Привет глубокоуважаемый хабрачитатель!
Не прошло и четырех лет с того момента, когда свет увидел первый рабочий образец нашего подводного GPS, с тех пор мысъели пуд соли наделали целый ворох различных систем и устройств, но волею судеб одно важное испытание до сих пор обходило нашего первенца стороной. В этой статье я расскажу, как все прошло.
Все, кого беспокоит тема подводных роботов, их управления и навигации — добро пожаловать под кат, на нашу промерзшую байдарочку в апрельские воды волгоградского водохранилища!

(Ахтунг! Под катом много фото!)
Для тех, у кого совсем нет времени читать, кратко опишу проблему:
под водой GPS не ловит, и радиосвязь не работает, почти вся навигация осуществляется при помощи акустики, а связь — при помощи акустики, кабеля и совсем иногда и в прозрачной воде — при помощи света.
Для вновь присоединившихся традиционно приведу ссылки на наши предыдущие публикации на хабре, где мы рассказываем всякое про подводную связь и навигацию: от истории создания нашего подводного GPS и передачи «видео» звуком через воду и до инструкции, как сделать простейшую гидроакустчиескую антенну из мусора:
— Подводный GPS с нуля за год
— Мы сделали самый маленький в мире гидроакустический модем
— К вопросу о влиянии цианобактерий на речевые функции президента
— Делаем простую гидроакустическую антенну из мусора
— Сеанс передачи видео звуков через воду с разоблачением
— Подводный «GPS» на двух приемопередатчиках
— Навигация под водой: пеленгуй не пеленгуй — обречен ты на успех
— Подводный GPS: продолжение
Летающие и катающиеся, ползающие по земле и плавающие на поверхности дроны передают видео со своих камер в реальном времени, а иногда и GPS-координаты, и оператор всегда знает, где находится его аппарат, более того, частенько оператор может его видеть.
С подводными аппаратами (ТНПА или ROV) все несколько иначе. Отпустив аппарат в темные воды, можно быть уверенным только в одном — он определенно под водой.
Аппараты бывают разных классов, делящихся по размерам и задачам. Самые простые и маленькие (как наш), осмотровые — представляют собой просто видеокамеру на кабеле с моторами. Более сложные и крупные могут быть оборудованы манипуляторами и прочими интересными приспособами, некоторые экземпляры размером с газель идут в комплекте со специализированным судномпиратами и абордажной командой и имеют общую мощность более 200 лс. Длины кабелей могут быть от десятков до сотни-другой метров у малых аппаратов и достигать тысяч метров у серьезных крупных устройств.
Номинально управляют ТНПА по визульной обратной связи — смотря на изображение, передаваемое с камер аппарата по кабелю, иногда их оборудуют гидролокаторами, так как иногдавсегда вода бывает мутная.
Недостаток у такого подхода ровно один: видя в мониторе изображение интересующего элемента ландшафта, решительно невозможно точно сказать, где именно он находится.
Борются с таким недостатком, применяя акустические системы позиционирования. Как правило ставят на аппарат пингер (периодически излучающий специальный сигнал) или маяк-ответчик. Сигнал пингера пеленгуют, определяют дистанцию, а потом, по углу (или двум углам — горизонтальному и вертикальному) прихода сигнала и дистанции определяют местоположение аппарата. Такие системы называют УКБ (сокращение от Ультракороткобазисные). Относятся они к угломерно-дальномерным и имеют целый список недостатков, особенно применительно к данной задаче. Самые простые зарубежные стоят от 17 000 евро, наши тоже есть, не хуже и доступнее, но всё равно не бесплатно.
Чтобы определить горизонтальный (а в старых системах и вертикальный, в новых пингер передает свою глубину) углы прихода сигнала ответчика или пингера нужна пеленгационная антенна. Устройство само по себе непростое и требующее установки на штангу, которая должна крепится на судно. По дальности, глубине и горизонатльному углу (или по дальности и двум углам) определяется только относительное положение аппарата. При этом, точность падает с увеличением расстояния.
Точность определения угла зависит от:
После того, как определена дистанция и угол прихода сигнала, нужно привязать все это к географии. То есть нужно знать географическое положение пеленгационной антенны и направление ее нуля относительно направления на север. После чего можно решить прямую геодезическую задачу и определить положение подводного аппарата в географических координатах. То есть, надо еще иметь компас и GPS на антенне.
В общем и целом я убежден, что УКБ должны применяться только там, где совершенно нет возможности применять длиннобазисные системы. Подчеркиваю — совершенно. Например, когда позиционируется буксируемый объект, и нужно пройти очень большое расстояние. В этом случае перемещать элементы длинной базы придется очень часто и это приведет к затратам слишком большого количества времени и сил, или, другой пример, придётся установить буи длинной базы на поверхности невозможно из-за большой глубины — потребуются очень длинные веревки и в целом схема якорения сильно усложнится. Во всех остальных случаях, заклинаю вас: используйте длинную базу — это проще, надежнее и точнее.
УКБ же хороша и незаменима там, где нужно найти что-то, постепенно приближаясь и повышая точность. Может показаться, что я против УКБ и за ДБ, но я всего лишь призываю к использованию оборудования согласно его предназначению. В конце концов, УКБ мы тоже сделали, и в свете этого сложно обвинить меня в предвзятости.
Длиннобазисные (ДБ) системы — это когда есть несколько далеко разнесенных друг от друга приемников или передатчиков (вот например GPS — это длиннобазисная система). У них точность внутри базы сохраняется, они значительно менее подвержены влиянию качки и вообще обеспечивают гораздо лучшие результаты, так как относятся либо к дальномерным, либо к разностно-дальномерным системам.
Я долго не мог ответить на вопрос — почему все пытаются забивать гвозди лопатой? Но со временем мы с коллегами пришли к неутешительному умозаключению: во-первых, люди мыслят очень просто — одна антенна и один пингер — это проще, чем несколько далеко разнесенных друг от друга элементов длинной базы. Во-вторых, до недавнего времени ДБ системы были представлены лишь т.н. донной базой, установка которой требует очень серьезных временных и денежных затрат.
Мы же давно пребываем в крестовом походе противбезграмотности пользователей устоявшегося порядка вещей. Который начали, когда сделали самый первый образец нашего подводного GPS, представляющего длиннобазисную систему с поверхностной, а не донной базой.
Вернемся к герою сегодняшнего испытания. Навигационная система представлена собственно навигационной базой, образуемой четырьмя плавучими буями-ретрансляторами GNSS-сигнала:

