

Немногим более года назад мне повезло: я стал частью команды ученых и инженеров, ответственной за управление марсоходом «Кьюриосити». С тех пор я узнал МНОГО нового о марсоходах. Но еще больше только предстоит узнать. «Спирит», «Оппортьюнити», «Кьюриосити» и «Персеверанс» — одни из самых сложных и в то же время надежных роботов, когда-либо созданных человеком. В то же время инструменты и методы, которые применяются для управления марсоходами, достаточно просты в освоении и доступны пониманию. И это хорошо, поскольку 18 февраля «Персерванс» опустится на поверхность Марса, после чего его отправят на изучение планеты. Сейчас моя задача — рассказать о том, как управлять марсоходом. Когда новый ровер прилетит на Марс, вы уже будете понимать, что происходит и как все это работает.
Большая часть этой статьи — изложение моего опыта управления «Кьюриосити». Имейте в виду, что «Спирит» и «Оппортьюнити» во многом похожи в этом плане на своего «наследника». Для управления «Персерванс» будут использоваться те же технологии и методы, так что слишком значительных отличий нет.
Основы
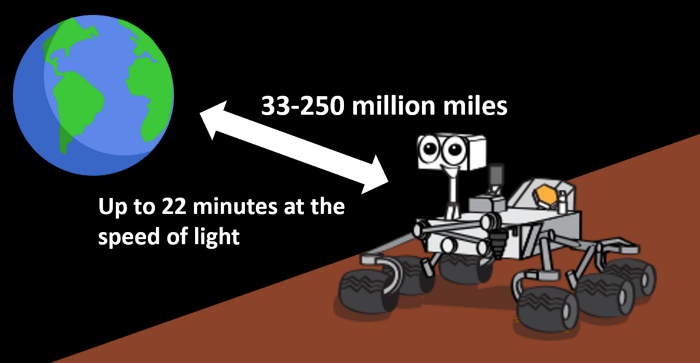
Главное, что нужно знать, — Марс от нас очень, очень далеко. Радиосигнал, отправленный с Земли, достигает поверхности Марса через 22 минуты. Поэтому управление в режиме реального времени — не вариант. Кроме того, «Кьюриосити» получает информацию с Земли раз в день. Все остальное время он предоставлен сам себе. При этом о какой-либо автономности речь не идет: у марсохода ограниченный набор действий, которые он может выполнять самостоятельно. Большая часть того, что делает ровер, запланировано и прописано в памяти устройства еще на Земле.
Конечно, есть и парочка исключений: некоторые проблемы марсоход должен уметь решать самостоятельно. Но большинство таких решений» — остановка и ожидание инструкций с Земли в ответ на какой-либо внешний фактор. Определенной степенью автономности обладает Aegis — система, которая может самостоятельно выбрать кусок породы, в который «Кьюриосити» должен «выстрелить» лазером.
Смотри под ноги
Главная задача оператора ровера — обеспечить его безопасность на протяжении всего пути на Марсе. Поэтому надо тщательно оценивать все возможные варианты своих действий. У марсоходов НАСА есть несколько камер, благодаря которым ровер формирует «картинку», как бы увиденную глазами человека. Есть также hazcams, «камеры опасности», которые оценивают наличие проблем поблизости, а также navcams — навигационные камеры, оценивающие дорогу впереди. Есть еще и другие камеры, которые, правда, по большей части используются для выполнения научных задач, поэтому я воздержусь от описания принципа их работы.

В большинстве случаев для визуальной оценки участка пути ровера используются как раз navcams. Изображения, получаемые ими, можно посмотреть в качестве объемной «картинки» на Земле. В НАСА разработали специализированное ПО, которое предназначено для визуализации окружающей ровер местности и для создания виртуальной модели ровера и участка ландшафта вокруг него. Эта виртуальная модель используется для тестирования планируемых операторами действий. Если эмуляция прошла хорошо, команды можно отправлять на Марс. Таким образом, ученые избавляют себя от возможных негативных последствий отправки непроверенной команды.
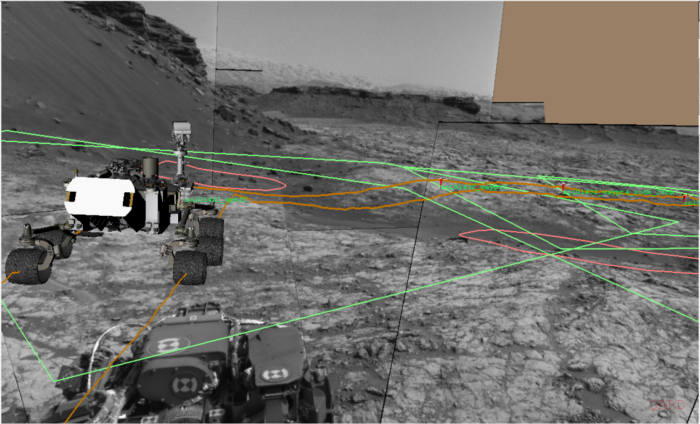
Вот как выглядит эмуляция движения ровера после того, как модель полностью готова. Серые области — участок Марса, по которому роверу предстоит проехать в ближайшем будущем. Оранжево-коричневые линии — это, собственно, путь ровера. В день моделируется около 30 метров поверхности, камеры просто не могут собрать больше информации, поэтому марсоход проезжает именно столько.
А вот наложение смоделированного пути ровера на реальные снимки, полученные навигационными камерами.
