

Привет, Хабр! Позвольте представиться: меня зовут Сергей Агальцов, и я "программист по жизни". Это значит, что я давно уже IT-менеджер, а вовсе не программист по профессии, но программирование использую постоянно, как в своей основной деятельности, так и как хобби. Как часто говорил один из моих бывших начальников — "Серёга! Ты опять скатился в программирование!" Правда, не могу сказать, что этим был сильно не доволен он или кто-то другой когда-либо.
После появления Bot API у мессенджера ТамТам, я как истинный, а значит ленивый программист, создал 2 библиотеки Python для работы с ним:
- open API клиента (далее — OAC) — изначально сгенерировал её при помощи OpenAPI Generator на основе схемы API, затем адаптировал с учётом особенностей генератора;
- оболочку для этого клиента — TamTamBot (далее — TTB), упрощающую работу с OAC.
Так появился некий ТамТам Python SDK.
Сделал это я в первую очередь "для себя, для души", но также предложил и комьюнити ТамТам при желании им воспользоваться. Но, как известно, ни одно доброе дело не остаётся безнаказанным — народ попросил написать обучающую статью. И вот я здесь с этой статьёй. В ней я расскажу, как разработать простого бота при помощи этих библиотек.
Задача
Разработать бот, предназначенный для упрощения действий разработчиков ботов. Бот должен работать в режиме перманентного опроса состояния bot-api (long polling). В этой статье бот будет обучен показывать внутренности пересылаемого ему сообщения, а также настроен в соответствие разработанной функциональности.
Подразумевается, что у читателя имеется установленный Python 3, git, подключенный к среде разработки PyCharm (среда разработки может быть и другой, но рассказ будет на основе PyCharm). Желательно понимание основ ООП.
Получение токена бота
Получение токена происходит через обращение к специализированному боту @PrimeBot
Находим этого бота в ТамТам, вводим команду /create и отвечаем на вопросы:
- Введите уникальное короткое имя бота латиницей — это юзернейм бота, по которому он будет доступен через @ или по ссылке вида
https://tt.me/username. Особых ограничений на юзернейм нет. В частности, слово bot необязательно. - Введите имя — это отображаемое имя бота. Здесь уже можно кириллицей.
Если всё введено корректно, то созданный бот будет добавлен в контакты и в ответ мы получим токен — последовательность символов вида: HDyDvomx6TfsXkgwfFCUY410fv-vbf4XVjr8JVSUu4c.
Первичная настройка
Создаём каталог:
mkdir ttBotDevHelperПереходим в него:
cd ttBotDevHelper/Инициализируем хранилище git:
git initКачаем необходимые библиотеки, добавляя их как подмодули git:
git submodule add https://github.com/asvbkr/openapi_client.git openapi_client
git submodule add https://github.com/asvbkr/TamTamBot.git TamTamBotОткрываем созданный каталог в PyCharm (например из проводника по контекстному меню "Open Folder as PyCharm project") и создаём файл, который и будет содержать наш бот — File/New/Python file. В появившемся диалоге вводим имя — ttBotDevHelper, и отвечаем положительно на вопрос о добавлении в git.
Теперь нужно создать виртуальную среду для нашего проекта.
Для создания виртуальной среды выбираем File/Settings и на закладке проекта выбираем подраздел Project Interpreter. Далее, справа нажимаем на иконку шестерёнки и выбираем Add:

PyCharm предложит свой вариант размещения.

Имеет смысл с ним согласиться.
После создания виртуальной среды откроется предыдущий экран, но на нём уже будет информация о созданной среде. На этом экране необходимо установить необходимые пакеты, нажимая справа иконку с "+" и вводя имена пакетов:
- requests
- six
Затем добавляем к проекту файл .gitignore, исключающий файлы, не требующиеся в git, со следующим содержимым:
venv/
.idea/
# Byte-compiled / optimized / DLL files
__pycache__/
*.py[cod]
*$py.class
*.log
*.log.*
.env
ttb.sqlite3Добавим переменную среды с именем TT_BOT_API_TOKEN, в которой укажем значение токена нашего бота, полученного от https://tt.me/primebot и перезапустим PyCharm.
(!) Вместо добавления переменной среды непосредственно в окружение ОС, в PyCharm оптимально использовать специальный файл .env. Его настройка будет рассмотрена ниже.
Поздравляю, теперь можно приступать к самому интересному — написанию своего бота.
Запуск простейшего бота
Открываем файл ttBotDevHelper.py и пишем первые строки:
# -*- coding: UTF-8 -*-
from TamTamBot.TamTamBot import TamTamBot
class BotDevHelper(TamTamBot):
passЗдесь мы создаём класс своего бота, основываясь на классе TamTamBot.