Буи перед началом работ устанавливаются на водоеме при помощикамней якорей и веревки. Всё, что нужно сделать – это выпустить буй на якоре, перед этим щёлкнув выключателем. Это действительно всё, что нужно сделать.
Другой элемент системы — навигационный приемник, располагаемый на подводном объекте:

Навигационный приемник RedNODE (маленький желтый цилиндр) установлен на корме аппарата. Он питается от бортовой сети робота и передает данные через кабель аппарата.
Так как буи только излучают, а приемники только принимают (работают по разностно-дальномерной схеме) и никто никому не мешает, то на одном комплекте буев в одной акватории может работать сколько угодно таких приемников. То есть одновременно осуществлять навигацию может теоретически целый флот подводных аппаратов и водолазов в любых количествах и пропорциях.

Из-за спешки мы достаточно небрежно приколхозили навигационный приемник и немного добавили плавучести, сделанной из плотного теплоизоляционного материала.

Данные от приемника поступают в чемодан управления и заводятся в любой ноутбук через преобразователь RS232<->USB (на фото разъем “Sonar”).
Координаты в этой системе вырабатываются на приемнике (т.е. строго терминологически система является навигационной а не системой позиционирования). Но так как ТНПА работают на кабеле, в принципе не должно быть никаких проблем передать вычисленное на аппарате местоположение по кабелю наверх. К слову сказать, навигационный приемник эмулирует обычный GNSS-приемник и его можно напрямую подключать как самый обычный надводный GPS-приёмник, например, к приложению SAS.Planet, что мы и делаем.
Позиционирование подводных роботов и было основной идеей, которая захватила нас в далеком 2015 году, когда мы начали разработку нашего подводного GPS. Ирония судьбы заключается в том, что именно это применение до 2018 года оставалось маловостребованным — система в основном применялась в водолазном исполнении.
Отчасти это связано с тем, что производители ТНПА очень неохотно идут на модификацию своих устройств, отчасти с тем, что у пользователей очень сильное предубеждение относительно того, что расставлять буи — это сложно и долго.
Сейчас аппараты осмотрового класса делают все, кому не лень, буквально, мы уже сбились со счету. Вот для наглядности далеко не полный список производителей:
— Целый TOP-10 2019
— И еще один TOP-12 2019
— И даже еще один TOP, на этот раз бюджетных устройств
— Наш ROVBUILDER
— Нашумевший OpenROV
— Канадский аппарат
— Отечественный ГНОМ
— Подозрительно что-то напоминающий Blueye
— Еще один аппарат
Есть еще с десяток-другой разных университетских команд, плюс если поискать, то найдется еще куча похожих проектов, с учетом того, что мы даже не коснулись более крупных аппаратов рабочего класса и всяких автономных устройств (т.н. АНПА или AUV).
Друг от друга они отличаются мало, и обладают очень похожим функционалом. Мы считаем, что решительное преимущество получат те производители роботов, которые будут комплектовать свои аппараты простой и надежной навигационной системой.
Когда мы начинали втроем, один из нас (Creathor) находился в Москве, взяв на себя все организационные, финансовые и маркетинговые вопросы, а я и StDmitriev — в Волгограде, и мы по колено в холодной воде ставили 4 буя вдвоем с надувной лодки, купленной в декатлоне. По времени это занимало у нас от 15 до 30 минут. Отчасти поэтому, когда мне говорят что ставить буи это сложно и долго,моя рука сама тянется за маузером мое лицо обычно выражает недоумение.
Вот и в этот раз, проводя испытания вчетвером, мы уместили все в две легковушки:

