Вы знаете, что каждый третий пылесос, который покупают в Испании – робот-пылесос? Спрос в России на эти устройства также растет из месяца в месяц. Цены варьируются в среднем от 10 000 до 30 000 рублей. Что из себя представляет этот популярный гаджет и как он устроен? На эти вопросы мы ответим в данной статье. Положим на операционный стол робот-пылесос среднего ценового диапазона Yujin Robot iClebo Arte и начнем изучать его внутренности. Звучит жутковато, но уверяю вас, статья подойдет даже для категории читателей 0+.

 На верхней части корпуса расположена камера, она помогает строить карту помещения, и дает знать роботу, где он уже был, а где еще не убирался. Также с ее помощью робот находит кратчайший путь от места окончания уборки до места старта (базы для подзарядки). На фото можно заметить сенсорный ЖК-экран с управляющими кнопками и иконками, бампер с набором датчиков, пылесборник. На бампере расположены ИК-датчики расстояния, с их помощью робот ”видит” препятствия и старается их не касаться. Датчики расположены не по всей поверхности бампера, поэтому наезжая на препятствие под углом, робот касается его, и тогда срабатываю механические датчики столкновения. В этом случае пылесос меняет свое направление по заданному алгоритму движения. В iClebo установлен дополнительный четвертый датчик на самом верху бампера. С его помощью робот определяет возможность проехать под мебелью и при этом не застрять. Пылесборник вынимается нажатием кнопки на корпусе и не имеет каких-либо мешков для сбора пыли, а также никаких электромеханических частей. Пылесборник и фильтр можно промывать под водой. Всасывающий механизм расположен непосредственно внутри робота.
На верхней части корпуса расположена камера, она помогает строить карту помещения, и дает знать роботу, где он уже был, а где еще не убирался. Также с ее помощью робот находит кратчайший путь от места окончания уборки до места старта (базы для подзарядки). На фото можно заметить сенсорный ЖК-экран с управляющими кнопками и иконками, бампер с набором датчиков, пылесборник. На бампере расположены ИК-датчики расстояния, с их помощью робот ”видит” препятствия и старается их не касаться. Датчики расположены не по всей поверхности бампера, поэтому наезжая на препятствие под углом, робот касается его, и тогда срабатываю механические датчики столкновения. В этом случае пылесос меняет свое направление по заданному алгоритму движения. В iClebo установлен дополнительный четвертый датчик на самом верху бампера. С его помощью робот определяет возможность проехать под мебелью и при этом не застрять. Пылесборник вынимается нажатием кнопки на корпусе и не имеет каких-либо мешков для сбора пыли, а также никаких электромеханических частей. Пылесборник и фильтр можно промывать под водой. Всасывающий механизм расположен непосредственно внутри робота.

Переворачиваем робот-пылесос. Два ведущих боковых колеса задают движение устройству, переднее маленькое колесо вспомогательное без привода. На его оси расположен специальный магнитный датчик. Он необходим для измерения расстояния, пройденного роботом. Колесо не вращается вокруг своей горизонтальной оси, в этом нет необходимости. Робот меняет свое направление на месте за счет передачи момента одному из боковых колес, то есть на маневренность это никак не влияет.
Под небольшой пластиковой крышкой расположен Li-Ion аккумулятор емкостью 2200 mAh. У данного образца две боковые щетки, с практической точки зрения это помогает захватить большую площадь за один проезд. Для того, чтобы добраться до плинтуса достаточно одной боковой щетки, до углов полностью пока не добирается ни один робот-пылесос. Две боковые щетки направляют мусор к основной турбощетке, которая в свою очередь направляет его в пылесборник. Всасывающий модуль помогает засосать мусор с турбощетки. Резиновый скребок, расположенный на пылесборнике, подбирает крупный мусор. По такому принципу устроены все роботы-пылесосы в виду отсутствия большой силы всасывания. Результат уборки на гладких полах при такой конструкции очень хороший, на коврах – хуже, робот не может высосать пыль из ворсинок.
Рядом с пылесборником можно заметить два углубления — пазы для полотера. В этом пылесосе имеется функция протирки полов. Основание швабры крепится на дно, робот и пылесосит, и протирает. Салфетку из микрофибры можно смочить водой перед запуском. В процессе работы смачивать ее уже не получится, робот сбрасывает карту помещения и текущую программу уборки при отрывании его от пола. Салфетка помогает собрать мелкую пыль, включая муку, мелкий песок, соль. Для полноценной мойки полов она не подойдет.

