 4096 (order: 2, 16384 bytes, linear) TCP bind hash table entries: 4096 (order: 3, 32768 bytes, linear) TCP: Hash tables configured (established 4096 bind 4096) UDP hash table entries: 256 (order: 1, 8192 bytes, linear) UDP-Lite hash table entries: 256 (order: 1, 8192 bytes, linear) NET: Registered protocol family 1 RPC: Registered named UNIX socket transport module. RPC: Registered udp transport module. RPC: Registered tcp transport module. RPC: Registered tcp NFSv4.1 backchannel transport module. PCI: CLS 0 bytes, default 64 Trying to unpack rootfs image as initramfs... rootfs image is not initramfs (no cpio magic); looks like an initrd Freeing initrd memory: 5188K hw perfevents: no interrupt-affinity property for /pmu@f8891000, guessing. hw perfevents: enabled with armv7_cortex_a9 PMU driver, 7 counters available workingset: timestamp_bits=30 max_order=17 bucket_order=0 jffs2: version 2.2. (NAND) (SUMMARY) 2001-2006 Red Hat, Inc. io scheduler mq-deadline registered io scheduler kyber registered zynq-pinctrl 700.pinctrl: zynq pinctrl initialized dma-pl330 f8003000.dmac: Loaded driver for PL330 DMAC-241330 dma-pl330 f8003000.dmac: DBUFF-128x8bytes Num_Chans-8 Num_Peri-4 Num_Events-16 brd: module loaded loop: module loaded libphy: Fixed MDIO Bus: probed CAN device driver interface libphy: MACB_mii_bus: probed macb e000b000.ethernet eth0: Cadence GEM rev 0x00020118 at 0xe000b000 irq 33 (2a:9d:8e:81:de:d2) e1000e: Intel(R) PRO/1000 Network Driver e1000e: Copyright(c) 1999 - 2015 Intel Corporation. ehci_hcd: USB 2.0 'Enhanced' Host Controller (EHCI) Driver ehci-pci: EHCI PCI platform driver usbcore: registered new interface driver usb-storage i2c /dev entries driver cdns-wdt f8005000.watchdog: Xilinx Watchdog Timer with timeout 10s EDAC MC: ECC not enabled Xilinx Zynq CpuIdle Driver started sdhci: Secure Digital Host Controller Interface driver sdhci: Copyright(c) Pierre Ossman sdhci-pltfm: SDHCI platform and OF driver helper ledtrig-cpu: registered to indicate activity on CPUs clocksource: ttc_clocksource: mask: 0xffff max_cycles: 0xffff, max_idle_ns: 537538477 ns timer #0 at (ptrval), irq=46 usbcore: registered new interface driver usbhid usbhid: USB HID core driver fpga_manager fpga0: Xilinx Zynq FPGA Manager registered mmc0: SDHCI controller on e0100000.mmc [e0100000.mmc] using ADMA NET: Registered protocol family 10 Segment Routing with IPv6 sit: IPv6, IPv4 and MPLS over IPv4 tunneling driver NET: Registered protocol family 17 can: controller area network core NET: Registered protocol family 29 can: raw protocol can: broadcast manager protocol can: netlink gateway - max_hops=1 Registering SWP/SWPB emulation handler of-fpga-region fpga-full: FPGA Region probed of_cfs_init of_cfs_init: OK ALSA device list: No soundcards found. RAMDISK: gzip image found at block 0 mmc0: new high speed SD card at address b368 mmcblk0: mmc0:b368 00000 1.83 GiB mmcblk0: p1 using deprecated initrd support, will be removed in 2021. EXT4-fs (ram0): mounting ext2 file system using the ext4 subsystem EXT4-fs (ram0): mounted filesystem without journal. Opts: (null) VFS: Mounted root (ext2 filesystem) on device 1:0. Starting rcS... ++ Mounting filesystem mount: mounting /dev/mmcblk0p1 on /mnt failed: No such file or directory mount: mounting /dev/mmcblk0 on /mnt failed: No such file or directory ++ Setting up mdev /etc/init.d/rcS: line 12: can't create /proc/sys/kernel/hotplug: nonexistent directory ++ Starting telnet daemon ++ Starting http daemon ++ Starting ftp daemon ++ Starting ssh daemon random: sshd: uninitialized urandom read (32 bytes read) rcS Complete zynq>
Теперь попробуем поморгать светодиодом через sysfs из userspace загруженного Linux!
zynq> ls /sys/class/gpio/ export gpio1023 gpio905 gpiochip1023 gpiochip905 unexport zynq> echo 1023 > /sys/class/gpio/export zynq> echo out > /sys/class/gpio/gpio1023/direction zynq> echo 0 > /sys/class/gpio/gpio1023/value zynq> echo 1 > /sys/class/gpio/gpio1023/value
С помощью записи 0 или 1 в значение GPIO-ножки - мы переключаем его состояние. Задачу со светодиодом можно считать выполненно!