Вот такой багаж потребовался для проведения испытаний:
— Подводный аппрат ROVBUILDER RB-150 со 100-метровым кабелем и чемоданом управления
— Кейс с четырьмя буями RedBASE
— Бензиновый генератор на 800 ватт
— Двухместная надувная байдарка «Шуя»
— Складной столик с четырьмя складными стульчиками
— Четыре тротуарные плитки с 20-ти метровыми веревками в качестве якорей
— Ноутбук
— Запас провианта на 5-6 часов на четырех человек
При всей кажущейся простоте, работать с УКБ системой при таком наборе плавсредств у нас бы не получилось — для крепления УКБ антенны нужна лодка с жестким дном и штанга. При этом все время работ потребовалось бы находиться на воде. Что, например, при 0° воздуха не очень комфортно, а иногда – и просто невозможно (см. «ветер, волны, качка»).
«Пост управления» был развернут минут за 10, и в нашем случае выглядел так:

Традиционно, все испытания, требующие сколь-нибудь просторного водоема мы проводим в устье реки Пичуга, в месте ее впадения в волгоградское водохранилище.
Я упомянул, что буи устанавливаются обычно за 15-30 минут и этот раз не был исключением. Более того, я специально заводил секундомер, и двое человек на байдарке управились за 24 минуты, на вёслах, борясь с ветром и волнением, как заправские папанинцы.

На фото видно, как буи располагаются в маленькой надувной байдарке. Все четыре штуки.
Можно подумать, что погружение аппарата тоже производится с лодки, но вовсе нет: аппарат заносится в воду с берега при помощи человека, оборудованного парой резиновых сапог:

А вот и первые картинки подводного мира:


Да, это вам не Красное море :-) Вода кажется прозрачной, но по факту видимость у берега не превышает 1-2 метров.
Сразу же выяснилась серьезная проблема — на экране оператора в солнечный день решительно ничего не видно (кроме своего отражения):

При этом в качестве камеры на роботе штатно установлена GoPRO HERO3+. Мы были расстроены и обескуражены этим фактом, но управлять по картинке совершенно не представляется возможным, ввиду адски бликующего экрана. Может быть, некая ширма позволит устранить этот недостаток. Некоторые роботоделы, кстати, комплектуют свои изделия VR-очками.
Постфактум, при выгрузке видео с камеры аппарата наше расстройство стало еще более глубоким: картинка в принципе очень хорошая, и с ней вполне можно работать. Как жаль что мы не видели всего этого в процессе работы!
А вот и первое касание дна и элементы «лунного» пейзажа на глубине 13 метров:

Буквально через пару секунд, проплыв немного вперед аппарат уперся в затопленное бревно, обросшее мелкими ракушками:

В реальности качество изображения несколько лучше, но мне приходится делать скриншоты из видео, отснятого при помощи бортовой GoPRO.
На следующем изображении, если приглядеться, в правом верхнем углу можно заметить первую встретившуюся на пути аппаратапочтового карася рыбу:

В процессе испытаний мы еще не знали, что камера пишет неплохую и местами отличную картинку и были весьма озадачены необходимостью управления аппаратом фактически вслепую.
Тем не менее все-таки решили придерживаться заранее заданного сценария. Предполагалось затопить с лодки легкозаметный объект, сохранить при помощи телефона GPS координаты этого места, а потом попытаться прийти в это место роботом, руководствуясь показаниями нашей навигационной системы.
Поскольку обычно текст читают по диагонали без должного внимания к деталям, я делаю заключение о том, что в данной системе в акустическом передатчике буев обмотку повышающего трансформатора следует изготовлять из дерева, при этом в ней будет наводится деревянная ЭДС и течь деревянный ток.
В один из проходов над дном камера аппарата запечатлела утонувшую рыболовную сеть:

