

Планирование – это процесс распределения ресурсов системы для выполнения задач. В статье мы рассмотрим его вариант, в котором ресурсом является одно или несколько ядер процессора, а задачи представлены потоками или процессами, которые нужно выполнить.
Само планирование осуществляется планировщиком, который нацелен:
- Максимизировать пропускную способность, то есть количество задач, выполняемых за единицу времени.
- Минимизировать время ожидания, то есть время, прошедшее с момента готовности процесса до начала его выполнения.
- Минимизировать время ответа, то есть время, прошедшее с момента готовности процесса до завершения его выполнения.
- Максимизировать равнодоступность, то есть справедливое распределение ресурсов между задачами.
Если с этими метриками вы не знакомы, то предлагаю просмотреть несколько примеров в другой моей статье (англ.), посвященной алгоритмам планировщика.
Типы процессов в Linux
В Linux процессы делятся на два типа:
- Процессы реального времени.
- Условные процессы.
Процессы реального времени должны вписываться в границы времени ответа, независимо от загрузки системы. Иначе говоря, такие процессы являются срочными и ни при каких условиях не откладываются.
В качестве примера можно привести процесс переноса, отвечающий за распределение рабочей нагрузки между ядрами ЦПУ.
Условные же процессы не ограничиваются строгими рамками времени ответа и в случае занятости системы могут подвергаться задержкам.
В пример можно привести процесс браузера, который позволяет вам читать эту статью.
У каждого типа процессов есть свой алгоритм планирования. При этом пока есть готовые к выполнению процессы реального времени, выполняться будут они, оставляя условные процессы в ожидании.

Планирование в реальном времени
В случае с планированием в реальном времени используются две политики,
SCHED_RR и SCHED_FIFO.Политика определяет количество выделяемого процессу времени, а также принцип организации очереди на выполнение.
Немного поясню.
Суть в том, что готовые к выполнению процессы хранятся в очереди, откуда выбираются планировщиком на основе той или иной политики.
SCHED_FIFO
В данной политике планировщик выбирает процесс, ориентируясь на время его поступления (FIFO = первым вошел, первым вышел).
Процесс с политикой планирования
SCHED_FIFO может «освободить» ЦПУ в нескольких случаях:- Процесс ожидает, к примеру, операции ввода/вывода, после чего по возвращению в состояние «готов» помещается в конец очереди.
- Процесс уступил ЦПУ через системный вызов
sched_yield, после чего он тут же возвращается в конец очереди.
SCHED_RR
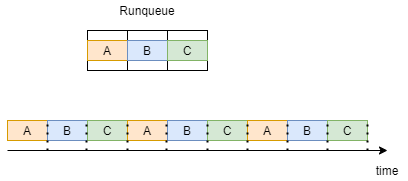
SCHED_RR подразумевает циклическое планирование.В этой политике каждый процесс в очереди получает интервал времени (квант) и выполняется в свою очередь (исходя из приоритета) по циклическому принципу.
Для лучшего понимания рассмотрим пример, где в очереди находятся три процесса,
A B C, все из которых работают по политике SCHED_RR. Как показано ниже, каждый процесс получает квант времени и выполняется в свою очередь. После однократного выполнения всех процессов они повторяются в той же последовательности.
Обобщение по планированию в реальном времени
Процесс реального времени может планироваться по двум разным политикам,
SCHED_FIFO и SCHED_RR.Политика влияет на принцип работы очереди и определяет, сколько времени нужно выделить тому или иному процессу.
Условное планирование
Здесь мы знакомимся с Completely Fair Scheduler (CFS, абсолютно справедливый планировщик), представляющим алгоритм планирования условных процессов, появившийся в версии Linux 2.6.23.
Помните метрики планирования, которые мы затронули в начале статьи? Так вот CFS фокусируется на одной из них – он стремится к максимальной равноправности процессов, то есть обеспечивает выделение всем процессам равных квантов времени ЦПУ.
Обратите внимание, что процессы с повышенным приоритетом все равно могут получать на обработку больше времени.