PyCharm подсказывает, что класс BotDevHelper содержит абстрактные методы, которые необходимо имплементировать. Нажимаем Alt-Enter на названии класса, выбираем "Implement abstract methods", выбираем все методы (их 2), предложенные PyCharm и нажимаем ОК. В результате будут добавлены два пустых метода-свойства: token и description. Модифицируем получившийся код следующим образом:
# -*- coding: UTF-8 -*-
import os
from TamTamBot.TamTamBot import TamTamBot
from TamTamBot.utils.lng import set_use_django
class BotDevHelper(TamTamBot):
@property
def token(self):
return os.environ.get('TT_BOT_API_TOKEN')
@property
def description(self):
return 'Этот бот помогает в разработке и управлении ботами.\n\n' \
'This bot is an helper in the development and management of bots.'
if __name__ == '__main__':
set_use_django(False)
BotDevHelper().polling()Свойство token возвращает токен нашего бота, значение которого берётся из переменной окружения TT_BOT_API_TOKEN. Свойство description возвращает расширенное описание нашего бота, которое будет показываться пользователям.
Код в конце файла необходим для запуска нашего бота в режиме опроса состояния.
Отмечу, что базовый класс TamTamBot предполагает использование веб-сервера django для работы в режиме вебхуков. Но сейчас задача проще, и django нам не требуется, о чём мы и сообщаем в строке set_use_django(False). Здесь для объекта нашего класса вызывается метод polling(), который и обеспечивает работу в нужном режиме.
Минимум необходимого сделан. Этот код уже вполне рабочий. Запустим его на выполнение. Для этого нажмём комбинацию клавиш Ctrl-Shift-F10.
Если Вы не добавляли переменную среды ранее, непосредственно в ОС, то при запуске произойдёт ошибка с сообщением "No access_token". Для её устранения настройте PyCharm на использование .env-файла.
Создайте текстовый файл .env. Его содержимое в нашем случае должно быть следующим:
TT_BOT_API_TOKEN=токен_нашего_ботаТеперь нужно его подключить к конфигурации запуска в PyCharm:
Выбираем Run/Edit configuration и на закладке EnvFile подключаем наш .env-файл:
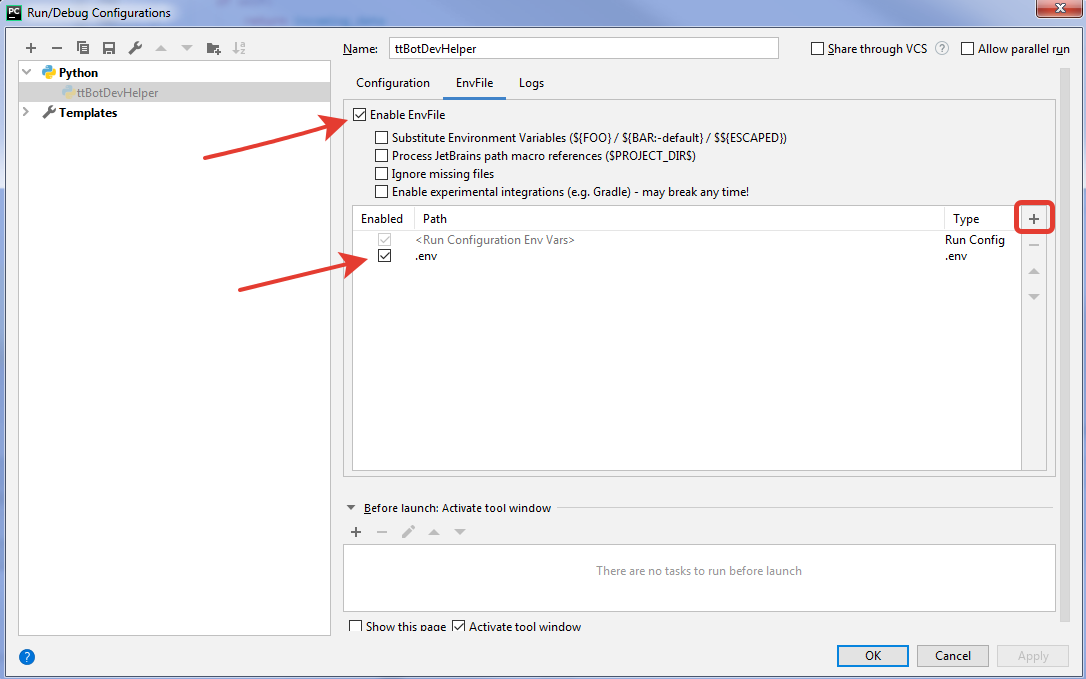
После чего нажимаем Apply.