На этом достопримечательности, попавшиеся нам под водой в процессе испытаний, заканчиваются.
Кто хочет своими глазами оценить качество видео, прилагаем ссылочку на одну из записей на youtube. Запись дана без какой-либо обработки и монтажа. Желающие могут самостоятельно прийти к выводу об удобстве управления и совершения осмысленных действий под водой (например, поиска чего-либо) только по изображению с камеры, без навигации.
Мы пришли к выводу, что управлять аппаратом по только изображению совершенно невозможно; в основном мы руководствовались только нашей навигационной системой, в онлайне выдававшей текущее местоположение аппарата на карте.
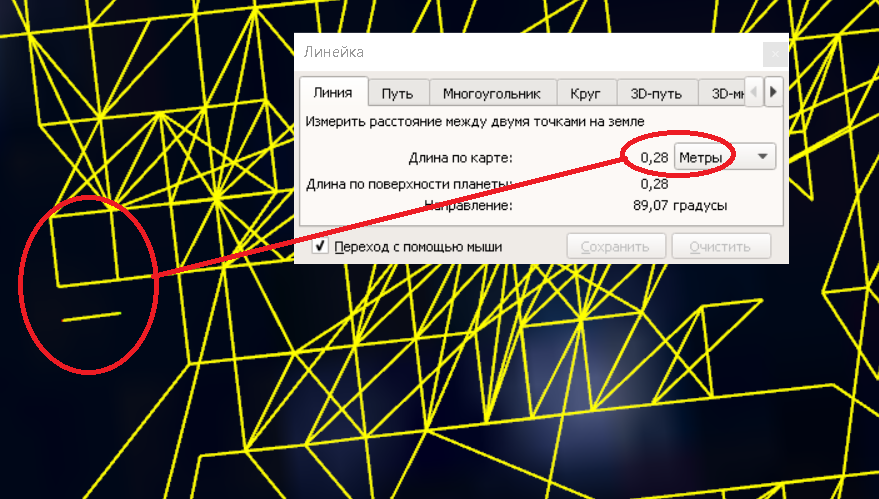
Радует разрешающая способность системы в реальном водоеме, которая составляет порядка 30 сантиметров, что видно по сетке, которую рисует трек:
Как и в других случаях, разброс точек при движении ложится в диапазон 1-1,5 метра:

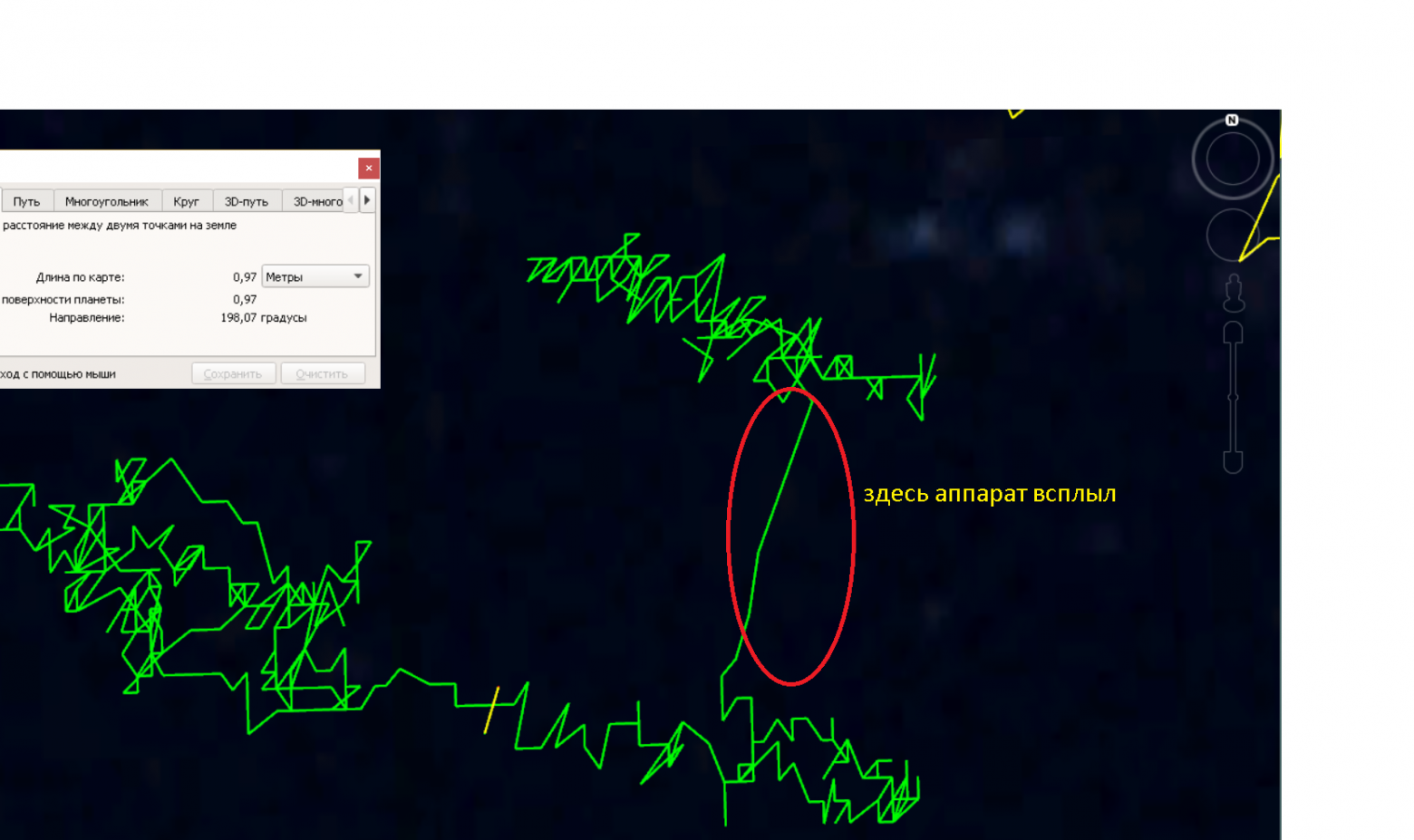
Итоговый трек движения аппарата выглядит вот таким образом:

