
Четвероногие роботы Boston Dynamics — не единственные, чью разработку финанисрует DARPA в рамках программы Maximum Mobility and Manipulation (M3). И хотя гепард, построенный в лаборатории бионики Массачусетского технологического института пока отстаёт от своего более известного бостонского собрата в скорости и автономности, он тоже очень интересен. Кроме того, в отличие от Boston Dynamics, MIT публикует гораздо больше подробностей о конструкции и процессе разработки своих роботов.
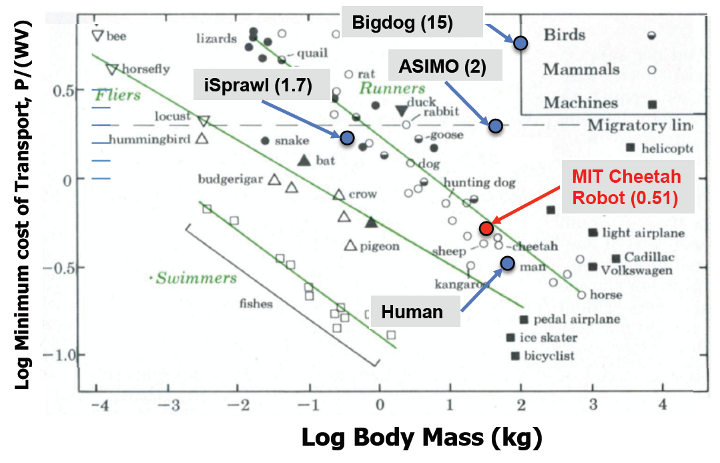
Создатели массачусетского гепарда считают одной из главных своих целей энергоэффективность робота. Чем меньше энергии тратит робот на то, чтобы двигаться с заданной скоростью, тем компактнее может быть его энергоустановка и тем дольше он сможет работать автономно. Эффективность передвижения гепарда MIT, который использует электропривод (в отличие от роботов Boston Dynamics, чьи ноги приводятся в движение гидравликой) очень близка к эффективности живого гепарда и других подобных сухопутных животных и в несколько раз выше Big Dog или двуногого робота Honda ASIMO.
Эффективность передвижения животных сильно зависит от среды, в которой они движутся. Экономнее всех расходуют энергию водоплавающие. За ними идут летающие животные, а тяжелее всех перемещаться сухопутным животным. Сравнительная эффективность разных видов животных, человека, некоторых механизмов и роботов хорошо видна на этом графике:
Добиться таких результатов удалось с помощью специально разработанных электродвигателей и тщательно продуманной конструкции ноги. Двигатели имеют очень большой радиус, благодаря чему развивают гораздо более высокий, чем у любых серийных приводов, крутящий момент. Благодаря низким оборотам такого двигателя стало возможным использовать простой одноступенчатый редуктор. Низкие потери в редукторе и низкие обороты двигателя позволяют эффективно рекуперировать энергию — при касании земли ногой электродвигатель служит амортизатором, но не рассеивает энергию толчка в виде тепла, а возвращает её в батарею.
Двигатели бедра и колена расположены в бедренном суставе, благодаря чему нога гепарда имеет очень малый вес. Дополнительно облегчить конструкцию удалось, используя кевларовые «сухожилия», которые снимают заметную часть нагрузки с «костей». Ещё один подсмотренный у природы приём — для удержания равновесия и более быстрых и точных манёвров активно используется хвост.
Сейчас команда проекта сосредоточилась на совершенствовании электродвигателей. По словам директора лаборатории бионики, профессора Ким Санг Бэ, с новыми двигателями 30-килограммовый гепард MIT сможет разогнаться до 56 км/ч, что на 10 км/ч быстрее рекорда бостонского гепарда. А по энергоэффективности он должен обогнать свой природный прототип, приблизившись к показателям летающих животных.