Пришло время взяться за инструменты и посмотреть, как же выглядит робот-пылесос изнутри. Вынимаем пылесборник и основную турбощетку. Кладем робот-пылесос на лицевую панель и видим 5 отверстий для болтов. Шестое отверстие находится под наклейкой-пломбой с надписью QC Passed.

Далее необходимо аккуратно отсоединить концы бампера. Особых трудностей при этом возникнуть не должно, пластик достаточно упругий и прочный.

Расположив iClebo лицевой стороной к потолку, вытягиваем декоративную панель робота. Для этого нужно потянуть за край панели на себя и вверх. Вот мы и получили доступ к начинке робота-пылесоса.

Невооруженным взглядом можно разглядеть основные элементы. В роботе установлены 6 электроприводов: два для боковых щеток, один для турбощетки, один для всасывающего модуля (спрятан под пластиковых кожухом), два встроены в корпус боковых колес. Справа под ЖК-экраном робота-пылесоса находится его ”мозг” – микроконтроллер Abov MC81F4216D. Рядом с материнской платой и местом установки пылесборника находится специальный датчик. При его замыкании, iClebo “понимает”, что пылесборник подсоединен, иначе робот-пылесос не сдвинется с места и выдаст ошибку на дисплее.
Снимаем ЖК-экран. Видим камеру, ИК-приемник под ней. В центре светодиоды для экрана.

Освобождаем материнскую плату от множества контактов и видим гироскоп, который нужен для определения угла поворота робота.

И, наконец, освободим от всех контактов саму материнскую плату.

Что же представляет из себя такое устройство, как робот-пылесос. Блок-схема устройства представлена ниже:
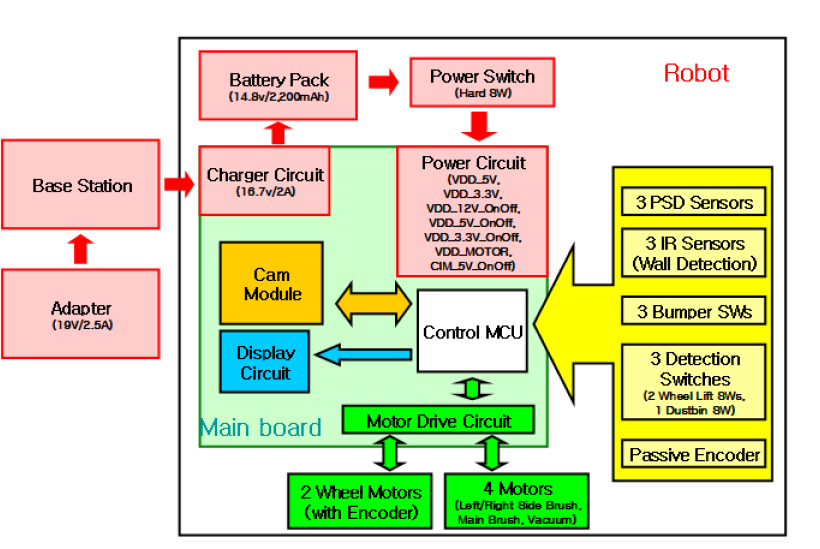
У нас имеется материнская плата (Main board) с модулем камеры, дисплеем, модулем управления электроприводами боковых колес и т. д. 19ти вольтовый адаптер, через базу для зарядки робота, заряжает литий-ионный аккумулятор, который питает все остальные элементы схемы. Для часов и таймера используется дополнительная батарейка-таблетка на материнской плате. Три датчика определения перепада высоты (3 PSD Sensors) расположены на дне корпуса устройства. Три инфракрасных датчика (3 IR Sensors) располагаются непосредственно на самом бампере. При обнаружении препятствия робот-пылесос меняет свое направление. Если ИК-датчик не сработал, но робот все же упирается в препятствие, срабатывает механический датчик бампера (3 Bumper SWs). На схеме также изображены 3 Detection Switches — два датчика определяют не оторвались ли колеса от пола, а третий датчик наличия пылесборника. Passive Encoder — датчик, расположенный около передней оси колеса для определения пройденного расстояния.
Для того чтобы понять где робот уже убирался, а где еще нет, он получается информацию со всех вышеперечисленных датчиков и сенсоров. Он замеряет пройденное расстояние и угол поворота, а с помощью камеры и датчиков препятствий «понимает» где границы убираемой площади. Будущие домашние роботы-пылесосы будут использовать камеры для полноценного построения карты помещения, определения наличия людей и животных в комнате и, скорее всего, можно будет жестом указывать роботу на дальнейшие его действия или менять режим работы.
Осталось разобраться еще с колесами. Снимаем боковое колесо. Датчик сбоку колеса помогает определять роботу его положение в пространстве, а именно: стоит ли он на полу? Если контакт разомкнут, робот прекращает работу.