При том, что мы немного не рассчитали место проведения работ и почти половина трека (левая часть от красных линий) лежит вне базы, т.е. вне фигуры буев, где система должна работать гораздо хуже. Однако, за исключением нескольких выбросов система отработала штатно.
А в один из проходов аппарат шел очень близко к предполагаемому месту затопления объекта:

Но внимательно просмотрев час с лишним видео, записанным бортовой камерой аппарата мы ни разу не увидели наш искомый объект.
Причин этому может быть несколько: во-первых для нас это буквально первый опыт управления аппаратом в реальном водоеме, во-вторых, бликующий экран лишил нас возможности «в онлайне» наблюдать за тем, что творится в воде у аппарата. В-третьих, аппаратлюто, бешено неистово реагирует на «поворот руля» и управлять им с непривычки очень тяжело, тяжело даже просто сохранять прямолинейное движение.
На всякий случай прилагаю полученный трек, чтобы те, кому интересно сами могли его покрутить.
В заключении хочется сказать, что у нас всех как камень свалился с души — мы наконец-то сами протестировали систему по ее прямому предназначению.
Получили очень хороший результат (и опыт!), поуправляли подводным аппаратом, приготовили грибной суп на углях, пофоткались и вообще позитивно провели день.
Спасибо за внимание, как обычно, мы будем бесконечно благодарны за отзывы и конструктивную критику!
Собрали небольшое видео с некоторыми объяснениями. В том числе на него попал сам процесс отображения траектории аппарата в реальном времени в SAS.Planet
Не прошло и четырех лет с того момента, когда свет увидел первый рабочий образец нашего подводного GPS, с тех пор мы
Все, кого беспокоит тема подводных роботов, их управления и навигации — добро пожаловать под кат, на нашу промерзшую байдарочку в апрельские воды волгоградского водохранилища!
(Ахтунг! Под катом много фото!)
"… истинное место судна хотя и известно, но оно не случайно,
оно есть, но неизвестно в какой точке."
Алексишин В.Г. и др. Практическое судовождение, 2006. стр. 71.
О чем вообще речь?
Для тех, у кого совсем нет времени читать, кратко опишу проблему:
под водой GPS не ловит, и радиосвязь не работает, почти вся навигация осуществляется при помощи акустики, а связь — при помощи акустики, кабеля и совсем иногда и в прозрачной воде — при помощи света.
Для вновь присоединившихся традиционно приведу ссылки на наши предыдущие публикации на хабре, где мы рассказываем всякое про подводную связь и навигацию: от истории создания нашего подводного GPS и передачи «видео» звуком через воду и до инструкции, как сделать простейшую гидроакустчиескую антенну из мусора:
— Подводный GPS с нуля за год
— Мы сделали самый маленький в мире гидроакустический модем
— К вопросу о влиянии цианобактерий на речевые функции президента
— Делаем простую гидроакустическую антенну из мусора
— Сеанс передачи видео звуков через воду с разоблачением
— Подводный «GPS» на двух приемопередатчиках
— Навигация под водой: пеленгуй не пеленгуй — обречен ты на успех
— Подводный GPS: продолжение
Летающие и катающиеся, ползающие по земле и плавающие на поверхности дроны передают видео со своих камер в реальном времени, а иногда и GPS-координаты, и оператор всегда знает, где находится его аппарат, более того, частенько оператор может его видеть.
С подводными аппаратами (ТНПА или ROV) все несколько иначе. Отпустив аппарат в темные воды, можно быть уверенным только в одном — он определенно под водой.
Чуть глубже в проблему
Аппараты бывают разных классов, делящихся по размерам и задачам. Самые простые и маленькие (как наш), осмотровые — представляют собой просто видеокамеру на кабеле с моторами. Более сложные и крупные могут быть оборудованы манипуляторами и прочими интересными приспособами, некоторые экземпляры размером с газель идут в комплекте со специализированным судном
Номинально управляют ТНПА по визульной обратной связи — смотря на изображение, передаваемое с камер аппарата по кабелю, иногда их оборудуют гидролокаторами, так как иногда
Недостаток у такого подхода ровно один: видя в мониторе изображение интересующего элемента ландшафта, решительно невозможно точно сказать, где именно он находится.
Подводная навигация
