Эта статья открывает серию уроков, в которых мы попробуем разобраться с использованием возможностей современных физических симуляторов и программных платформ для облегчения разработки и отладки ПО при создании сложных робототехнических систем.
В качестве симулятора мы возьмем пакет Gazebo 3D, а человекоподобный DARwIn-OP, которого мы заставим играть в футбол, будет использован в качестве универсальной робототехнической платформы.
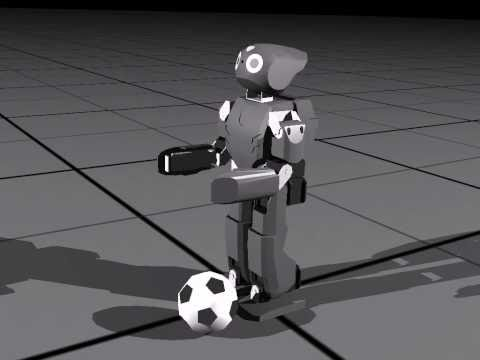
DARwIn-OP в симуляторе Gazebo
Для изучения уроков, использования примеров кода, а также написания собственных алгоритмов вам не потребуется приобретение дорогостоящего оборудования или ПО. Все программное обеспечение бесплатно, а отладка и демонстрация алгоритмов будет проводится в симуляторе. Законченный проект будет портирован на реального робота для демонстрации результатов.
В качестве симулятора мы возьмем пакет Gazebo 3D, а человекоподобный DARwIn-OP, которого мы заставим играть в футбол, будет использован в качестве универсальной робототехнической платформы.
DARwIn-OP в симуляторе Gazebo
Для изучения уроков, использования примеров кода, а также написания собственных алгоритмов вам не потребуется приобретение дорогостоящего оборудования или ПО. Все программное обеспечение бесплатно, а отладка и демонстрация алгоритмов будет проводится в симуляторе. Законченный проект будет портирован на реального робота для демонстрации результатов.