
Сегодня мы объединяем программу управления автономным дроном с программой обнаружения шарика, дабы лопнуть уже шарик автономным дроном.
В предыдущих статьях мы рассматривали запуск автономного виртуального и реального дрона, а также разработку ROS-ноды, определяющей и передающей координаты шарика в пространстве. Теперь переделаем программу управления дроном так, чтобы он автоматически стремился лопнуть шарик.
Программа, летящая к шарику
В основе программы, летящей к шарику – тот же цикл управления скоростями, что и в программе ручного управления.
Отличие – в том, что вместо клавиш управления с клавиатуры вектором скоростей дрона управляет информация о положении шарика, полученная из топика /baloon_detector/twist.
Скорости setvel_forward и вектор setvel устанавливаются таким образом, чтоб дрон летел прямо в шарик.
Если дрон не видит шарик более чем 0.2 секунды – считаем, что мы его лопнули, и переводим дрон в режим посадки.
#!/usr/bin/env python # coding=UTF-8 # baloon position steering import rospy import mavros import mavros.command as mc from mavros_msgs.msg import State from geometry_msgs.msg import PoseStamped, Twist, Quaternion, TwistStamped from mavros_msgs.srv import CommandBool from mavros_msgs.srv import SetMode import tf.transformations as t import math current_state=State() current_pose = PoseStamped() current_vel = Twist() baloon_twist = TwistStamped() def state_callback(data): global current_state current_state=data def localpose_callback(data): global current_pose current_pose = data def baloon_callback(data): global baloon_twist baloon_twist = data def publish_setvel(event): global current_pose, setvel_pub, setvel, setvel_forward, baloon_twist q=current_pose.pose.orientation.x, current_pose.pose.orientation.y,current_pose.pose.orientation.z,current_pose.pose.orientation.w roll, pitch, yaw = t.euler_from_quaternion(q) setvel.linear.x = setvel_forward * math.cos(yaw) setvel.linear.y = setvel_forward * math.sin(yaw) setvel_pub.publish(setvel) def main(): global current_pose, setvel, setvel_pub, setvel_forward, baloon_twist rospy.init_node("offbrd",anonymous=True) rate=rospy.Rate(10) state=rospy.Subscriber("/mavros/state",State,state_callback) pose_sub=rospy.Subscriber("/mavros/local_position/pose",PoseStamped,localpose_callback) baloon_sub=rospy.Subscriber("/baloon_detector/twist",TwistStamped,baloon_callback) setvel_pub=rospy.Publisher("/mavros/setpoint_velocity/cmd_vel_unstamped",Twist,queue_size=1) arming_s=rospy.ServiceProxy("/mavros/cmd/arming",CommandBool) set_mode=rospy.ServiceProxy("/mavros/set_mode",SetMode) setvel=Twist() setvel_forward = 0 arming_s(True) set_mode(0,"AUTO.TAKEOFF") print 'Taking off.....\r' rospy.sleep(5) for i in range (0,10): setvel_pub.publish(setvel) rate.sleep() set_mode(0,"OFFBOARD") setvel_timer = rospy.Timer(rospy.Duration(0.05), publish_setvel) while not rospy.is_shutdown(): time_delay = rospy.Time.now().to_sec() - baloon_twist.header.stamp.to_sec() #print baloon_twist print 'time delay = ',time_delay if time_delay<0.2:#последний раз шарик видели 0.2 секунды назад if baloon_twist.twist.linear.x > 0.8: setvel_forward = 1.5 elif baloon_twist.twist.linear.x > 0.8: setvel_forward = 0.0 else: setvel_forward = -0.5 setvel.angular.z = baloon_twist.twist.angular.z*4 if baloon_twist.twist.angular.y<0: setvel.linear.z=0.5 elif baloon_twist.twist.angular.y>0.2: setvel.linear.z=-0.25 else: setvel.linear.z=0 else:#шарик потерян из виду setvel.angular.z=setvel_forward=setvel.linear.z=0 print setvel, setvel_forward rate.sleep() set_mode(0,"AUTO.LAND") print 'Landing.......\r' setvel_timer.shutdown() rospy.sleep(5) if __name__=="__main__": main()
Рекомендации по отладке
Для отладки рекомендуем выбирать открытое пространство, прикрепить шарик к основанию, убедиться, что рядом нет красных предметов, чтобы не было ложных срабатываний программы наведения.
Работу программы наведения, до полёта, следует проверить с помощью браузера, по адресу 192.168.11.1:8080:
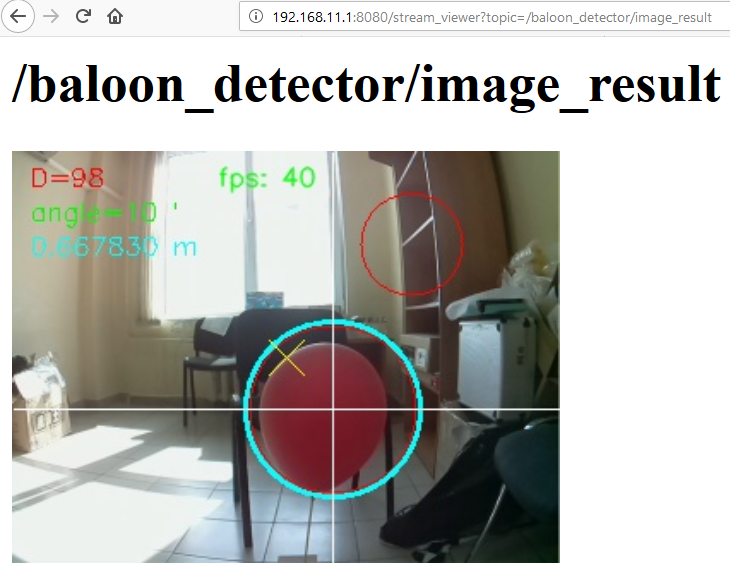
Если всё настроено правильно – программа должна уверенно различать шарик и не вызывать ложных срабатываний.

При старте программы наведения подразумевается, что дрон должен увидеть шарик после взлёта. Иначе дрон подумает, что шарик уже лопнул, и перейдёт в режим посадки.
В дальнейшем можно модифицировать программу – осуществить подлёт к шарику, например, с помощью режима AUTO.MISSION. И уже после достижения нужной GPS-точки перейти в режим визуального поиска.
Подбор коэффициентов для скоростей в основном цикле программы осуществляется экспериментальным образом для конкретного дрона.
На соревнованиях попытки лопанья шарика выглядели так:
Буду благодарен за комментарии и вопросы от тех, кто попытается повторить наш эксперимент.
Исходные коды программ выложены на Гитхабе.