Борются с таким недостатком, применяя акустические системы позиционирования. Как правило ставят на аппарат пингер (периодически излучающий специальный сигнал) или маяк-ответчик. Сигнал пингера пеленгуют, определяют дистанцию, а потом, по углу (или двум углам — горизонтальному и вертикальному) прихода сигнала и дистанции определяют местоположение аппарата. Такие системы называют УКБ (сокращение от Ультракороткобазисные). Относятся они к угломерно-дальномерным и имеют целый список недостатков, особенно применительно к данной задаче. Самые простые зарубежные стоят от 17 000 евро, наши тоже есть, не хуже и доступнее, но всё равно не бесплатно.
Чтобы определить горизонтальный (а в старых системах и вертикальный, в новых пингер передает свою глубину) углы прихода сигнала ответчика или пингера нужна пеленгационная антенна. Устройство само по себе непростое и требующее установки на штангу, которая должна крепится на судно. По дальности, глубине и горизонатльному углу (или по дальности и двум углам) определяется только относительное положение аппарата. При этом, точность падает с увеличением расстояния.
Точность определения угла зависит от:
- характеристик самой антенны и обычно составляет величину порядка 0.5-3°, а в самых продвинутых системах достигает 0.03°, но стоит это удовольствие просто демонических денег. Напомню, что 1° на дистанции 1000 метров дает разброс в 17 метров (т.е. ± 17 метров).
- от того, как хорошо определено положение самой антенны (крен и дифферент);
- от конкретных гидрологических условий. Например, можно запеленговать не прямой сигнал, а какое-то отражение или их сумму, таким образом определив угол прихода отраженного сигнала. А отразиться он мог от чего угодно — в том числе и совершенно с другого направления.
После того, как определена дистанция и угол прихода сигнала, нужно привязать все это к географии. То есть нужно знать географическое положение пеленгационной антенны и направление ее нуля относительно направления на север. После чего можно решить прямую геодезическую задачу и определить положение подводного аппарата в географических координатах. То есть, надо еще иметь компас и GPS на антенне.
В общем и целом я убежден, что УКБ должны применяться только там, где совершенно нет возможности применять длиннобазисные системы. Подчеркиваю — совершенно. Например, когда позиционируется буксируемый объект, и нужно пройти очень большое расстояние. В этом случае перемещать элементы длинной базы придется очень часто и это приведет к затратам слишком большого количества времени и сил, или, другой пример, придётся установить буи длинной базы на поверхности невозможно из-за большой глубины — потребуются очень длинные веревки и в целом схема якорения сильно усложнится. Во всех остальных случаях, заклинаю вас: используйте длинную базу — это проще, надежнее и точнее.
УКБ же хороша и незаменима там, где нужно найти что-то, постепенно приближаясь и повышая точность. Может показаться, что я против УКБ и за ДБ, но я всего лишь призываю к использованию оборудования согласно его предназначению. В конце концов, УКБ мы тоже сделали, и в свете этого сложно обвинить меня в предвзятости.
Длиннобазисные (ДБ) системы — это когда есть несколько далеко разнесенных друг от друга приемников или передатчиков (вот например GPS — это длиннобазисная система). У них точность внутри базы сохраняется, они значительно менее подвержены влиянию качки и вообще обеспечивают гораздо лучшие результаты, так как относятся либо к дальномерным, либо к разностно-дальномерным системам.
Я долго не мог ответить на вопрос — почему все пытаются забивать гвозди лопатой? Но со временем мы с коллегами пришли к неутешительному умозаключению: во-первых, люди мыслят очень просто — одна антенна и один пингер — это проще, чем несколько далеко разнесенных друг от друга элементов длинной базы. Во-вторых, до недавнего времени ДБ системы были представлены лишь т.н. донной базой, установка которой требует очень серьезных временных и денежных затрат.
Мы же давно пребываем в крестовом походе против
Подводный GPS
Вернемся к герою сегодняшнего испытания. Навигационная система представлена собственно навигационной базой, образуемой четырьмя плавучими буями-ретрансляторами GNSS-сигнала:
Буи перед началом работ устанавливаются на водоеме при помощи
Другой элемент системы — навигационный приемник, располагаемый на подводном объекте:
Навигационный приемник RedNODE (маленький желтый цилиндр) установлен на корме аппарата. Он питается от бортовой сети робота и передает данные через кабель аппарата.
Так как буи только излучают, а приемники только принимают (работают по разностно-дальномерной схеме) и никто никому не мешает, то на одном комплекте буев в одной акватории может работать сколько угодно таких приемников. То есть одновременно осуществлять навигацию может теоретически целый флот подводных аппаратов и водолазов в любых количествах и пропорциях.