После запуска бота можно перейти в ТамТам, открыть диалог с нашим ботом и нажать кнопку "Начать". Бот сообщит информацию о своих скрытых суперспособностях. Это и означает, что бот работает. Пока бот работает в демо-режиме, в котором доступны 4 команды. Просто ознакомьтесь с ними.
Несмотря на ярко выраженное мнение бота о своей крутости, он же робко намекает и на то, что пока ничего не умеет. Научить его всему необходимому для завоевания мира и является нашей задачей.
Приём сообщения-источника и отправка ответного сообщения с внутренним представлением сообщения-источника
Перекроем метод receive_text(), управление которому передаётся при отправке текста в чат с ботом:
def receive_text(self, update):
res = self.msg.send_message(NewMessageBody(f'Ваше сообщение: {update.message}', link=update.link), user_id=update.user_id)
return bool(res)Объект update класса UpdateCmn, который передаётся в данный метод, содержит различную полезную информацию и, в частности, всё то, что нам сейчас необходимо:
update.message— объект, содержащий само сообщение;update.link— готовая ответная ссылка на это сообщение;update.user_id— идентификатор пользователя, отправившего сообщение.
Для отправки сообщения от бота используем переменную self.msg, в которой содержится объект MessagesApi, реализовывающий функциональность, описанную в разделе messages описания API. Этот объект содержит нужный нам метод send_message(), который и обеспечивает отправку сообщений. По минимуму, в этот метод необходимо передать объект класса NewMessageBody и адресата — идентификатор пользователя, в нашем случае.
В свою очередь, объект класса NewMessageBody в данном случае создаётся посредством передачи текстового представления объекта сообщения-источника и ответной ссылки на сообшение-источник.
Перезапускаем нашего бота и проверяем в диалоге с ботом, что на любое наше сообщение бот формирует ответ, содержащий внутреннее представление объекта сообщения-источника.
Исходный код данного состояния см. здесь.
Добавление новой команды бота с параметром — показ внутреннего представления сообщения по его идентификатору
При разработке ботов зачастую требуется посмотреть внутреннее представление сообщения по одному или нескольким известным идентификаторам сообщений (message id — mid). Добавим такую функциональность нашему боту. Для этого, вначале, вынесем в отдельный метод функциональность вывода информации о внутреннем представлении сообщений:
def view_messages(self, update, list_mid, link=None):
res = False
msgs = self.msg.get_messages(message_ids=list_mid)
if msgs:
for msg in msgs.messages:
r = self.msg.send_message(NewMessageBody(f'Сообщение {msg.body.mid}:\n`{msg}`'[:NewMessageBody.MAX_BODY_LENGTH], link=link), user_id=update.user_id)
res = res or r
return resВ этот метод мы передаём список mid.
Для получения объектов сообщений мы используем метод self.msg.get_messages, возвращающий список объектов в свойстве messages.
Далее, текстовое представление каждого из полученных сообщений отправляем в наш диалог отдельными сообщениями. Чтобы избежать ошибки, текст формируемого сообщения обрезается по константе максимальной длины сообщения — NewMessageBody.MAX_BODY_LENGTH.
Затем добавим метод, обрабатывающий команду. Назовём её vmp. В команду можно будет передать список mid через пробел.
ТТБ спроектирован таким образом, что обработчик команды должен создаваться как метод с именем cmd_handler_%s, где %s — имя команды. Т.е. для команды vmp метод будет называться cmd_handler_vmp. В обработчик команды передаётся объект класса UpdateCmn. Дополнительно, для команды он может содержать свойство cmd_args, в котором содержится словарь строк и слов в них, которые были введены вместе с командой
Код будет выглядеть так:
def cmd_handler_vmp(self, update):
res = None
if not update.this_cmd_response: # Это прямой вызов команды, а не текстовый ответ на команду
if update.cmd_args: # Если вместе с командой сразу переданы аргументы
list_id = []
parts = update.cmd_args.get('c_parts') or []
if parts:
for line in parts:
for part in line:
list_id.append(str(part))
if list_id:
res = self.view_messages(update, list_id, update.link)
return bool(res)Перезапускаем бот. Теперь, если в диалоге бота набрать команду вида: /vmp mid1 mid2 (mid'ы можно взять их предыдущих проверок), то в ответ мы получим два сообщения с внутренним представлением объектов сообщений-источников, по каждому из переданных mid.
Исходный код данного состояния см. здесь.
Модификация команды бота для работы с текстовым ответом
Также можно попробовать переслать сообщение из другого канала/чата. Но в этом случае будет показано только то, что содержится в сообщении-источнике, находящемся в диалоге с ботом. В частности, при пересылке сообщения не сохраняется информация о кнопках.
Но что делать, если мы хотим увидеть информацию об оригинальном сообщении? В этом случае нужно брать mid из пересланного сообщения.