Разобрав корпус колеса, видим вот такой редуктор.

Конечно, всеми этими компонентами управляет ПО, и без правильно написанного программного кода робот функционировать не будет. В данном пылесосе имеется возможность обновления ПО, но сделать это смогут только опытные пользователи, так как требуется программатор для перепрошивки «мозгов» пылесоса. Используется программатор ST-Link. Основная часть прошивки робота осуществляется при помощи этого адаптера, через коннектор J2 JTAG на плате, а через J11 USB обновляется только навигационный модуль. Причем, обе части прошивки взаимосвязаны.

Робот-пылесос — сложное техническое устройство и цены на них относительно высокие, особенно если сравнивать с бытовыми пылесосами за 3000 рублей. Вероятно, когда робот сможет обходиться парой камер для выполнения всех навигационных действий, стоимость производства заметно упадет, а следовательно и конечная стоимость устройства. А пока покупатели платят по большей части за удобство: ставим таймер, уходим на работу, робот убирает в ваше отсутствие и автоматически возвращается на базу. Ну, и конечно же, лень — двигатель прогресса. Люди обычно не хотят ничего делать, лучше за них пусть будут делать всю работу другие. Как раз бытовые роботы для этого и разрабатываются.
На верхней части корпуса расположена камера, она помогает строить карту помещения, и дает знать роботу, где он уже был, а где еще не убирался. Также с ее помощью робот находит кратчайший путь от места окончания уборки до места старта (базы для подзарядки). На фото можно заметить сенсорный ЖК-экран с управляющими кнопками и иконками, бампер с набором датчиков, пылесборник. На бампере расположены ИК-датчики расстояния, с их помощью робот ”видит” препятствия и старается их не касаться. Датчики расположены не по всей поверхности бампера, поэтому наезжая на препятствие под углом, робот касается его, и тогда срабатываю механические датчики столкновения. В этом случае пылесос меняет свое направление по заданному алгоритму движения. В iClebo установлен дополнительный четвертый датчик на самом верху бампера. С его помощью робот определяет возможность проехать под мебелью и при этом не застрять. Пылесборник вынимается нажатием кнопки на корпусе и не имеет каких-либо мешков для сбора пыли, а также никаких электромеханических частей. Пылесборник и фильтр можно промывать под водой. Всасывающий механизм расположен непосредственно внутри робота. Переворачиваем робот-пылесос. Два ведущих боковых колеса задают движение устройству, переднее маленькое колесо вспомогательное без привода. На его оси расположен специальный магнитный датчик. Он необходим для измерения расстояния, пройденного роботом. Колесо не вращается вокруг своей горизонтальной оси, в этом нет необходимости. Робот меняет свое направление на месте за счет передачи момента одному из боковых колес, то есть на маневренность это никак не влияет.
Под небольшой пластиковой крышкой расположен Li-Ion аккумулятор емкостью 2200 mAh. У данного образца две боковые щетки, с практической точки зрения это помогает захватить большую площадь за один проезд. Для того, чтобы добраться до плинтуса достаточно одной боковой щетки, до углов полностью пока не добирается ни один робот-пылесос. Две боковые щетки направляют мусор к основной турбощетке, которая в свою очередь направляет его в пылесборник. Всасывающий модуль помогает засосать мусор с турбощетки. Резиновый скребок, расположенный на пылесборнике, подбирает крупный мусор. По такому принципу устроены все роботы-пылесосы в виду отсутствия большой силы всасывания. Результат уборки на гладких полах при такой конструкции очень хороший, на коврах – хуже, робот не может высосать пыль из ворсинок.
Рядом с пылесборником можно заметить два углубления — пазы для полотера. В этом пылесосе имеется функция протирки полов. Основание швабры крепится на дно, робот и пылесосит, и протирает. Салфетку из микрофибры можно смочить водой перед запуском. В процессе работы смачивать ее уже не получится, робот сбрасывает карту помещения и текущую программу уборки при отрывании его от пола. Салфетка помогает собрать мелкую пыль, включая муку, мелкий песок, соль. Для полноценной мойки полов она не подойдет.
Пришло время взяться за инструменты и посмотреть, как же выглядит робот-пылесос изнутри. Вынимаем пылесборник и основную турбощетку. Кладем робот-пылесос на лицевую панель и видим 5 отверстий для болтов. Шестое отверстие находится под наклейкой-пломбой с надписью QC Passed.