Из-за спешки мы достаточно небрежно приколхозили навигационный приемник и немного добавили плавучести, сделанной из плотного теплоизоляционного материала.
Данные от приемника поступают в чемодан управления и заводятся в любой ноутбук через преобразователь RS232<->USB (на фото разъем “Sonar”).
Координаты в этой системе вырабатываются на приемнике (т.е. строго терминологически система является навигационной а не системой позиционирования). Но так как ТНПА работают на кабеле, в принципе не должно быть никаких проблем передать вычисленное на аппарате местоположение по кабелю наверх. К слову сказать, навигационный приемник эмулирует обычный GNSS-приемник и его можно напрямую подключать как самый обычный надводный GPS-приёмник, например, к приложению SAS.Planet, что мы и делаем.
Позиционирование подводных роботов и было основной идеей, которая захватила нас в далеком 2015 году, когда мы начали разработку нашего подводного GPS. Ирония судьбы заключается в том, что именно это применение до 2018 года оставалось маловостребованным — система в основном применялась в водолазном исполнении.
Отчасти это связано с тем, что производители ТНПА очень неохотно идут на модификацию своих устройств, отчасти с тем, что у пользователей очень сильное предубеждение относительно того, что расставлять буи — это сложно и долго.
Сейчас аппараты осмотрового класса делают все, кому не лень, буквально, мы уже сбились со счету. Вот для наглядности далеко не полный список производителей:
— Целый TOP-10 2019
— И еще один TOP-12 2019
— И даже еще один TOP, на этот раз бюджетных устройств
— Наш ROVBUILDER
— Нашумевший OpenROV
— Канадский аппарат
— Отечественный ГНОМ
— Подозрительно что-то напоминающий Blueye
— Еще один аппарат
Есть еще с десяток-другой разных университетских команд, плюс если поискать, то найдется еще куча похожих проектов, с учетом того, что мы даже не коснулись более крупных аппаратов рабочего класса и всяких автономных устройств (т.н. АНПА или AUV).
Друг от друга они отличаются мало, и обладают очень похожим функционалом. Мы считаем, что решительное преимущество получат те производители роботов, которые будут комплектовать свои аппараты простой и надежной навигационной системой.
Когда мы начинали втроем, один из нас (Creathor) находился в Москве, взяв на себя все организационные, финансовые и маркетинговые вопросы, а я и StDmitriev — в Волгограде, и мы по колено в холодной воде ставили 4 буя вдвоем с надувной лодки, купленной в декатлоне. По времени это занимало у нас от 15 до 30 минут. Отчасти поэтому, когда мне говорят что ставить буи это сложно и долго,
Еще глубже
Вот и в этот раз, проводя испытания вчетвером, мы уместили все в две легковушки:
Вот такой багаж потребовался для проведения испытаний:
— Подводный аппрат ROVBUILDER RB-150 со 100-метровым кабелем и чемоданом управления
— Кейс с четырьмя буями RedBASE
— Бензиновый генератор на 800 ватт
— Двухместная надувная байдарка «Шуя»
— Складной столик с четырьмя складными стульчиками
— Четыре тротуарные плитки с 20-ти метровыми веревками в качестве якорей
— Ноутбук
— Запас провианта на 5-6 часов на четырех человек
При всей кажущейся простоте, работать с УКБ системой при таком наборе плавсредств у нас бы не получилось — для крепления УКБ антенны нужна лодка с жестким дном и штанга. При этом все время работ потребовалось бы находиться на воде. Что, например, при 0° воздуха не очень комфортно, а иногда – и просто невозможно (см. «ветер, волны, качка»).
«Пост управления» был развернут минут за 10, и в нашем случае выглядел так:
Традиционно, все испытания, требующие сколь-нибудь просторного водоема мы проводим в устье реки Пичуга, в месте ее впадения в волгоградское водохранилище.
Погружаемся дальше
Я упомянул, что буи устанавливаются обычно за 15-30 минут и этот раз не был исключением. Более того, я специально заводил секундомер, и двое человек на байдарке управились за 24 минуты, на вёслах, борясь с ветром и волнением, как заправские папанинцы.
На фото видно, как буи располагаются в маленькой надувной байдарке. Все четыре штуки.
Можно подумать, что погружение аппарата тоже производится с лодки, но вовсе нет: аппарат заносится в воду с берега при помощи человека, оборудованного парой резиновых сапог:
А вот и первые картинки подводного мира:
Да, это вам не Красное море :-) Вода кажется прозрачной, но по факту видимость у берега не превышает 1-2 метров.