При планировании движения марсохода нужно учитывать несколько важных моментов. Например, размер объектов, встречающихся по пути. Максимальный размер, с которым может справиться ровер, — около 50 см. Все, что больше, нужно обогнуть. Песок (это не совсем песок, но будем называть его так) тоже желательно огибать: если его много, ровер может застрять. Даже небольшие куски породы представляют собой опасность, так как их острые края повреждают колеса ровера.
Быстро, не очень или медленно?
После того как ученые определились с направлением движения, нужно понять, как именно двигаться. Есть три режима: слепой режим, визуальная одометрия и autonav.
Слепой режим — самый простой способ движения из возможных. Марсоход в этом случае будет следовать инструкциям, присланным с Земли, и не обращать ни на что внимания. В идеале это отличный метод управления марсоходом, но условия на Марсе далеки от идеала. Зачастую внешние факторы влияют на продвижение к цели. Это может быть, например, скольжение колес по поверхности, так что марсоход вместо того, чтобы продвинуться на 10 метров, продвигается на 9 или даже 5.
Отличный способ понять, что такое слепое управление, — закрыть глаза и попробовать пройти по определенной траектории. Например, 7 метров вперед, затем повернуть на 30 градусов налево и пройти еще 4 метра. Мы в этом случае вообще не представляем, что происходит вокруг, и не адаптируемся к меняющимся условиям.
В целом, слепое управление — не лучший вариант, но он позволяет марсоходу двигаться быстро, поскольку системе не нужно останавливаться для того, чтобы сделать снимки. На максимальной скорости марсоход может проехать на длину футбольного поля всего за час. Но этот вариант выбирается только в том случае, если вокруг нет потенциально опасных объектов.
Визуальная одометрия применяется операторами чаще. В этом случае марсоход останавливается через каждый метр для того, чтобы сделать снимок грунта камерами. Бортовой компьютер затем оценивает изображение, сравнивает его с предыдущим и пытается понять, что изменилось вокруг, включая местоположение марсохода. Затем компьютер отправляет новые навигационные команды, позволяющие держаться запланированного пути.
Этот способ похож на предыдущий, только в процессе продвижения каждые пару шагов нужно останавливаться, чтобы открыть глаза и оглядеться.
Визуальная одометрия — баланс между скоростью и точностью движения. Метод крайне важен, поскольку помогает обнаружить препятствия на пути ровера и избежать их.
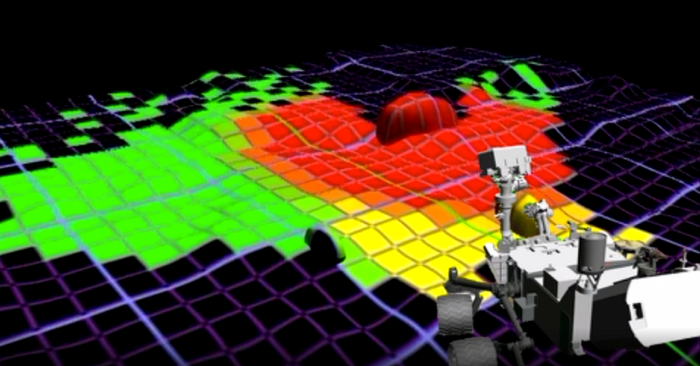
Автонавигация, или autonav, — наиболее технологически совершенный метод. Его можно сравнить с использованием беспилотника в автомобиле. Задаем общую цель и ровер сам ищет безопасный и быстрый путь к цели. Марсоходу приходится останавливаться через каждый метр, чтобы оценить обстановку при помощи камер. Но вместо того, чтобы сделать один снимок при помощи навигационных камер, марсоход задействует и hazcams. Затем бортовой компьютер объединяет всю эту информацию, формируя «карту опасности». Проблемные места отмечены красным цветом, места, где ситуация не столь плачевна, — желтым, а максимально подходящая для продвижения роутера местность отмечается зеленым цветом.
Это самый медленный вариант продвижения для марсохода. Если в идеальной ситуации ровер может пройти на длину футбольного поля при помощи слепого метода, как говорилось выше (это примерно 100 м), то в случае автономного режима в идеальных условиях марсоход пройдет всего 30 метров.
При этом ровер не умеет обнаруживать песок или острые камни, так что метод используют только тогда, когда местность абсолютно безопасна.
Чего можно ждать от «Персеверанс»?
НАСА ожидает, что новый марсоход опустится на поверхность планеты уже 18 февраля. После этого, надеюсь, он начнет продвижение по Марсу. Все, о чем я говорил выше, относится и к новому марсоходу, но у него больше возможностей. Например, он сможет двигаться минимум в два раза быстрее «Кьюриосити»: у бортового ПК больше вычислительных ресурсов и улучшенные алгоритмы обработки данных. Навигационные камеры робота цветные, они получают изображения большего, нежели у «Кьюриосити», разрешения. Кроме того, колеса у ровера толще, чем у предшественника, и другой рисунок протекторов. Ученые считают, что колеса будут меньше повреждаться.
Одна из важнейших задач для марсохода: сбор и хранение образцов для возвращения на Землю. От успеха этой миссии зависит очень многое. И теперь, когда ровер начнет двигаться, вы будете понимать, что и как обеспечивает это движение.
Примечание: Эван Хильгеманн (Evan Hilgemann) — инженер-механик из Лаборатории реактивного движения НАСА (Jet Propulsion Laboratory или JPL).