Проверим работает ли остальная периферия. Посмотрим объем оперативной памяти, должно быть 512 Мбайт:
zynq> free total used free shared buffers Mem: 508420 30036 478384 0 432 -/+ buffers: 29604 478816 Swap: 0
Примонтируем microSD-карту и посмотрим ее содержимое:
zynq> mkdir /mnt/mmc zynq> mount /dev/mmcblk0p1 /mnt/mmc zynq> ls /mnt/mmc/ BOOT.bin uImage uramdisk.image.gz devicetree.dtb uboot.env zynq>
И последним шагом проверим, работает ли Ethernet. Подключим плату кабелем к роутеру и попробуем получить доступ к плате по SSH. При выполнении команды ifconfig мы наблюдаем пустой результат.
zynq> ifconfig
Выведем все доступные сетевые интерфейсы. Видим сетевой интерфейс есть, просто он не настроен.
zynq> ifconfig -a eth0 Link encap:Ethernet HWaddr 2A:9D:8E:81:DE:D2 BROADCAST MULTICAST MTU:1500 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B) Interrupt:33 Base address:0xb000 lo Link encap:Local Loopback LOOPBACK MTU:65536 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B) sit0 Link encap:IPv6-in-IPv4 NOARP MTU:1480 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Что ж, настроим его руками.
zynq> ifconfig eth0 192.168.2.123 netmask 255.255.255.0 up macb e000b000.ethernet eth0: PHY [e000b000.ethernet-ffffffff:00] driver [RTL8211E Gigabit Ethernet] (irq=POLL) macb e000b000.ethernet eth0: configuring for phy/rgmii-id link mode ifmacb e000b000.ethernet eth0: Link is Up - 1Gbps/Full - flow control off IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready
Наблюдаем сообщения о том, что Ethernet Link поднялся. Проверим это снова через программу ifconfig:
zynq> ifconfig eth0 Link encap:Ethernet HWaddr 2A:9D:8E:81:DE:D2 inet addr:192.168.2.123 Bcast:192.168.2.255 Mask:255.255.255.0 inet6 addr: fe80::289d:8eff:fe81:ded2/64 Scope:Link UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:6 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:540 (540.0 B) Interrupt:33 Base address:0xb000
Раз интерфейс в статусе UP - значит интерфейс работает и можно пинговать роутер:
zynq> ping 192.168.2.1 PING 192.168.2.1 (192.168.2.1): 56 data bytes 64 bytes from 192.168.2.1: seq=0 ttl=64 time=0.649 ms 64 bytes from 192.168.2.1: seq=1 ttl=64 time=0.568 ms 64 bytes from 192.168.2.1: seq=2 ttl=64 time=0.290 ms 64 bytes from 192.168.2.1: seq=3 ttl=64 time=0.293 ms ^C --- 192.168.2.1 ping statistics --- 4 packets transmitted, 4 packets received, 0% packet loss round-trip min/avg/max = 0.290/0.450/0.649 ms
Ответ от роутера есть. Попробуем подключиться с компьютера к плате через SSH:
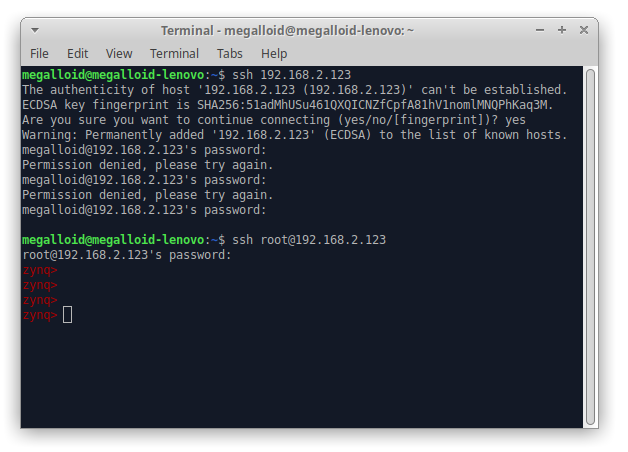
Со стороны платы видим сообщения от sshd. Сеть работает.
zynq> random: sshd: uninitialized urandom read (32 bytes read) random: sshd: uninitialized urandom read (32 bytes read)
Подведем итог
На этом все поставленные перед нами задачи можно считать выполненными. Подведем небольшой итог к этому, достаточно большому, уроку.
В этом уроке мы:
сконфигурировали PS-часть и настроили подключаемую к ней периферию;
провели базовую настройку AXI Interconnect, GPIO-модуля и подключили к нему светодиод D4, который подключен к ножкам ПЛИС;
проверили работоспособность этой конфигурации с помощью простого baremetal-приложения;
собрали загрузчик первого уровня (FSBL);
скомпилировали Device Tree Source под нашу плату;
скомпилировали U-Boot для загрузки ядра Linux;
скомпилировали Linux Kernel версии 5.10;
настроили загрузку Linux Kernel ри помощи U-Boot с microSD-карты;
проверили работоспособность всей необходимой нам периферии;
проверили, что мы можем управлять светодиодом через sysfs;
До встречи в следующих статьях! =)