Для лучшего понимания принципа работы CFS нужно познакомиться с новым термином – виртуальное время выполнения (
vruntime).Виртуальное время выполнения
Виртуальное время выполнения процесса – это количество времени, потраченного именно на выполнение, без учета любых ожиданий.
Как было сказано, CFS стремится быть максимально справедливым, в связи с чем по очереди планирует готовый к выполнению процесс с минимальным виртуальным временем.
CFS задействует переменные, содержащие максимальное и минимальное виртуальное время выполнения, и чуть позже станет ясно зачем.
CFS —Абсолютно справедливый планировщик
Прежде чем перейти к принципу работы этого алгоритма, нужно понять, какие структуры данных он использует.
CFS задействует красно-черное дерево, представляющее бинарное дерево поиска – то есть добавление, удаление и поиск выполняются за
O(logN), где N выражает количество процессов.Ключом в этом дереве выступает виртуальное время выполнения процесса. Новые процессы или процесс, возвращающиеся из ожидания в состояние готовности, добавляются в дерево с ключом
vruntime = min_vruntime. Это очень важный момент, который позволяет избежать дефицита внимания ЦПУ для старых процессов.Вернемся к самому алгоритму. В первую очередь он устанавливает себе лимит времени –
sched_latency.В течение этого времени алгоритм стремится выполнить все готовые процессы –
N. Это означает, что каждый процесс получит интервал времени равный временному лимиту, поделенному на количество процессов: Qi = sched_latency/N.Когда процесс исчерпывает свой интервал (
Qi), алгоритм выбирает в дереве следующий процесс с наименьшим виртуальным временем.Рассмотрим ситуацию, которая может стать проблематичной для такой схемы работы алгоритма.
Предположим, что алгоритм выбрал лимит времени 48мс при наличии 6 процессов – в этом случае каждый процесс получит на выполнение по 8мс.
Но что произойдет, если система окажется перегружена процессами? Предположим, что лимит времени остается равен 48мс, но теперь у нас 32 процесса. В результате каждый получит уже всего по 1.5мс на выполнение, что приведет к замедлению работы всей системы.
Почему?
Все дело в переключении контекста, которое подразумевает сохранение состояния процесса или потока с последующим его восстановлением и продолжением выполнения.
Каждый раз, когда процесс исчерпывает свое время на выполнение, и планируется очередной процесс, активируется переключение контекста, которое также занимает некоторое время.
Предположим, что на него уходит 1мс. В первом примере, где каждому процессу у нас отводилось по 8мс, это вполне допустимо. Так мы тратим 1мс на переключение контекста и 7мс на фактическое выполнение процесса.
А вот во втором примере на выполнение каждого процесса останется уже всего по 0.5мс – то есть большая часть времени уходит на переключение контекста, отсюда и проблема с выполнением.
Для того, чтобы исправить ситуацию, мы вводим новую переменную, которая определит минимальную протяженность кванта времени выполнения –
min_granularity.Представим, что
min_granularity = 6мс, и вернемся к нашему примеру, где лимит времени равен 48мс при наличии 32 процессов. С помощью той же формулы, что и прежде, мы получаем по 1.5мс на каждый процесс, но теперь такой вариант не допускается, так как
min_granularity задает минимальный квант времени, который должен получить каждый процесс.В данном случае, где
Qi < min_granularity, мы берем Qi равным min_granularity, то есть 6мс, и соответствующим образом изменяем временной лимит. В результате он составит Qi x N = 6мс x 32 = 192мс.На данный момент отличия между CFS и RR могут оказаться недостаточно наглядны, поскольку они оба определяют временные интервалы и организуют порядок выполнения процессов. Для лучшего обобщения и понимания различий между этими алгоритмами я приведу краткую таблицу:
| RR – циклический список | CFS – абсолютно справедливый планировщик |
|
|
|
|
Надеюсь, что статься помогла вам лучше понять реализацию планирования задач в ядре Linux.
Прошу обратить внимание, что автор оригинальной статьи Eliran поблагодарил читателей за интерес и отдельно пригласил желающих со знанием английского языка в свой блог Coding Kaiser для ознакомления с множеством материалов по смежным и другим интересным темам, а также обмена идеями.