Для реализации этого режима модифицируем команду vmp таким образом, чтобы при её вызове без параметров она ожидала пересылки сообщения, а после этого брала mid пересланного сообщения и выводила информацию о нём.
(!) Для корректной работы данного функционала, боту должно быть предоставлено разрешение на чтение из канала/чата источника.
Код команды модифицируем следующим образом:
def cmd_handler_vmp(self, update):
res = None
if not update.this_cmd_response: # Это прямой вызов команды, а не текстовый ответ на команду
if update.cmd_args: # Если вместе с командой сразу переданы аргументы
list_id = []
parts = update.cmd_args.get('c_parts') or []
if parts:
for line in parts:
for part in line:
list_id.append(str(part))
if list_id:
res = self.view_messages(update, list_id, update.link)
else: # Вывод запроса для ожидания ответа
self.msg.send_message(NewMessageBody(f'Перешлите *одно* сообщение канала/чата для показа его свойств:'), user_id=update.user_id)
update.required_cmd_response = True # Сообщаем о необходимости ожидания текстового ответа
else: # Текстовый ответ команде
message = update.message
link = message.link # Доступ к пересланному сообщению через свойство link
# Проверим - пересылка ли это.
if link and link.type == MessageLinkType.FORWARD:
res = self.view_messages(update, [link.message.mid], update.link)
else:
# Выведем сообщение об ошибке и сообщим в коде возврата, что команда не отработала.
self.msg.send_message(NewMessageBody(f'Ошибка. Необходимо *переслать* сообщение из канала/чата. Повторите, пожалуйста.'), user_id=update.user_id)
return False
return bool(res)А т.к. при таком подходе увеличивается риск из-за отсутствия доступа к сообщениям, то в метод view_messages() добавим проверку на соответствие количества запрошенных/полученных сообщений:
def view_messages(self, update, list_mid, link=None):
res = False
msgs = self.msg.get_messages(message_ids=list_mid)
if msgs:
# Сравнение количества переданных mid с количеством полученных сообщений
if len(msgs.messages) < len(list_mid):
self.msg.send_message(NewMessageBody(
f'Не удалось получить все запрошенные сообщения. Проверьте доступ бота @{self.username} к каналам/чатам этих сообщений.', link=update.link
), user_id=update.user_id)
return False
else:
for msg in msgs.messages:
r = self.msg.send_message(NewMessageBody(f'Сообщение {msg.body.mid}:\n`{msg}`'[:NewMessageBody.MAX_BODY_LENGTH], link=link), user_id=update.user_id)
res = res or r
return resПерезапускаем бот, даём команду /vmp и после вывода приглашения о необходимости пересылки, пересылаем сообщение из канала/чата. При наличии у бота прав на чтение сообщений в этом канале/чате, будет выведено текстовое представление объекта пересланного сообшения. Если доступа нет, то бот сообщит о возможной проблеме и будет ожидать пересылки из корректного источника.
Настройка свойств бота
Теперь осталось навести лоск. Перекроем свойство about, возвращающее текст, который бот выводит при начале работы с ним, а также по команде /start.
@property
def about(self):
return 'Этот бот помогает в разработке и управлении ботами.'Перекроем метод get_commands(), возвращающий список команд нашего бота, отображающийся в диалоге с ботом.
def get_commands(self):
# type: () -> [BotCommand]
commands = [
BotCommand('start', 'о боте'),
BotCommand('menu', 'показать меню'),
BotCommand('vmp', 'показать свойства сообщения'),
]
return commandsПерекроем свойство main_menu_buttons, возвращающее список кнопок главного меню, вызываемого по команде /menu.
def main_menu_buttons(self):
# type: () -> []
buttons = [
# Кнопка будет выведена цветом по умолчанию - серым
[CallbackButtonCmd('О боте', 'start')],
# Кнопка будет выведена цветом для позитивных действий - синим. Также есть негативная - красная
[CallbackButtonCmd('Показать свойства сообщения', 'vmp', intent=Intent.POSITIVE)],
]
return buttonsПерезапускаем бот, убеждаемся что всё в порядке. Поздравляю, Ваш первый бот создан и, несмотря на некоторую игрушечность, обладает вполне востребованной функциональностью.
Исходный код данного состояния см. здесь.
Работающего бота @devhelpbot можно посмотреть здесь.
На этом, пока, всё. Если тема заинтересовала, то в следующих статьях могу рассмотреть дальнейшее развитие бота. Например, добавление кастомных кнопок (в частности Да/Нет) и их обработку, отсылку различного вида контента (файлы, фото и пр.), работа в режиме webhook и т.п.
Кстати, оперативно вопросы можно задать в специальном чате. Туда же направляйте и предложения/идеи.