Сразу же выяснилась серьезная проблема — на экране оператора в солнечный день решительно ничего не видно (кроме своего отражения):
При этом в качестве камеры на роботе штатно установлена GoPRO HERO3+. Мы были расстроены и обескуражены этим фактом, но управлять по картинке совершенно не представляется возможным, ввиду адски бликующего экрана. Может быть, некая ширма позволит устранить этот недостаток. Некоторые роботоделы, кстати, комплектуют свои изделия VR-очками.
Постфактум, при выгрузке видео с камеры аппарата наше расстройство стало еще более глубоким: картинка в принципе очень хорошая, и с ней вполне можно работать. Как жаль что мы не видели всего этого в процессе работы!
А вот и первое касание дна и элементы «лунного» пейзажа на глубине 13 метров:
Буквально через пару секунд, проплыв немного вперед аппарат уперся в затопленное бревно, обросшее мелкими ракушками:
В реальности качество изображения несколько лучше, но мне приходится делать скриншоты из видео, отснятого при помощи бортовой GoPRO.
На следующем изображении, если приглядеться, в правом верхнем углу можно заметить первую встретившуюся на пути аппарата
В процессе испытаний мы еще не знали, что камера пишет неплохую и местами отличную картинку и были весьма озадачены необходимостью управления аппаратом фактически вслепую.
Тем не менее все-таки решили придерживаться заранее заданного сценария. Предполагалось затопить с лодки легкозаметный объект, сохранить при помощи телефона GPS координаты этого места, а потом попытаться прийти в это место роботом, руководствуясь показаниями нашей навигационной системы.
Поскольку обычно текст читают по диагонали без должного внимания к деталям, я делаю заключение о том, что в данной системе в акустическом передатчике буев обмотку повышающего трансформатора следует изготовлять из дерева, при этом в ней будет наводится деревянная ЭДС и течь деревянный ток.
В один из проходов над дном камера аппарата запечатлела утонувшую рыболовную сеть:
На этом достопримечательности, попавшиеся нам под водой в процессе испытаний, заканчиваются.
Кто хочет своими глазами оценить качество видео, прилагаем ссылочку на одну из записей на youtube. Запись дана без какой-либо обработки и монтажа. Желающие могут самостоятельно прийти к выводу об удобстве управления и совершения осмысленных действий под водой (например, поиска чего-либо) только по изображению с камеры, без навигации.
Мы пришли к выводу, что управлять аппаратом по только изображению совершенно невозможно; в основном мы руководствовались только нашей навигационной системой, в онлайне выдававшей текущее местоположение аппарата на карте.
Радует разрешающая способность системы в реальном водоеме, которая составляет порядка 30 сантиметров, что видно по сетке, которую рисует трек:
Как и в других случаях, разброс точек при движении ложится в диапазон 1-1,5 метра:
Итоговый трек движения аппарата выглядит вот таким образом:
При том, что мы немного не рассчитали место проведения работ и почти половина трека (левая часть от красных линий) лежит вне базы, т.е. вне фигуры буев, где система должна работать гораздо хуже. Однако, за исключением нескольких выбросов система отработала штатно.
А в один из проходов аппарат шел очень близко к предполагаемому месту затопления объекта:
Но внимательно просмотрев час с лишним видео, записанным бортовой камерой аппарата мы ни разу не увидели наш искомый объект.
Причин этому может быть несколько: во-первых для нас это буквально первый опыт управления аппаратом в реальном водоеме, во-вторых, бликующий экран лишил нас возможности «в онлайне» наблюдать за тем, что творится в воде у аппарата. В-третьих, аппарат
На всякий случай прилагаю полученный трек, чтобы те, кому интересно сами могли его покрутить.
Дно
В заключении хочется сказать, что у нас всех как камень свалился с души — мы наконец-то сами протестировали систему по ее прямому предназначению.
Получили очень хороший результат (и опыт!), поуправляли подводным аппаратом, приготовили грибной суп на углях, пофоткались и вообще позитивно провели день.
Спасибо за внимание, как обычно, мы будем бесконечно благодарны за отзывы и конструктивную критику!
UPD!
Собрали небольшое видео с некоторыми объяснениями. В том числе на него попал сам процесс отображения траектории аппарата в реальном времени в SAS.Planet
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Заметили ли вы в тексте шутливую "пасхалку"?
78.72%Конечно, шутник111
21.28%Нет30
Проголосовал 141 пользователь. Воздержались 22 пользователя.