Далее необходимо аккуратно отсоединить концы бампера. Особых трудностей при этом возникнуть не должно, пластик достаточно упругий и прочный.
Расположив iClebo лицевой стороной к потолку, вытягиваем декоративную панель робота. Для этого нужно потянуть за край панели на себя и вверх. Вот мы и получили доступ к начинке робота-пылесоса.
Невооруженным взглядом можно разглядеть основные элементы. В роботе установлены 6 электроприводов: два для боковых щеток, один для турбощетки, один для всасывающего модуля (спрятан под пластиковых кожухом), два встроены в корпус боковых колес. Справа под ЖК-экраном робота-пылесоса находится его ”мозг” – микроконтроллер Abov MC81F4216D. Рядом с материнской платой и местом установки пылесборника находится специальный датчик. При его замыкании, iClebo “понимает”, что пылесборник подсоединен, иначе робот-пылесос не сдвинется с места и выдаст ошибку на дисплее.
Снимаем ЖК-экран. Видим камеру, ИК-приемник под ней. В центре светодиоды для экрана.
Освобождаем материнскую плату от множества контактов и видим гироскоп, который нужен для определения угла поворота робота.
И, наконец, освободим от всех контактов саму материнскую плату.
Что же представляет из себя такое устройство, как робот-пылесос. Блок-схема устройства представлена ниже:
У нас имеется материнская плата (Main board) с модулем камеры, дисплеем, модулем управления электроприводами боковых колес и т. д. 19ти вольтовый адаптер, через базу для зарядки робота, заряжает литий-ионный аккумулятор, который питает все остальные элементы схемы. Для часов и таймера используется дополнительная батарейка-таблетка на материнской плате. Три датчика определения перепада высоты (3 PSD Sensors) расположены на дне корпуса устройства. Три инфракрасных датчика (3 IR Sensors) располагаются непосредственно на самом бампере. При обнаружении препятствия робот-пылесос меняет свое направление. Если ИК-датчик не сработал, но робот все же упирается в препятствие, срабатывает механический датчик бампера (3 Bumper SWs). На схеме также изображены 3 Detection Switches — два датчика определяют не оторвались ли колеса от пола, а третий датчик наличия пылесборника. Passive Encoder — датчик, расположенный около передней оси колеса для определения пройденного расстояния.
Для того чтобы понять где робот уже убирался, а где еще нет, он получается информацию со всех вышеперечисленных датчиков и сенсоров. Он замеряет пройденное расстояние и угол поворота, а с помощью камеры и датчиков препятствий «понимает» где границы убираемой площади. Будущие домашние роботы-пылесосы будут использовать камеры для полноценного построения карты помещения, определения наличия людей и животных в комнате и, скорее всего, можно будет жестом указывать роботу на дальнейшие его действия или менять режим работы.
Осталось разобраться еще с колесами. Снимаем боковое колесо. Датчик сбоку колеса помогает определять роботу его положение в пространстве, а именно: стоит ли он на полу? Если контакт разомкнут, робот прекращает работу.
Разобрав корпус колеса, видим вот такой редуктор.
Конечно, всеми этими компонентами управляет ПО, и без правильно написанного программного кода робот функционировать не будет. В данном пылесосе имеется возможность обновления ПО, но сделать это смогут только опытные пользователи, так как требуется программатор для перепрошивки «мозгов» пылесоса. Используется программатор ST-Link. Основная часть прошивки робота осуществляется при помощи этого адаптера, через коннектор J2 JTAG на плате, а через J11 USB обновляется только навигационный модуль. Причем, обе части прошивки взаимосвязаны.
Робот-пылесос — сложное техническое устройство и цены на них относительно высокие, особенно если сравнивать с бытовыми пылесосами за 3000 рублей. Вероятно, когда робот сможет обходиться парой камер для выполнения всех навигационных действий, стоимость производства заметно упадет, а следовательно и конечная стоимость устройства. А пока покупатели платят по большей части за удобство: ставим таймер, уходим на работу, робот убирает в ваше отсутствие и автоматически возвращается на базу. Ну, и конечно же, лень — двигатель прогресса. Люди обычно не хотят ничего делать, лучше за них пусть будут делать всю работу другие. Как раз бытовые роботы для этого и разрабатываются.
